














Overview
AgileX PiPER is a 6-DOF robotic arm designed for precise manipulation tasks, with an integrated controller and CAN communication. Two variants are provided in the specifications: PiPER and PiPER X. The series supports drag teaching, offline trajectory, API, and PC-based programming, and can be controlled via a Python API with support for both ROS1 and ROS2.
Key Features
- 6-DOF structure with joints labeled J2 Motor, J3 Motor, J4 Motor, J5 Motor, J6 Motor
- Payload: 1.5 kg
- Repeatability: 0.1 mm (specification: ±0.1 mm)
- Reach: 626 mm (PiPER) / 669.59 mm (PiPER X)
- Harsh environment adaptability: designed to operate from -20°C to 50°C
- Open source support: Python API control; supports ROS1 and ROS2
- PiPER-X positioning: developer-friendly 6-DoF robotic arm for manipulation research; “highly agile wrist” and “desktop teaching” are highlighted
- User interface: tablet-based interface is described for building and controlling applications
Applications
- Humanoid Robots
- Robotic Arms
- Exoskeletons
- Quadruped Robots
- AGV Vehicles
- ARU Robots
Specifications
| Parameter | PiPER X | PiPER |
|---|---|---|
| Model | PiPER X | PiPER |
| DOF | 6 | 6 |
| Payload | 1.5 kg | 1.5 kg |
| Weight | 4.5 kg | 4.2 kg |
| Repeatability | ±0.1 mm | ±0.1 mm |
| Reach | 669.59 mm | 626 mm |
| Input voltage | DC 24 V | DC 24 V |
| Material | Aluminum & Plastic housing | Aluminum alloy body, polymer shell |
| Controller | Integrated | Integrated |
| Communication | CAN | CAN |
| Programming | Drag teaching / offline trajectory / API / PC | Drag teaching / offline trajectory / API / PC |
| External Interface | Power ×1, CAN ×1 | Power ×1, CAN ×1 |
| Base installation dimensions | 70 mm × 70 mm × M5 × 4 | 70 mm × 70 mm × M5 × 4 |
Downloads
- AgileX PiPER Robotic Arm 3D Model.STP
- AgileX PiPER Claw Clip Robotic Arm 3D Model.STP
- AgileX PiPER X Robotic Arm 3D Model.STP
Details
PiPER combines a compact 6‑DOF arm with 1.5 kg payload, 626 mm reach, and ±0.1 mm repeatability for precise manipulation.
Built for precision, speed, and adaptability, PiPER is designed to fit neatly into lab and desktop workflows.
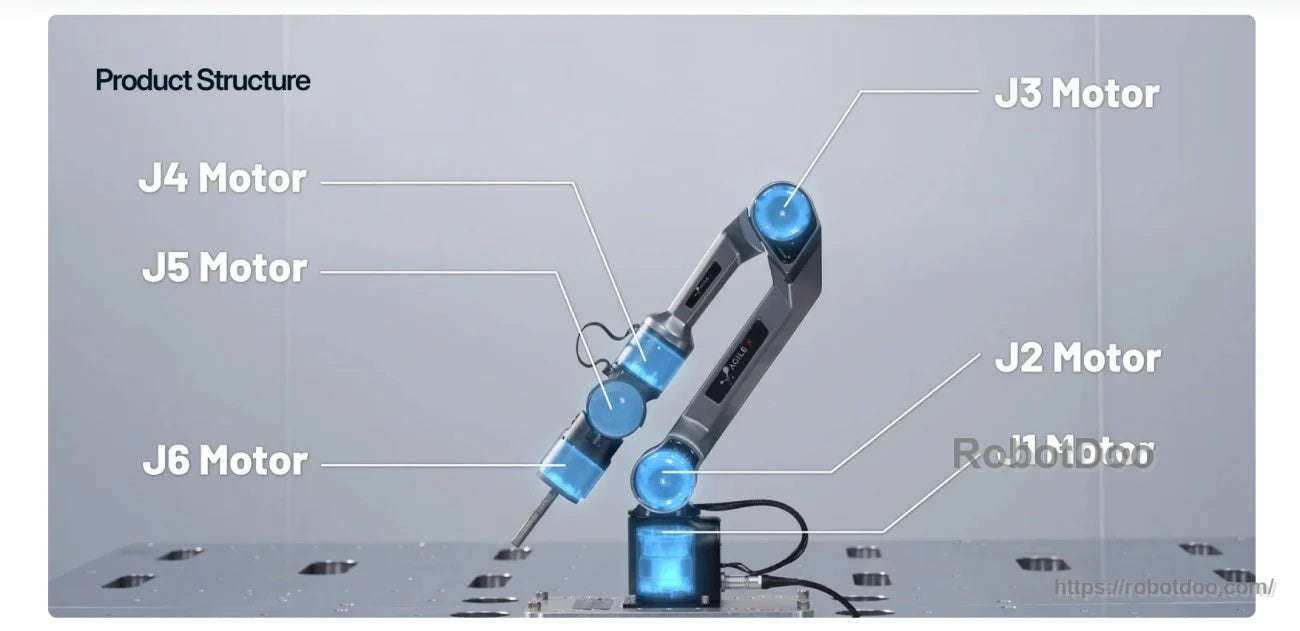
A clear 6‑DOF joint layout simplifies integration and debugging when developing motion and control algorithms.
