Overview
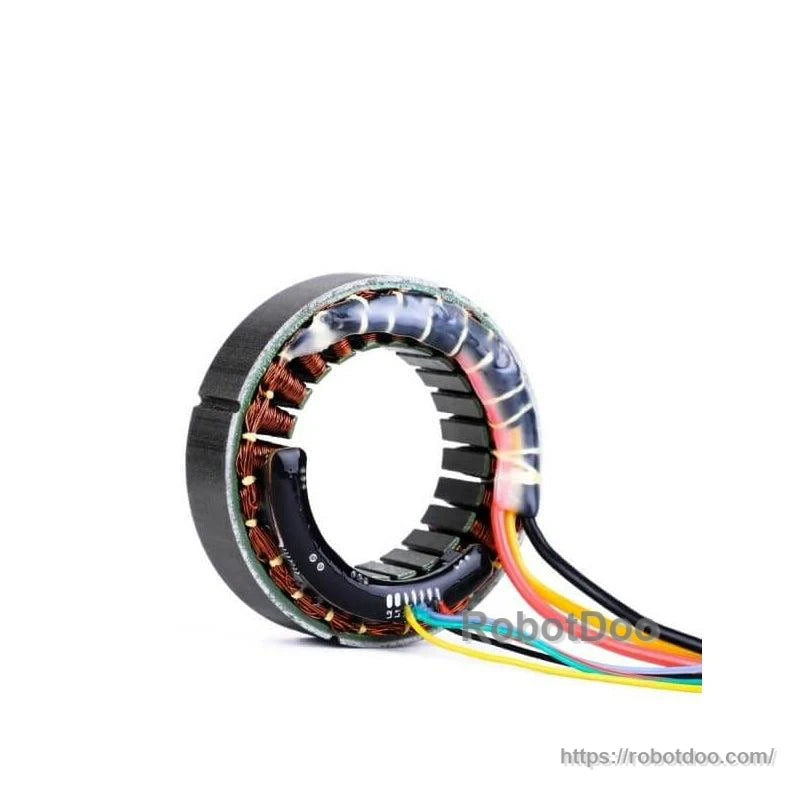
CubeMars RI60 is a frameless motor designed for integration into cobot arms and exoskeleton joints. The RI60 KV120 variant supports FOC drive and is specified for 24/36/48 V systems, targeting compact, low-cogging, smooth-running robotic actuators.
Key Features
- Lower cogging torque, smooth running
- Running with low noise; strong dynamic
- Hand winding for delicate performance
- 0.5 mm clearance on the edge of stator for better installation
- Excellent copper fill factor to meet high torque density and dynamics
- Curved permanent magnet
- BEMF Sinus motor design for easy control
- RI60 rotor heightened version: overall rotor height increased by 2 mm for improved Hall sensor sensing when a Hall sensor is installed
- Encoder options: high resolution; high precision control with 0.01°; Renishaw, Sick and other high precision encoder
Specifications
| Series / Category | RI Frameless Series |
| Model | RI60 KV120 |
| Application | Cobot Arm/Exoskeleton |
| Driving Way | FOC |
| Phase | 3 |
| Rated Voltage (V) | 24/36/48 |
| Kv (rpm/V) | 120 |
| Winding Type | Delta |
| Pole Pairs | 14 |
| Rated Power (W) | 85 |
| Rated Torque (Nm) | 0.57 |
| Rated Speed (rpm) | 1440/2320/3190 |
| Rated Current (ADC) | 5.6 |
| Peak Torque (Nm) | 1.63 |
| Peak Current (ADC) | 16.8 |
| No-Load Speed (rpm) | 2532/3798/5064 |
| Kt (Nm/A) | 0.100 |
| Ke (V/krpm) | 9.03 |
| Phase to Phase Resistance (mΩ) | 900 |
| Phase to Phase Inductace (μH) | 877.5 |
| Inertia (gc㎡) | 33.05 |
| Km (Nm/√W) | 0.1054 |
| Mechanical Time Constant (ms) | 0.3 |
| Electrical Time Constant (ms) | 0.98 |
| Insulation Class | C |
| Insulation High-Voltage | 1000V 5mA/2s |
| Insulation Resistance | 1000V 10MΩ |
| Operation Ambient Temperature | -20°C to 50°C |
| Working Environment | -40°C to 85°C |
| Weight (g) | 155.9 |
| Maximum Torque Weight Ratio (Nm/Kg) | 10.46 |
| Size (diameter × length) (mm) | Φ60*23 |
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
Manuals / CAD
Details

Designed for compact actuators where smooth rotation, low cogging torque, and quiet operation matter in robotic joints.

