



Overview
CubeMars RI70 Motor is a frameless motor intended for robotics joints and compact actuation modules in humanoid robots, robotic arms, exoskeletons, quadruped robots, AGV vehicles, and ARU robots. It supports FOC (field-oriented control) driving and is specified for 24/36/48 V operation.
Key Features
- Lower cogging torque; smooth running
- Running with low noise; strong dynamic response
- Hand winding for delicate performance: 0.5 mm clearance on the edge of stator for better installation; excellent copper fill factor for high torque density and dynamics
- Curved permanent magnet; BEMF sinus motor design for easy control
- RI70 rotor heightened version: rotor overall height increased by 2 mm to improve sensing when installing a hall sensor
- Encoder options: high resolution; high precision control with 0.01° (Renishaw, Sick, and other high-precision encoder)
Specifications
| Driving Way | FOC |
| Operation Ambient Temperature | -20°C to 50°C |
| Working environment | -40°C to 85°C |
| Winding Type | Delta |
| Pole Pairs | 14 |
| Phase | 3 |
| Rated Voltage (V) | 24/36/48 |
| Rated Power (W) | 125 |
| No-Load Speed (rpm) | 1956/2934/3912 |
| Rated Torque (Nm) | 0.94 |
| Rated Speed (rpm) | 1270/1990/2710 |
| Rated Current (ADC) | 7.1 |
| Peak Torque (Nm) | 2.68 |
| Peak Current (ADC) | 21 |
| Kv (rpm/V) | 95 |
| Kt (Nm/A) | 0.130 |
| Ke (V/krpm) | 11.69 |
| Phase-to-Phase Resistance (mOhm) | 418 |
| Phase-to-Phase Inductance (uH) | 622.7 |
| Inertia (g*cm^2) | 92.15 |
| Km (Nm/sqrt(W)) | 0.2011 |
| Mechanical Time Constant (ms) | 0.23 |
| Electrical Time Constant (ms) | 1.49 |
| Insulation High-Voltage | 1000 V 5 mA/2 s |
| Insulation Resistance | 1000 V 10 MOhm |
| Weight (g) | 270.4 |
| Maximum Torque Weight Ratio (Nm/kg) | 9.91 |
| Size (diameter*length) (mm) | Phi76*24 |
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
Manuals
Details

Built for compact joint modules, the RI70 series targets smooth motion with low cogging torque and low operating noise.

Hand-wound stator coils improve copper fill for higher torque density while keeping a tight 0.5 mm edge clearance for easier integration.

Curved permanent magnets support a sinusoidal BEMF profile designed for stable field-oriented control.