Despite its lightweight build, the arm is engineered to handle a stable 1.5 kg payload while staying agile.
Precision control and smooth path planning help deliver consistent motion for detailed tasks and repeatable experiments.
Operation from -20°C to 50°C supports deployments that need reliable motion in tougher temperature ranges.
A compact footprint and tidy cabling make PiPER easy to mount on benches, fixtures, or mobile platforms.
A tablet-style interface streamlines setup and day-to-day control for rapid prototyping.

PC-based workflows support interactive control and visualization during development and testing.
Use a Python API and integrate into ROS1 or ROS2 stacks to fit common robotics research pipelines.
Software support for Python, ROS, and ROS2 helps teams move from demos to research-grade integration faster.
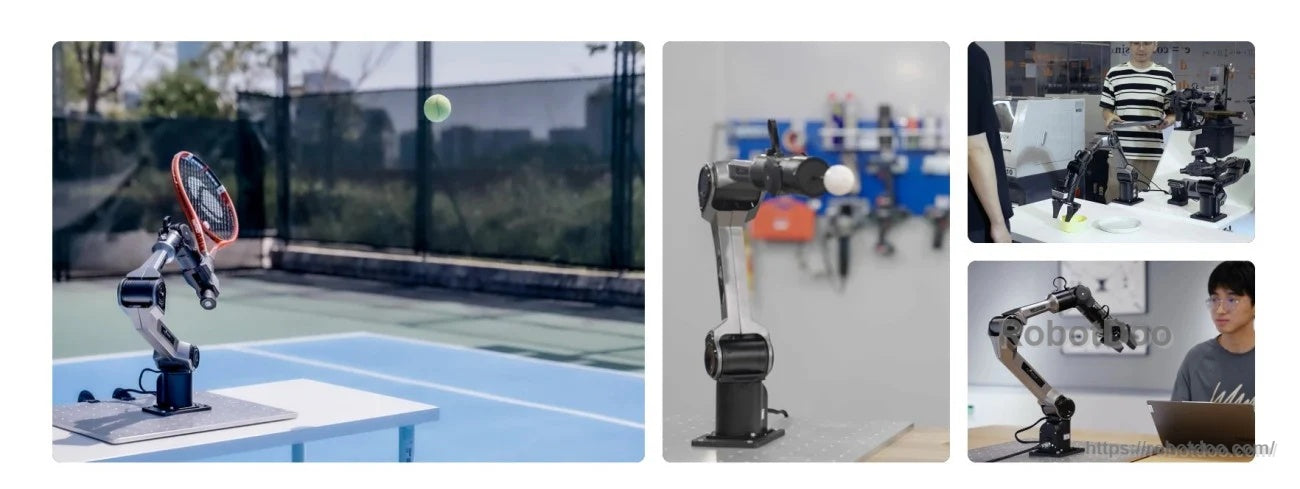
Suitable for a wide range of manipulation scenarios, from lab prototyping to application-focused demos.
