Product Description
The IMU406 is a compact and high-performance 9-axis inertial measurement unit (IMU), integrating a 3-axis gyroscope, 3-axis accelerometer, and attitude calculation algorithm to provide real-time motion sensing and orientation tracking.
Designed with advanced MEMS technology, the IMU406 delivers stable and accurate attitude data even in dynamic environments. Its small size, low power consumption, and strong anti-interference capability make it ideal for embedded systems, robotics, and navigation applications.
Key Features
- 9-axis IMU: 3-axis gyroscope + 3-axis accelerometer + attitude fusion
- High precision attitude sensing (0.01° resolution)
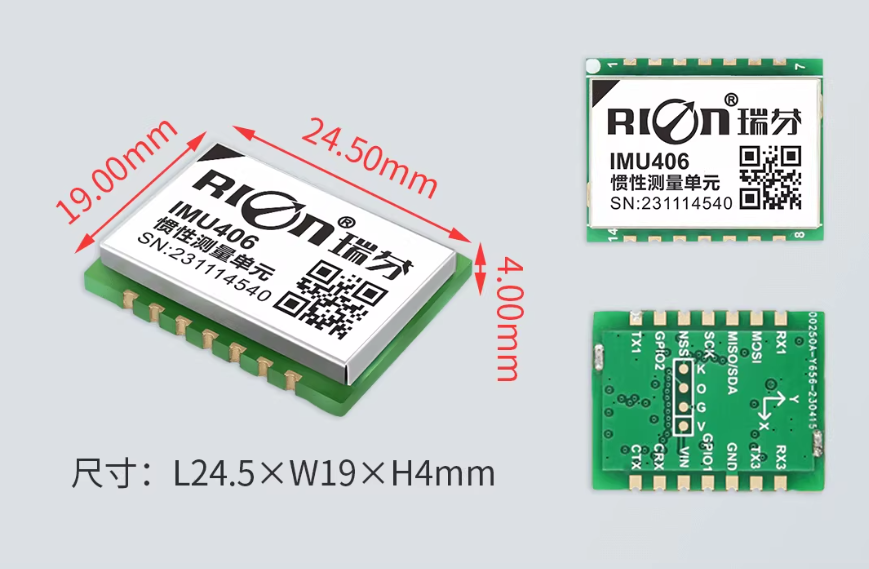
- Compact size: 24.5 × 19 × 4 mm
- High update rate up to 200 Hz
- Built-in dynamic attitude algorithm
- Temperature compensation for stable output
- Strong anti-magnetic interference capability
- TTL communication interface (3.3V)
- Low power consumption (60 mA)
- Lightweight design (≤15 g)
Technical Specifications
Attitude Performance
| Parameter | Specification |
|---|---|
| Heading (Yaw) | ±180° |
| Roll | ±180° |
| Pitch | ±90° |
| Bandwidth | >100 Hz |
| Resolution | 0.01° |
| Nonlinearity | 0.1% FS |
Gyroscope
| Parameter | Specification |
|---|---|
| Measurement Range | 250°/s (Optional: 2000°/s) |
| Bias Instability (Allan) | 4.5°/h |
| Angle Random Walk | 0.25°/√h |
| Bias Stability (10s Avg) | 8.5°/h |
| Zero Bias (@ -10°C ~ +65°C) | ±0.25°/s (RMS) |
Accelerometer
| Parameter | Specification |
|---|---|
| Measurement Range | ±4 g |
| Resolution | 0.001 g |
| Accuracy | 1 mg |
| Bias Instability | 0.05 mg |
| Velocity Random Walk | 0.015 m/s/√h |
| Bias Stability (10s Avg) | 0.15 mg |
Electrical Specifications
| Parameter | Specification |
|---|---|
| Input Voltage | DC 3.3V (Ripple <50mVpp) |
| Current Consumption | 60 mA |
Environmental Specifications
| Parameter | Specification |
|---|---|
| Operating Temperature | −40°C to +80°C |
| Storage Temperature | −40°C to +85°C |
| Vibration Resistance | 5 – 10 g |
| Shock Resistance | 200 g pk, 2 ms |
Output & Interface
| Parameter | Specification |
|---|---|
| Output Rate | 5 / 15 / 25 / 35 / 50 / 100 / 200 Hz |
| Interface | 3.3V TTL UART |
| Output Data | Attitude, Angular velocity, Acceleration |
Mechanical Specifications
| Parameter | Specification |
|---|---|
| Dimensions | 24.5 × 19 × 4 mm |
| Weight | ≤15 g (without cable) |
| Material | Polymer |
Reliability
| Parameter | Specification |
|---|---|
| Service Life | 10 years |
| MTBF | ≥98,000 hours |
Applications
- Robotics (AGV / AMR / humanoid robots)
- UAV / drones
- Motion tracking systems
- Smart devices & IoT
- Industrial automation
- Navigation and positioning systems
Software & Resources
The IMU406 provides a complete development ecosystem:
- User manual
- Upper computer software
- Serial communication driver
- Schematic diagrams
- 3D models
👉 Easy integration into embedded systems and industrial applications
Why Choose IMU406
Compared with standard IMU modules, IMU406 offers:
- Smaller size with higher integration
- Better stability under dynamic conditions
- Strong anti-interference capability
- Faster response and higher output frequency