Hand-wound stator coils and a small edge clearance help streamline integration into cobot arms and exoskeleton joints.

Curved permanent magnets support a sinusoidal BEMF profile for smoother FOC control.

A heightened rotor option adds 2 mm of overall rotor height to improve Hall sensor sensing when a Hall sensor is used.
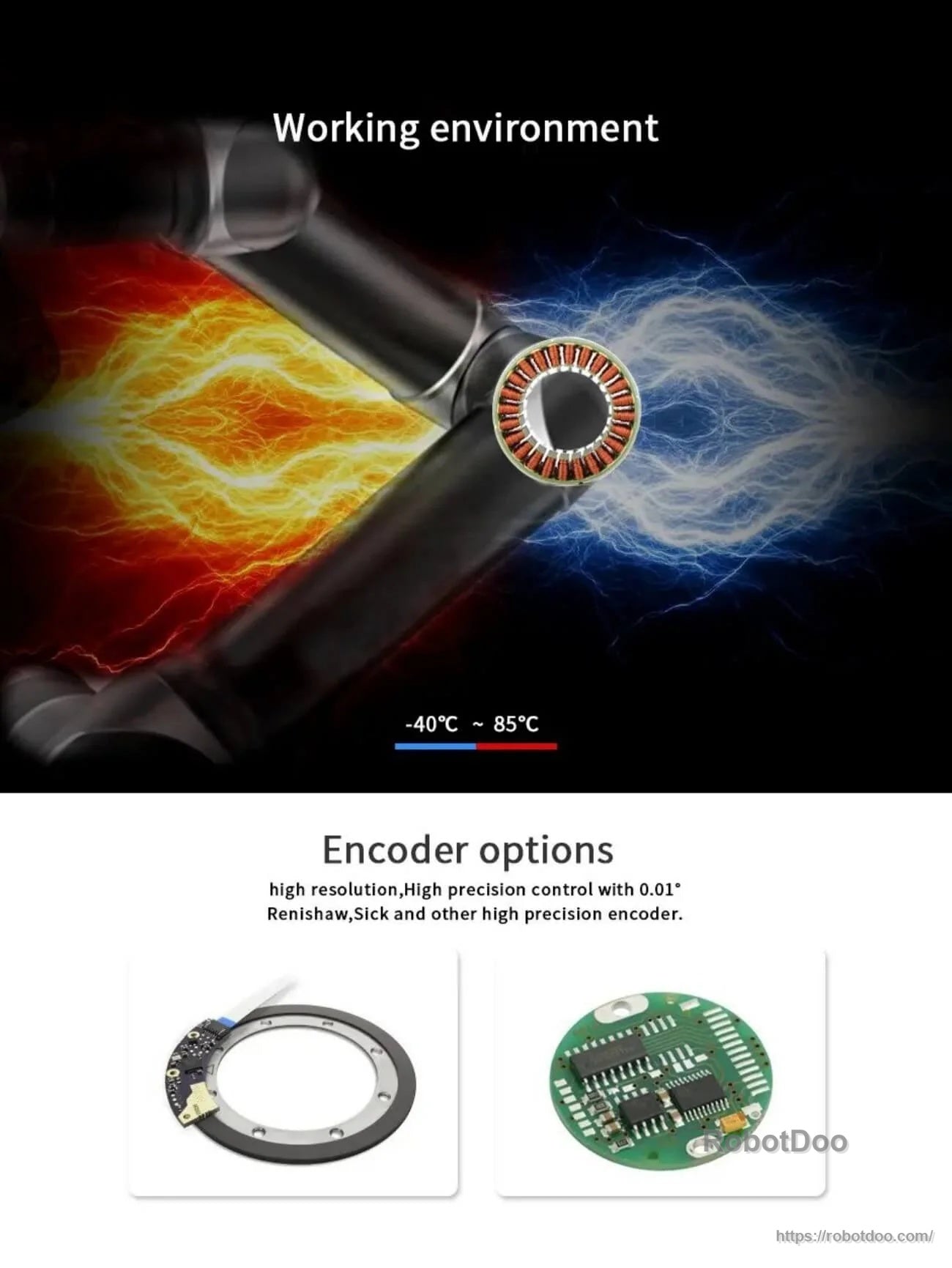
Flexible feedback choices, including high-resolution encoder options, support precise joint control across a wide operating temperature range.