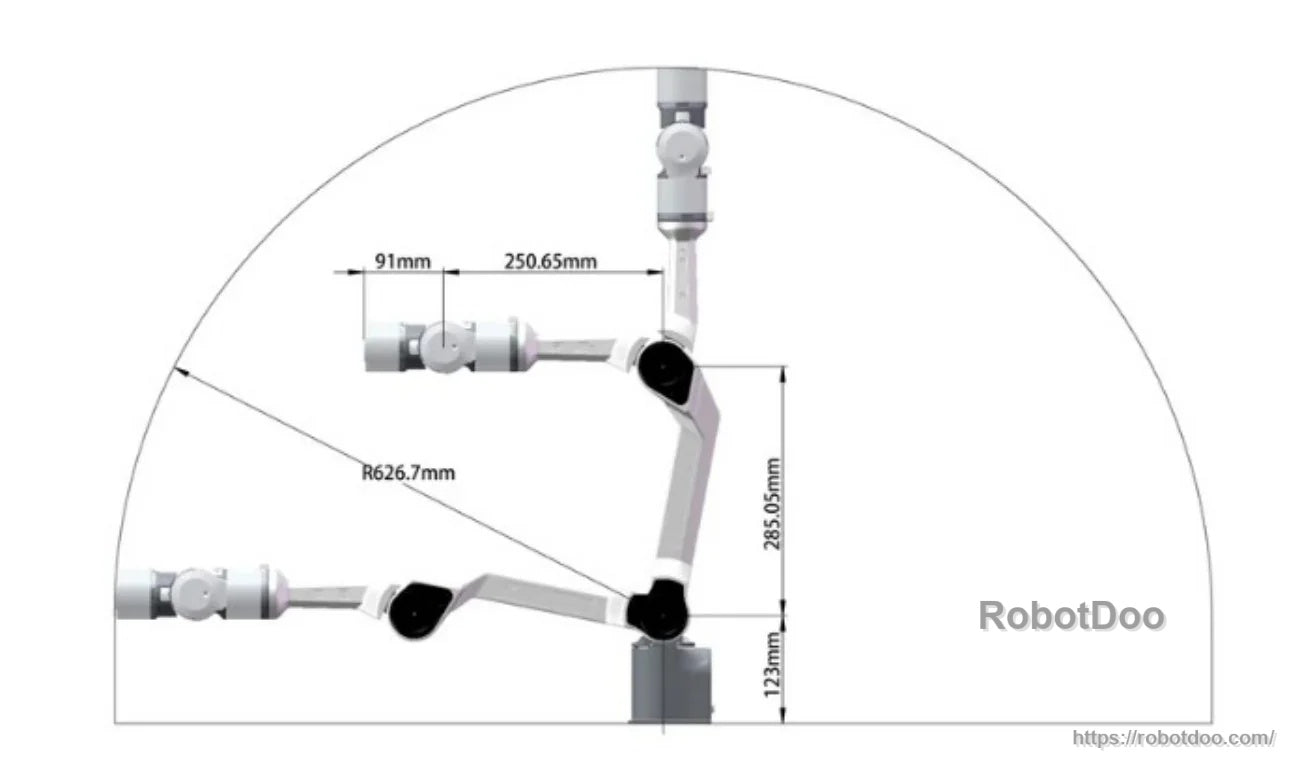
Workspace and reach geometry help plan fixtures, safety clearance, and end-effector placement.

PiPER X extends reach to 669 mm while maintaining 1.5 kg payload and ±0.1 mm repeatability.
PiPER X emphasizes a highly agile wrist and desktop teaching to speed up iteration on complex motion tasks.
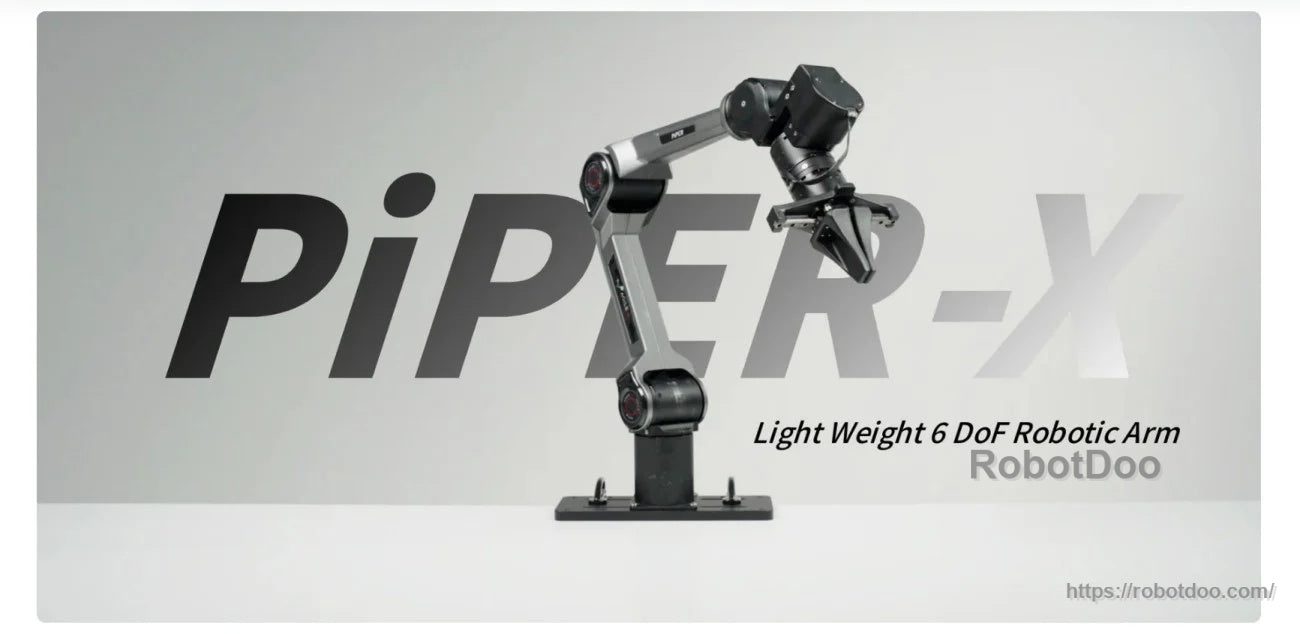
PiPER X pairs a lightweight 6‑DOF structure with developer-friendly tooling for manipulation research and benchmarking.