A rotor height increase of 2 mm helps improve Hall sensor sensing when adding position feedback to the module.
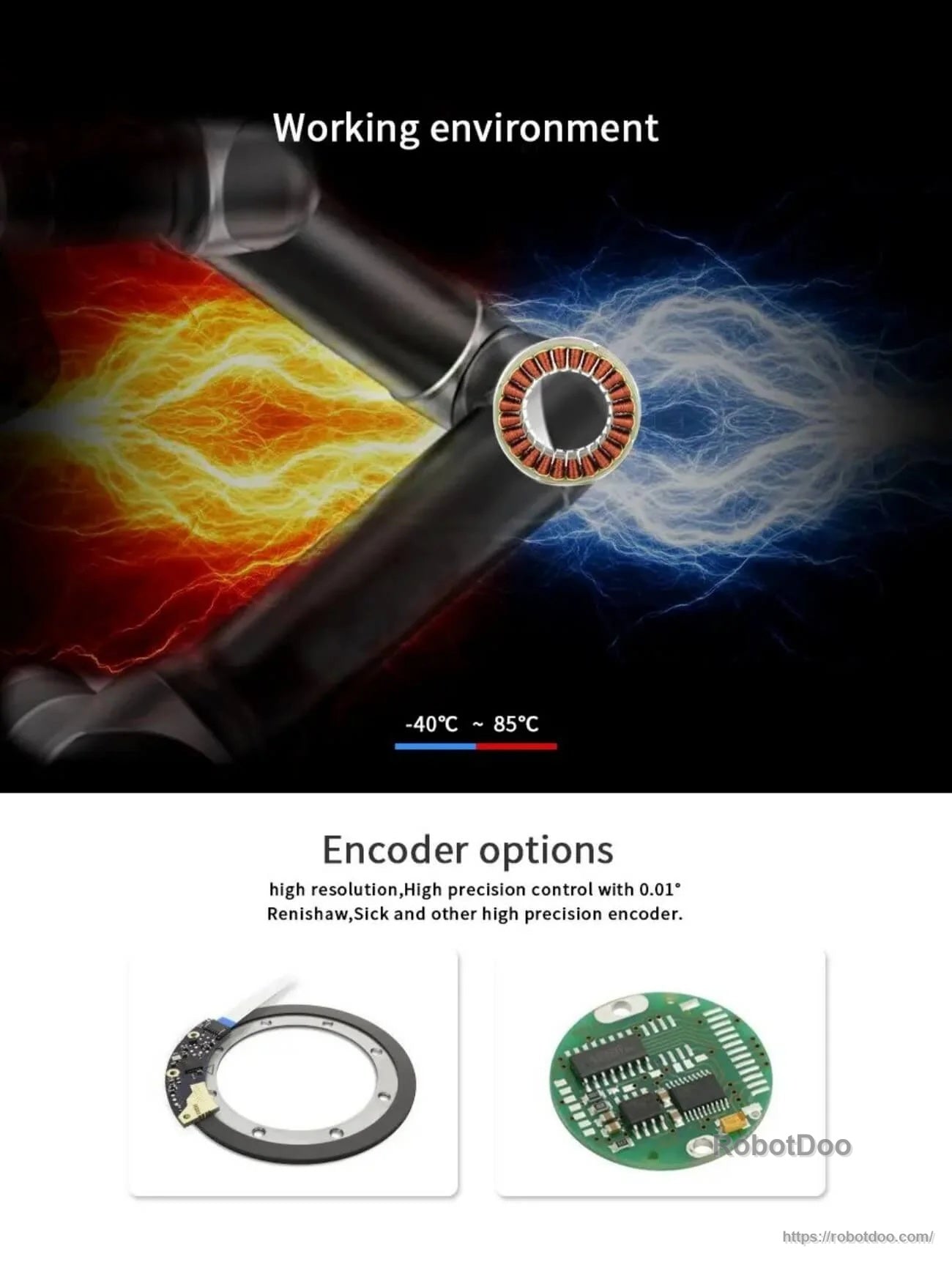
Designed for wide-temperature operation, with encoder options available for high-resolution, high-precision feedback.
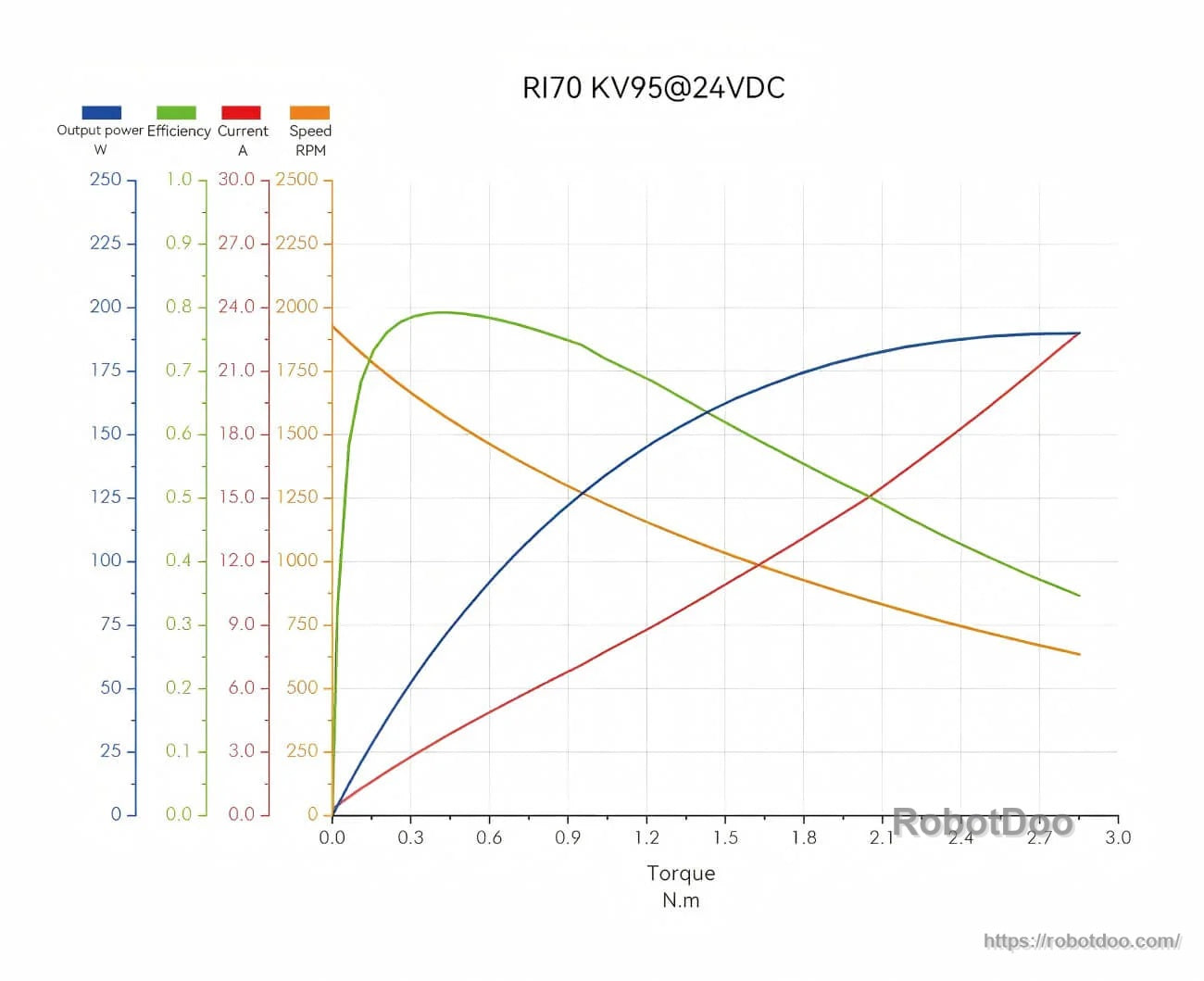
Torque-to-speed, current, power, and efficiency curves support sizing the CubeMars RI70 KV95 Frameless Motor for your drive profile.




