Product Description
The DM-IMU-L1-V1.0 is a compact industrial-grade inertial measurement unit (IMU) designed for robotics, autonomous systems, AGV platforms, motion control, navigation, and industrial automation applications.
Built around the BMI088 MEMS inertial sensor, the module provides calibrated attitude, acceleration, and angular velocity data with integrated temperature control for improved measurement stability. The onboard attitude calculation algorithm outputs roll, pitch, and yaw information directly, simplifying integration into robotic and embedded control systems.
The module supports USB, RS485, and CAN communication interfaces, making it suitable for industrial networks, robotic platforms, autonomous vehicles, balancing systems, and motion sensing applications.
Its compact 36 × 26 × 9 mm enclosure and lightweight design allow easy installation in space-constrained robotic systems while maintaining reliable performance in demanding environments.
Key Features
- BMI088 high-performance MEMS IMU
- Integrated attitude calculation output
- Roll, pitch, and yaw measurement
- Built-in temperature control stabilization
- CAN bus communication
- RS485 communication
- USB interface support
- ±6G accelerometer range
- ±2000°/s gyroscope range
- Adjustable output frequency from 100Hz to 1000Hz
- Compact industrial enclosure
- Lightweight 11.5g design
- Suitable for robotics and autonomous systems
Specifications
| Parameter | Specification |
|---|---|
| Model | DM-IMU-L1-V1.0 |
| Sensor Platform | BMI088 |
| Attitude Output | Roll / Pitch / Yaw |
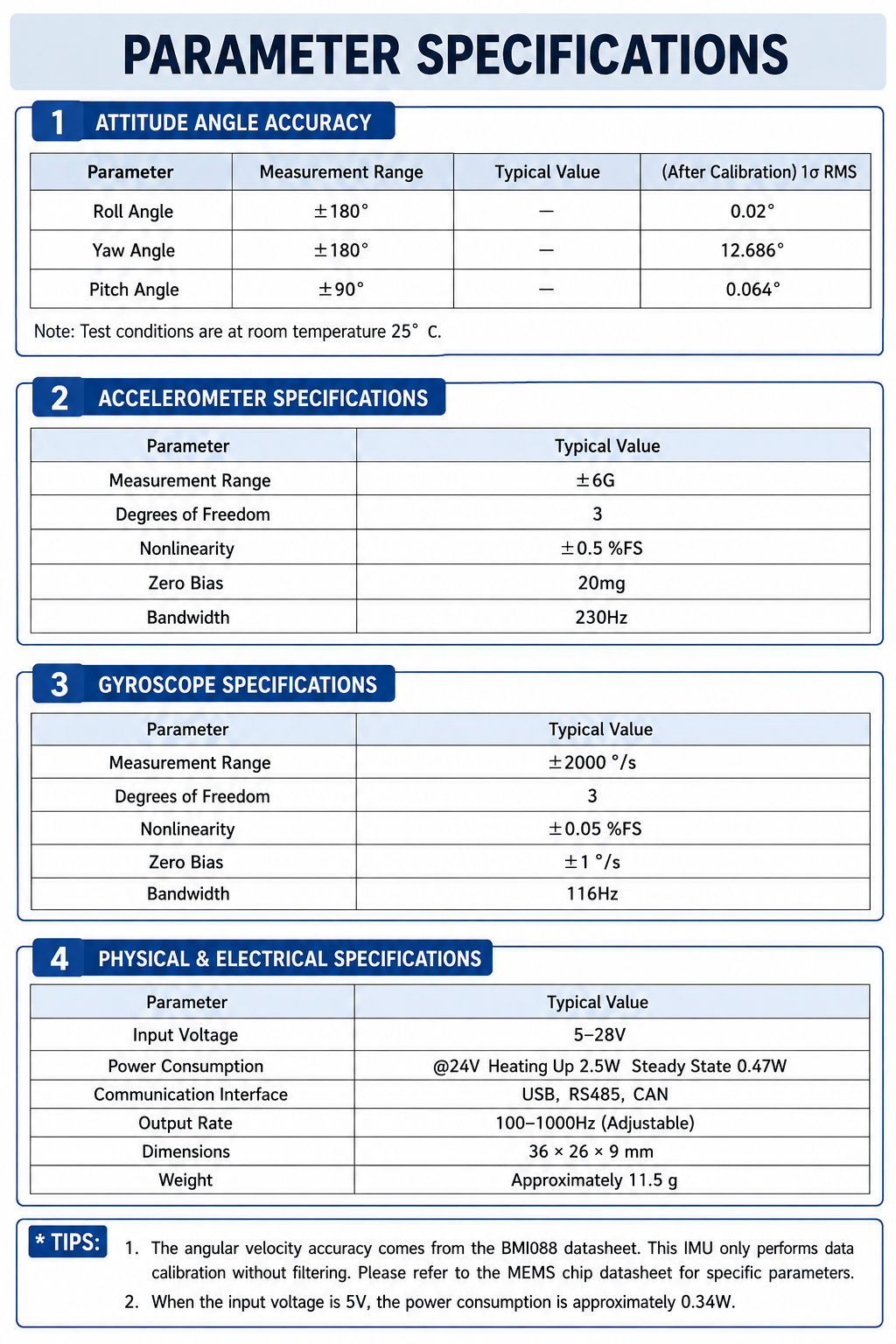
| Roll Range | ±180° |
| Pitch Range | ±90° |
| Yaw Range | ±180° |
| Roll Drift (1 Hour After Calibration) | 0.02° |
| Pitch Drift (1 Hour After Calibration) | 0.064° |
| Yaw Drift (1 Hour After Calibration) | 12.686° |
| Accelerometer Range | ±6G |
| Accelerometer DOF | 3 |
| Accelerometer Non-Linearity | ±0.5% FS |