Repeatable trajectories support benchmarking, regression testing, and research experiments that depend on consistency.

Host-software teaching and motion replay make it easy to capture key poses and reuse trajectories across runs.

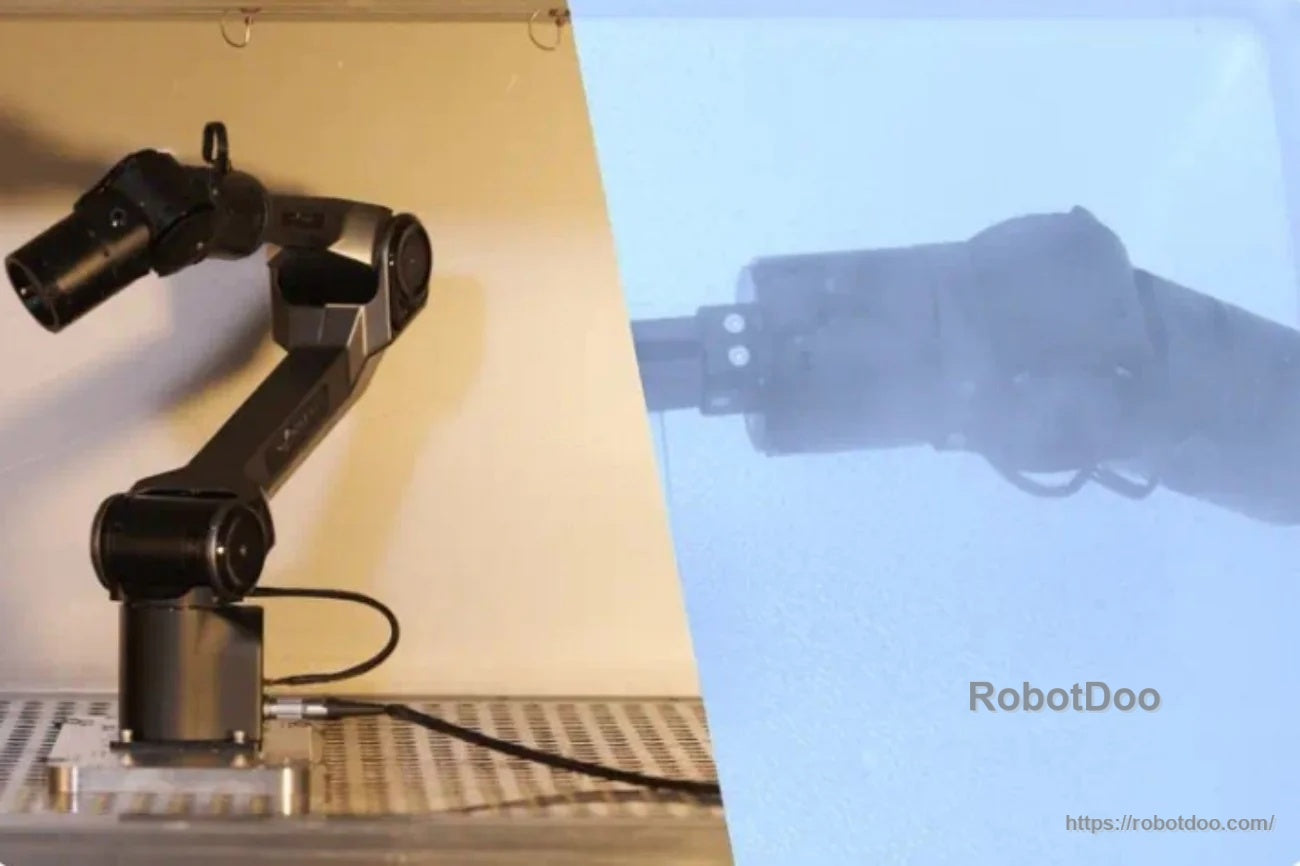
The AgileX PiPER robot arm mounts to a flat base for stable benchtop setups and controlled joint movement.
