Overview
CubeMars Driver Board V2.1 is a DC brushless motor driver board for AK series actuators, designed for high-precision control with CAN communication. The board supports MIT servo mode control and features double encoders for zero-position memory after power-off, plus PC-based debugging and calibration.
Key Features
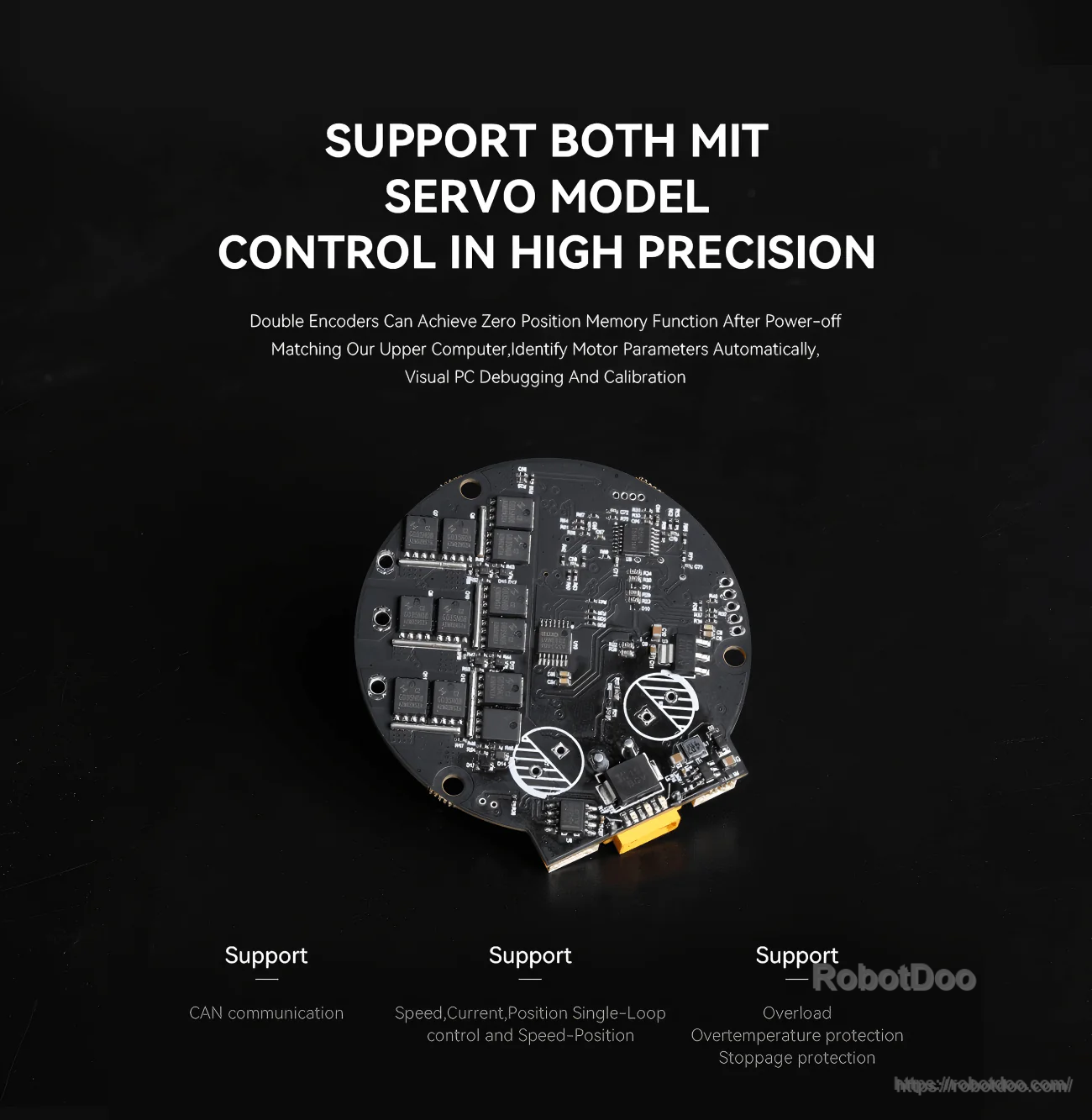
- Support both MIT servo mode control in high precision
- Double encoders support zero position memory function after power-off
- Motor parameter identification with upper-computer support
- Visual PC debugging and calibration
- Support CAN communication
- Support Speed/Current/Position single-loop control and Speed-Position
- Support overload, overtemperature, and stoppage protection
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
Specifications
| Power supply (graphic) | 6-12S |
| Rated current (graphic) | 40A |
| Rated voltage | 48V |
| Peak voltage | 52V |
| Rated current (spec table) | 20ADC |
| Peak current | 60ADC |
| Standby power consumption | ≤50 |
| CAN bus baud rate | 1Mbps |
| Diameter | 62mm×58mm |
| Operation ambient temperature | -20°C to 65°C |
| Peak temperature of control panel | 100°C |
| Encoder accuracy | 14bit |
Manuals
AK-Series-Module-Driver-Manual-V1.0.17.pdf
Details

Designed for AK-series actuators, this V2.1 driver board pairs CAN communication with a 6–12S input range for compact robot builds.
MIT servo control, dual-encoder zero-position memory, and built-in protection help keep motion control stable during tuning and operation.