





Overview
CubeMars GL40 II is a gimbal motor designed for smooth, low-speed servo performance and flexible control with a large hollow shaft. It supports the installation of a hollow driver board for more flexible control, and the drive solution supports CAN and PWM communication with multiple control modes.
Key Features
- Smooth operation; supports installation of a hollow driver board for flexible control.
- Drive solution supports CAN and PWM communication.
- Three control modes: MIT mode, Velocity-position mode, Velocity mode.
- Upgraded electromagnetic design and motor structure; cogging torque reduced from 1 cN.m to 0.7 cN.m.
- Larger hollow shaft and compact form factor: hollow shaft diameter increased from Ø8 mm to Ø12.5 mm; overall motor diameter reduced from Ø46.5 mm to Ø46.1 mm.
- Dual interface for debugging: XT30 2+2 (black interface) and CJT-3pin (white interface). The XT30 2+2 combines the power cable and CAN signal cable into one; the CJT-3pin supports connection to an upper computer for communicating and adjusting parameters.
- Upper computer support: current loop parameters and serial port baud rate settings; one-click motor parameter recognition; multiple working modes.
Specifications
| Parameter | Value |
|---|---|
| Peak torque | 0.68N.m |
| Peak current | 5.22ADC |
| No-load speed | 1388rpm |
| Kv | 82.5rpm/V |
| Kt | 0.11N.m/A |
| Ke | 0.0115V/krpm |
| Phase to Phase resistance | 3000mΩ |
| Phase to Phase inductance | 1320μH |
| Inertia | 79.45g.cm² |
| Km | 0.06392 Nm/√W |
| Mechanical Time Constant | 2.045ms |
| Maximum Torque Weight Ratio | 60.71N.m/kg |
| Electrical Time Constant | 0.44ms |
| Weight | 112g |
| Rated Torque | 0.25N.m |
| Rated Speed | 697rpm |
| Rated Current | 1.88ADC |
| Rated Voltage | 16V |
| Insulation Class | H |
| Driving way | FOC |
| Operation Ambient Temperature | -20°C~50°C |
| Winding type | star |
| Insulation High-Voltage | 500V 5mA/2s |
| Insulation Resistance | 500V 10MΩ |
| Phase | 3 |
| Pole Pairs | 14 |
Applications
- Gimbal systems requiring smooth low-speed operation
- Compact servo actuation where a hollow shaft is needed for routing cables or integrating slip rings
Manuals
- Gimbal Motor Drive User Manual (PDF)
- Gimbal Motor Driver Quick Operation Manual (PDF)
- GL40 II Motor Installation Dimension Drawing (PDF)
- GL II upper computer (ZIP)
- GL40II STP (ZIP)
Details

Smooth, low-speed servo performance with a larger hollow shaft supports cleaner cable routing and flexible integration.

Optional hollow driver board enables CAN and PWM communication with multiple control modes for precise tuning.

Lower cogging torque helps deliver steadier motion for gimbal applications that need ultra-smooth starts and holds.

A larger Ø12.5 mm hollow shaft and compact Ø46.1 mm form factor improve compatibility for tight builds and slip-ring routing.

Dual debugging ports include an XT30 2+2 for combined power and CAN, plus a CJT-3pin for upper-computer parameter access.
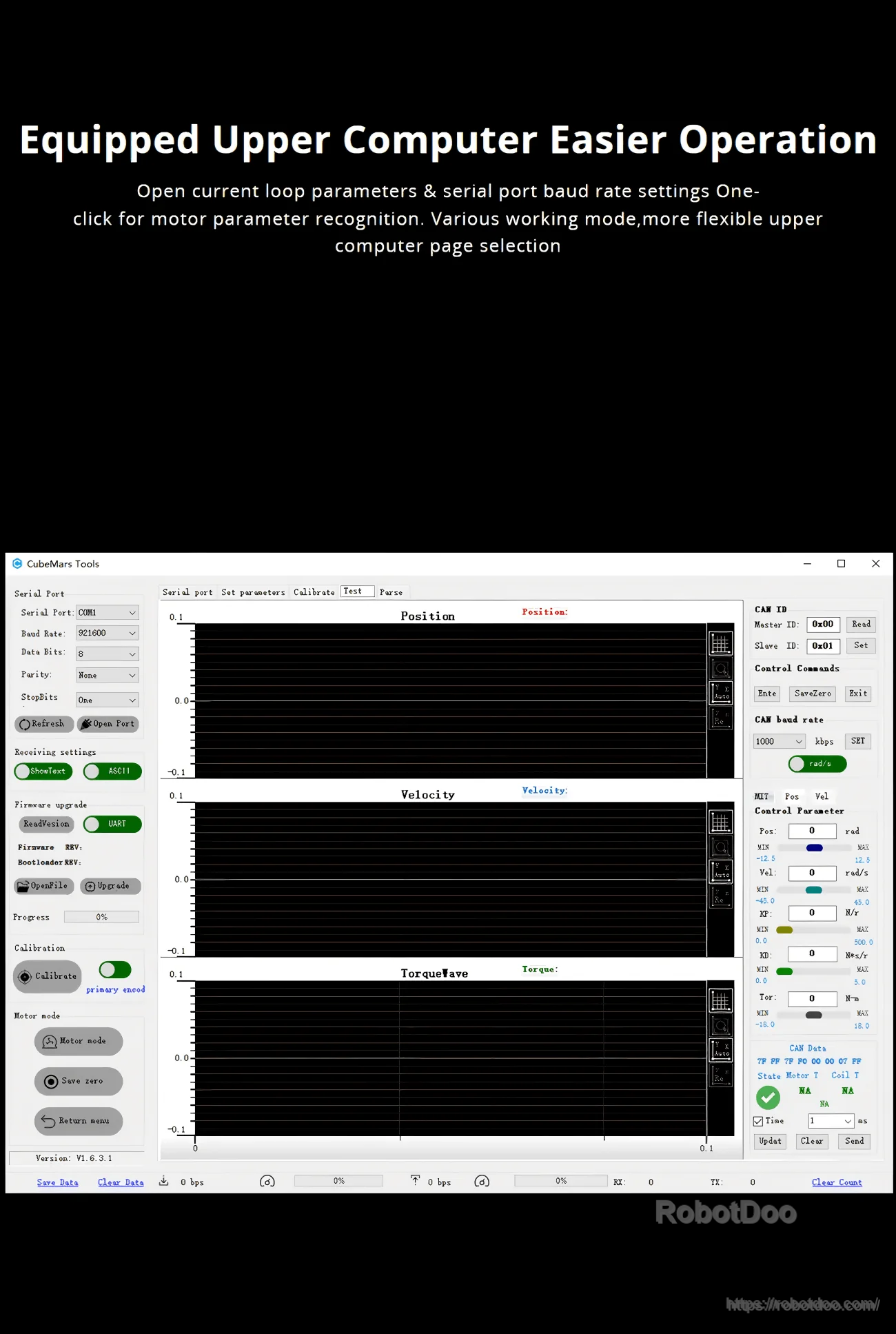
Upper-computer tools support one-click motor recognition, current loop settings, and baud rate configuration.





