





Overview
AGIBOT OmniHand 2025 is a compact, high-DOF dexterous robotic hand designed for interactive manipulation and seamless integration with AGIBOT and third-party robots. Two versions are available: OmniHand 2025 and OmniHand 2025w/Tactile (with tactile sensing).
Key Features
- 16 Degrees of Freedom (Total DOF), 10 Active DOF
- Compact & lightweight: total length 180 mm; weight ≤500 g (OmniHand 2025) or ≤550 g (OmniHand 2025w/Tactile)
- Motor + gear drive with linkage mechanism transmission
- Agile interaction: supports common interactive gestures and back-of-hand touch interaction
- Fast actuation: minimum open/close time (typ.) 0.7 s
- Communication interface: CANFD/RS485; communication rate 1 kHz
- Secondary development: supported; OS support: Windows
- Tactile option (OmniHand 2025w/Tactile): 400+ tactile points; tactile pressure supported in control modes
- Safety-oriented design: anti-pinch design; over 400 touch-sensitive force control points across the hand (tactile version)
For integration guidance (CANFD/RS485 wiring, control modes, and host setup), contact the store customer service team.
Specifications
| Parameter | OmniHand 2025 | OmniHand 2025w/Tactile |
|---|---|---|
| Brand model | OmniHand 2025 | OmniHand 2025w/Tactile |
| Weight | ≤500g | ≤550g |
| Size | 180×85×38.5mm | 180×85×38.5mm |
| Material | PA + Silicone | PA + Silicone |
| Active DOF | 10 | 10 |
| Total DOF | 16 | 16 |
| Transmission | Linkage mechanism | Linkage mechanism |
| Drive | Motor + Gear | Motor + Gear |
| Joint Angles |
Four fingers flexion: 80° Four fingers abduction: ±10° Thumb flexion: 50° Thumb abduction: 100° Thumb rotation: 60° |
Four fingers flexion: 80° Four fingers abduction: ±10° Thumb flexion: 50° Thumb abduction: 100° Thumb rotation: 60° |
| Min. Open/Close Time (typ.) | 0.7s | 0.7s |
| Min. Grasp Diameter | 5mm | 5mm |
| Repeatability (typ.) | 0.5mm | 0.5mm |
| Max. Fingertip Force (typ.) | 5N | 5N |
| Operating Voltage | 24V | 24V |
| Idle Current | 0.2A | 0.2A |
| Max. Current | 3.5A | 3.5A |
| Communication Interface | CANFD/RS485 | CANFD/RS485 |
| Operating Temperature | -10°~45° | -10°~45° |
| Load Capacity (5cm rigid object, palm up) | 1kg(typ) 2kg(max) | 1kg(typ) 2kg(max) |
| Load Capacity (5cm left object, palm up) | 0.5kg(typ) 2kg(max) | 0.5kg(typ) 2kg(max) |
| Sensor Array | / | 400+ tactile points |
| Sensor Resolution | / | 0.1 |
| Sensing Range | / | 0-20N |
| Maximum Allowable Force (non-destructive) | / | 200N |
| OS Support | windows | windows |
| Communication Rate | 1kHz | 1kHz |
| Data Packet Size | Rx: 51 bytes Tx: 61 bytes | Rx: 51 bytes Tx: 61 bytes |
| Control Modes | Joint position (P) angle (A) torque (t) speed (T) temperature voltage/current | Joint position (P) angle (A) torque (t) speed (T) temperature voltage/current tactile pressure |
| Secondary Development | Supported | Supported |
| Compatibility | Compatible with AGIBOT and third-party robots | Compatible with AGIBOT and third-party robots |
What’s Included
- OmniHand ×1
- RS485 Communication Cable ×1
- CANFD Communication Cable ×1
- Power Cable ×1
- Type-C Data Cable ×1
- Certificate of Conformity ×1
Applications
- Humanoid robot end-effector integration
- Interactive gesture demonstration and human–robot interaction research
- Dexterous grasping and manipulation prototyping
Details

AGIBOT OmniHand is a compact, high-DOF dexterous robotic hand built for interactive manipulation and easy integration.

A lightweight build helps keep payload low while maintaining a full dexterous hand form factor.

Back-of-hand touch interaction supports responsive gesture-based human–robot interaction.
For the tactile version, 400+ touch points enable safety-oriented force control with an anti-pinch design.
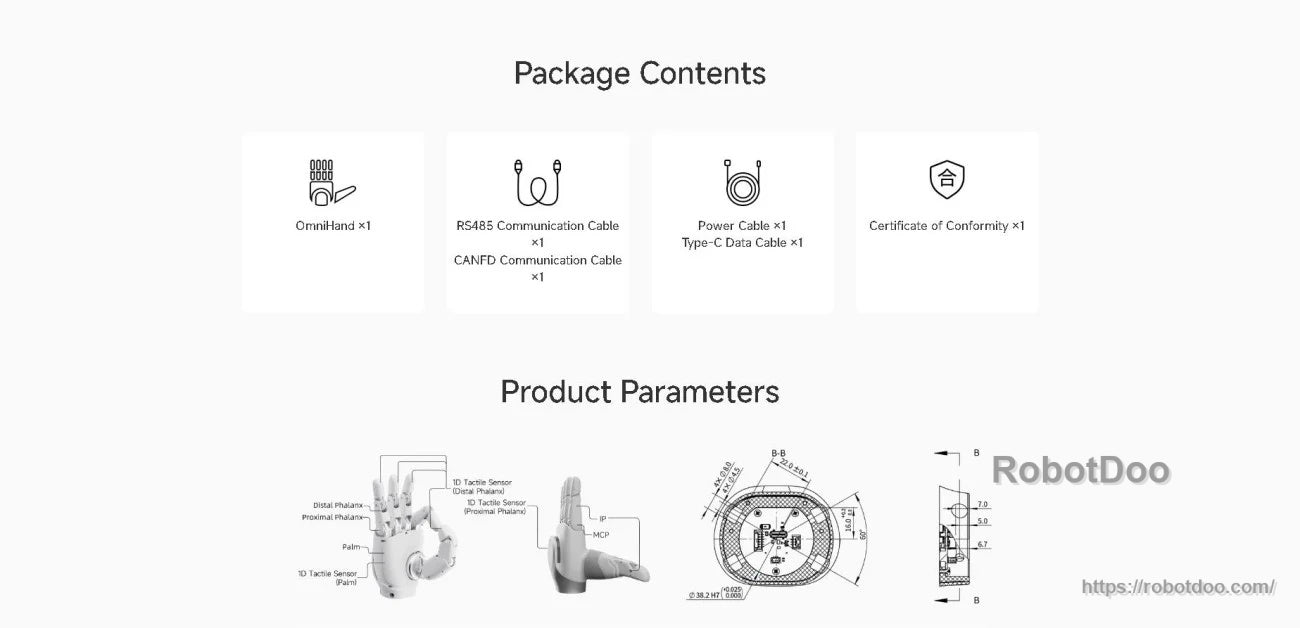
Package contents and reference drawings support faster setup, including CANFD/RS485 communication cabling.





