





Overview
CubeMars GL60 II is a motor positioned as a gimbal motor with a large hollow shaft design. It supports installation of a hollow drive board for more flexible control. The drive board is described as supporting CAN and PWM communication, with three control modes: MIT mode, velocity-position mode, and velocity mode.
Key Features
- Large hollow shaft design (bore size: 20mm)
- Drive board support described with CAN and PWM communication
- Three control modes: MIT mode, velocity-position mode, velocity mode
- Upgraded electromagnetic design and motor structure; cogging torque stated as reduced from 2.4 cN.m to 1.5 cN.m
- Dual interface description for debugging/connection: XT30 2+2 (black interface) and CJT-3pin (white interface)
- Upper-computer software operation described with current-loop parameter and serial-port baud-rate settings, plus one-click motor parameter recognition
Specifications
| Parameter | Value (16V) | Value (24V) |
|---|---|---|
| Working Voltage | 16V | 24V |
| Rated Current | 1.56A | 1.54A |
| Rated Speed | 153rpm | 319rpm |
| Rated Torque | 0.6N.M | 0.6N.m |
| Line Inductance | 6mH | 6mH |
| Peak Current | 2.75A | 4.09A |
| Peak Torque | 1N.m | 1.5N.m |
| Winding Resistance | 5.8Ω | 5.8Ω |
| Torque Constant | 0.34Nm/A | 0.34Nm/A |
| Rotor Inertia | 401.086g.cm^2 | 401.086g.cm^2 |
| Configuration | 24N28P | 24N28P |
| Motor Dimensions | 70.5*33.6mm | 70.5*33.6mm |
| Bore Size | 20mm | 20mm |
| Weight | 276g | 276g |
| Package Dimensions | 160*122*42mm | 160*122*42mm |
| Copper Wire | Level E 150C | Level E 150C |
| Enamelled Wires Temperature Resistance Grade | Level H 180C | Level H 180C |
| Stator Technology | Rust-proof, 180C coating | Rust-proof, 180C coating |
| Coil Withstand Voltage | 500V 5mA/2s | 500V 5mA/2s |
| Waterproof and dustproof class | / | / |
| Wiring Method | / | / |
| Bearings | Imported 6705 ZZ | Imported 6705 ZZ |
Applications
- Gimbal and stabilization mechanisms
- Robotics joints and compact servo actuation (where the listed voltage/current/torque requirements match)
- Motion-control projects requiring a hollow-bore motor design
Manuals / CAD
Details
CubeMars GL60 II is built around a large hollow-shaft motor body for clean routing and flexible gimbal integration.
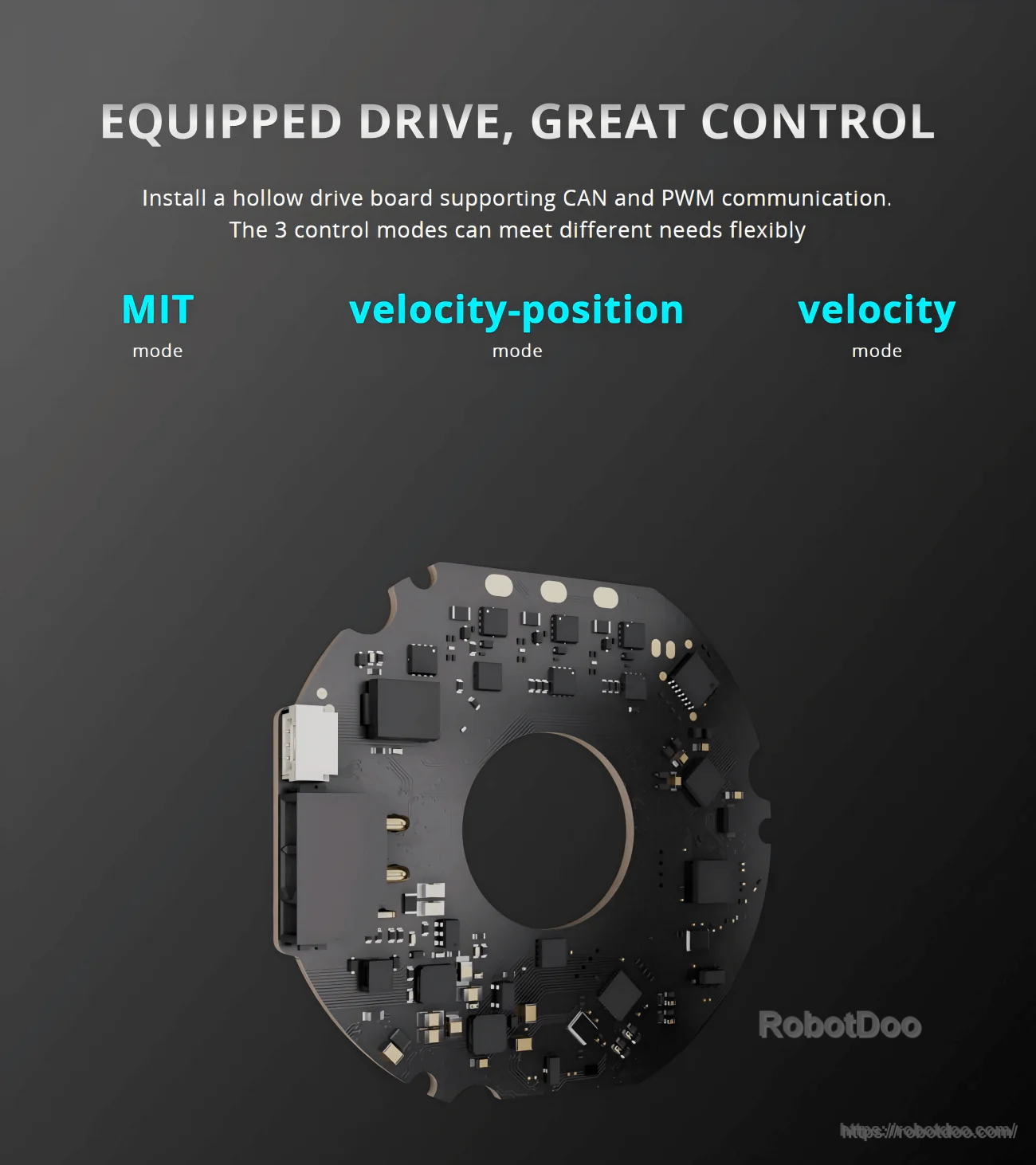
An optional hollow drive board supports CAN and PWM communication with MIT, velocity-position, and velocity control modes.

Upgraded electromagnetic design helps reduce cogging torque for smoother low-speed servo performance.

Dual interfaces simplify wiring and tuning: XT30 2+2 for power/CAN and a CJT-3pin port for debugging and PC connection.