AgileX PiPER and PiPER-X support ROS workflows and an SDK/API for custom development, from motion commands to task scripts.

The PiPER 6-DOF robot arm can be equipped with a screwdriver-style end tool for small assembly and fastening tasks.
The agile wrist supports rapid orientation changes and multi-angle manipulation for insertion, alignment, and tight-space tasks.

The AgileX PiPER 6-DOF robot arm features an articulated jointed design on a stable base with a front-mounted tool head.
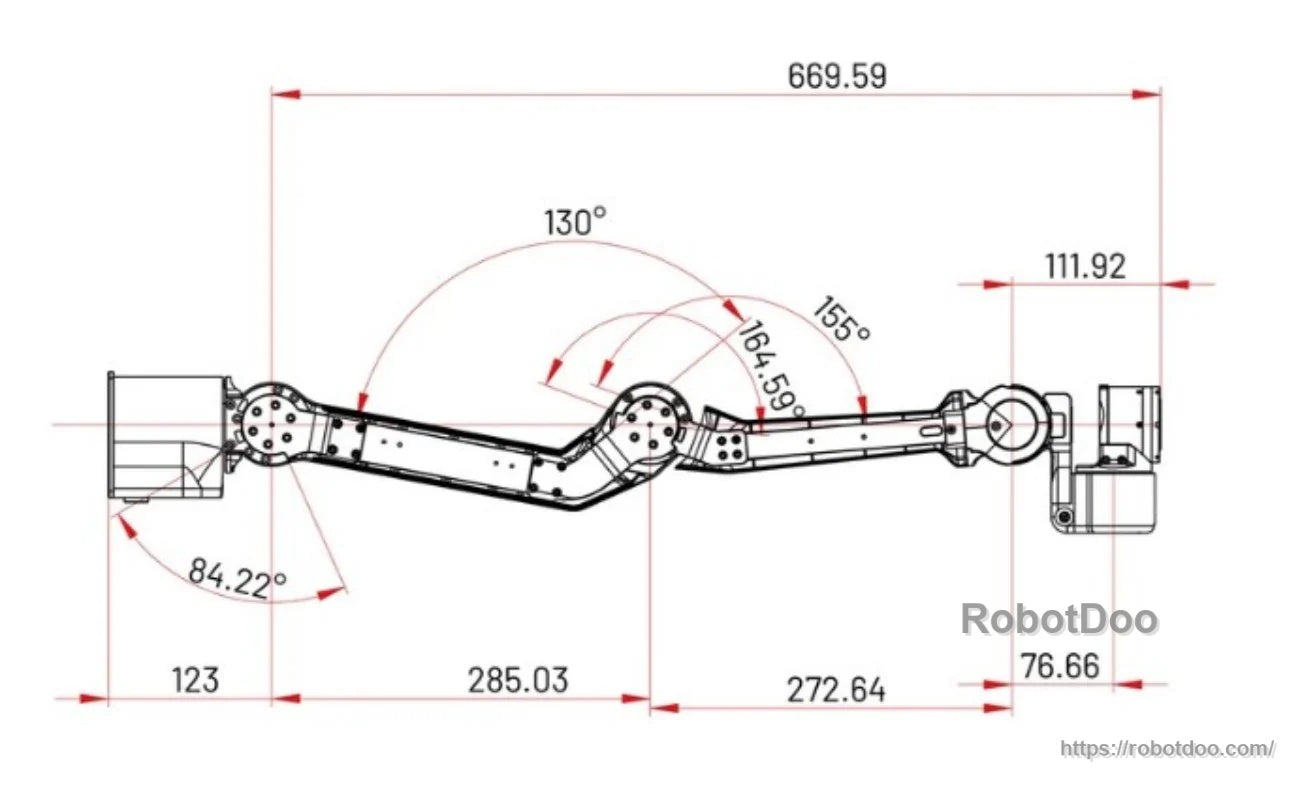
AgileX PiPER & PiPER X 6-DOF robot arm dimensions and joint angle ranges help plan workspace clearance and mounting.