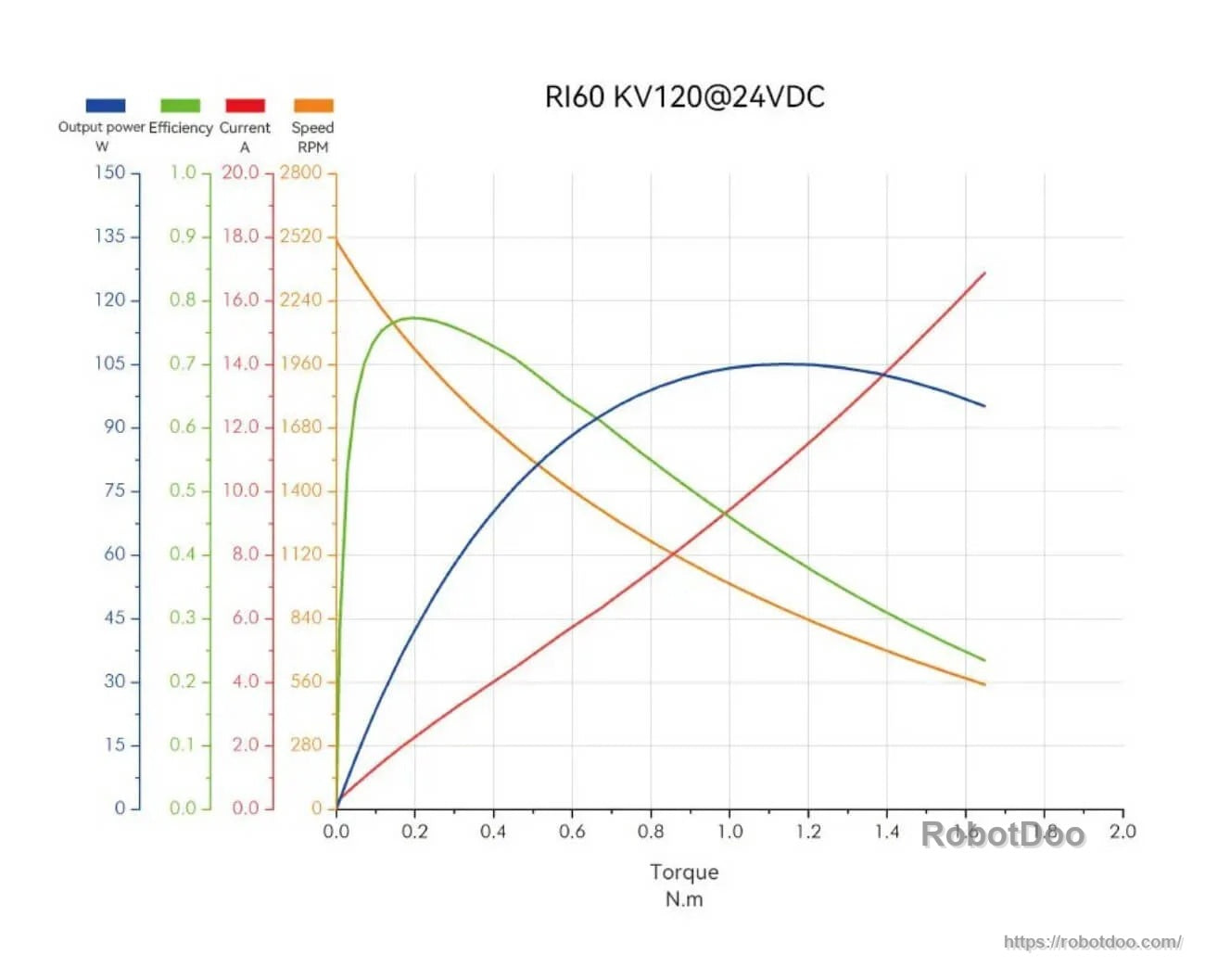
Performance curves at 24 VDC make it easier to size the motor for torque, speed, current, and efficiency targets.