| Accelerometer Zero Offset | 20mg |
| Accelerometer Bandwidth | 230Hz |
| Gyroscope Range | ±2000°/s |
| Gyroscope DOF | 3 |
| Gyroscope Non-Linearity | ±0.05% FS |
| Gyroscope Zero Offset | ±1°/s |
| Gyroscope Bandwidth | 116Hz |
| Input Voltage | 5V – 28V |
| Communication Interface | USB, RS485, CAN |
| Output Frequency | 100Hz – 1000Hz Adjustable |
| Power Consumption @24V | 2.5W During Heating, 0.47W Stable |
| Power Consumption @5V | Approx. 0.34W |
| Dimensions | 36 × 26 × 9 mm |
| Weight | Approx. 11.5 g |
| Operating Principle | Temperature-Controlled IMU |
Package Includes
- 1 × DM-IMU-L1-V1.0 IMU Module
Applications
- Mobile Robots
- Robotic Arms
- AGV Systems
- AMR Platforms
- Autonomous Vehicles
- Motion Tracking
- Navigation Systems
- Industrial Automation
- Balancing Robots
- Research and Development Projects
- Embedded Control Systems
- Sensor Fusion Applications
SEO FAQ
What is the DM-IMU-L1 IMU module used for?
The DM-IMU-L1 is used for measuring attitude, acceleration, and angular velocity in robotics, autonomous vehicles, industrial automation systems, and navigation applications.
Does the DM-IMU-L1 support CAN communication?
Yes. The module supports CAN bus communication and includes CAN-H and CAN-L interfaces.
Does the IMU support RS485 communication?
Yes. RS485-A and RS485-B interfaces are provided for industrial communication applications.
Which sensor is used inside the module?
The module is based on the BMI088 MEMS inertial sensor platform.
What is the accelerometer measurement range?
The accelerometer range is ±6G.
What is the gyroscope measurement range?
The gyroscope range is ±2000°/s.
Can the output frequency be adjusted?
Yes. Output frequency is adjustable from 100Hz to 1000Hz.
Is the module suitable for robotic navigation?
Yes. The module provides attitude information and inertial measurements suitable for robot navigation, motion control, and stabilization systems.