


Overview
DAMIAO DM-J10422P-2EC Motor is a 48 V gear motor with dual encoders, designed for robotics joints and motion modules in humanoid robots, robotic arms, exoskeletons, quadruped robots, AGV vehicles, and ARU robots. It supports CAN control (up to 5 Mbps) and UART tuning (921600 bps), with MIT Mode / Velocity Mode / Position Mode / Torque Control Mode.
Key Features
- 48 V nominal voltage
- Reduction ratio: 1:22
- Dual encoders (2), 17Bit resolution, ±0.03 degrees accuracy
- Interfaces: CAN@5Mbps (Max) control; UART@921600bps tuning
- Protection functions: driver over-temperature, motor over-temperature, motor over-voltage, communication loss, motor over-current, motor under-voltage
Specifications
| Model | DM-J10422P-2EC |
| Nominal Voltage | 48 V |
| Rated Phase/Source Current | 44.5A / 27.5A |
| Peak Phase/Source Current | 165.0A / 48.9A |
| Rated Torque | 100.0N.M |
| Peak Torque | 400.0N.M |
| Rated Speed | 100 RPM |
| Max. No-load Speed | 120 RPM |
| Slot Number | 36 |
| Pole Pairs | 16 |
| Reduction Ratio | 1:22 |
| Phase Inductance | 38uH (@25°C) |
| Phase Resistance | 81mΩ (@25°C) |
| Bore Size | 12mm |
| Outer Diameter | 110mm |
| Height | 89.9mm |
| Motor Weight | 2700g |
| Encoder Resolution | 17Bit |
| Encoder Accuracy | ±0.03 degrees |
| Number of Encoders | 2 |
| Control Interface | CAN@5Mbps (Max) |
| Tuning Interface | UART@921600bps |
| Control Modes | MIT Mode / Velocity Mode / Position Mode / Torque Control Mode |
| Protection |
Driver over-temperature protection: Protection temperature is 120°C. The motor will exit "Enable Mode" when over-temperature occurs. Motor over-temperature protection: Can be set according to usage requirements. It is recommended not to exceed 100°C (setting above 110°C may burn the coil). The motor will exit "Enable Mode" when over-temperature occurs. Motor over-voltage protection: Can be set according to usage requirements. It is recommended not to exceed 65V. The motor will exit "Enable Mode" when over-voltage occurs. Communication loss protection: The motor will automatically exit "Enable Mode" if no CAN command is received within the set period. Motor over-current protection: Can be set according to usage requirements. It is recommended not to exceed 0.98. The motor will exit "Enable Mode" when over-current occurs. Motor under-voltage protection: If the power supply voltage is lower than the set value, the motor will exit "Enable Mode" (power supply voltage shall not be lower than 20V). |
Performance Curves (text extracted)
Motor Performance Curve At 48V DM10422 80rpm (tor, time(s))
(80,705), (85,615), (90,545), (95,490), (100,440), (105,400), (110,355), (115,320), (120,290), (125,260), (130,235), (135,215), (140,195), (145,175), (150,160), (155,145), (160,130), (165,120), (170,110), (175,100), (180,95), (185,85), (190,80), (195,70), (200,65)
Motor Performance Curve At 48V DM10422 60rpm (tor, time(s))
(80,900), (85,825), (90,720), (95,630), (100,555), (105,495), (110,435), (115,390), (120,345), (125,305), (130,275), (135,245), (140,220), (145,200), (150,180), (155,165), (160,150), (165,135), (170,120), (175,110), (180,100), (185,95), (190,85), (195,80), (200,75)
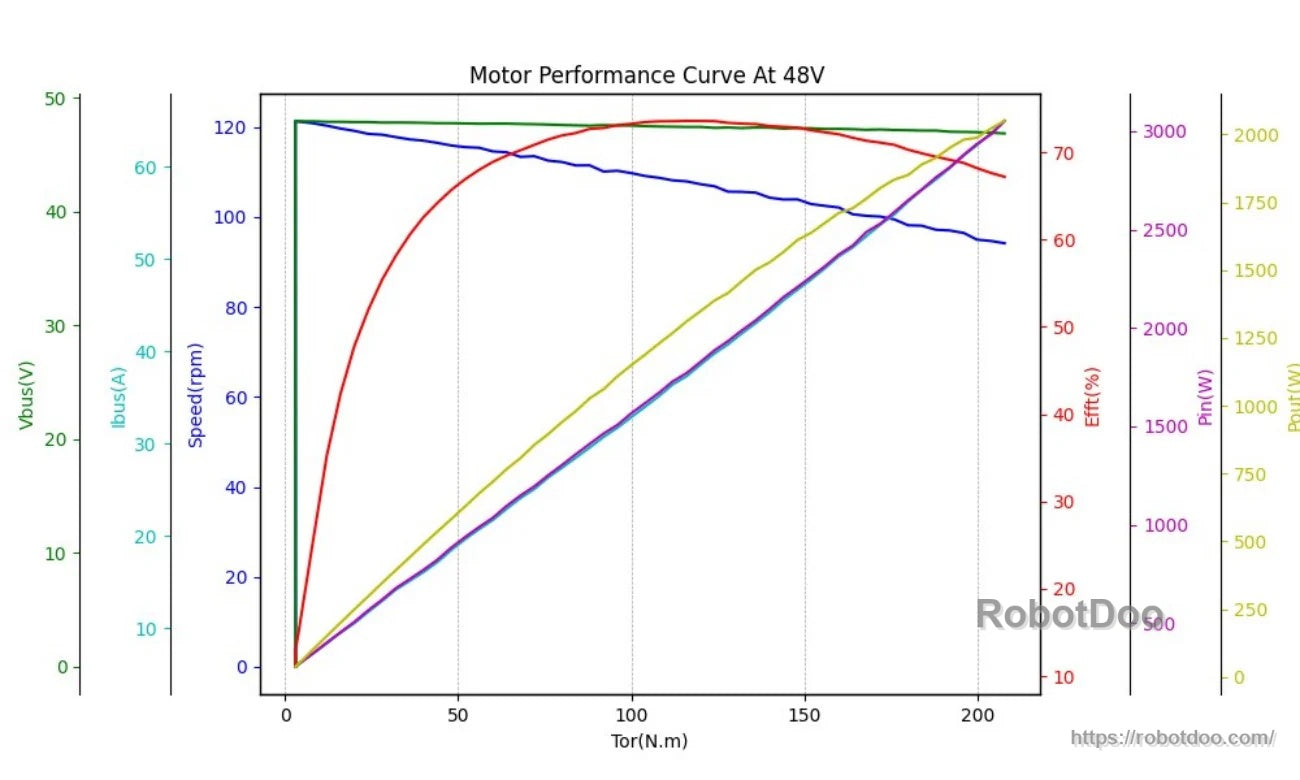
Motor Performance Curve At 48V (plot labels)
- Y-axis labels: Vbus(V), Ibus(A), Speed(rpm), Eff(%), Pin(W), Pout(W)
- X-axis label: Tor(N.m)
Motor Performance Curve At 48V DM10422 100rpm-100Nm (plot labels)
- Y-axis label: motor_temp(°C)
- X-axis label: time(s)
Applications
- Humanoid Robots
- Robotic Arms
- Exoskeletons
- Quadruped Robots
- AGV Vehicles
- ARU Robots
Manuals & Downloads
- DAMIAO_DM_J10422P_2EC_Motor.stp
- DM_J10422P_Product_instalation_drawing.pdf
- USB_to_CANFD_Module_User_Manual_V1.0.pdf
- DAMIAO_DM-J10422P-2EC_motor_User_Manual_V1.0.pdf
- DM-J10422P-2EC_Gear_Motor_User_Manual_V1.1.pdf
- DAMIAO DM-J10422P-2EC V1.1 Motor Instruction Manual (Wiki)
- DAMIAO Host Computer User Manual (Wiki)
Details
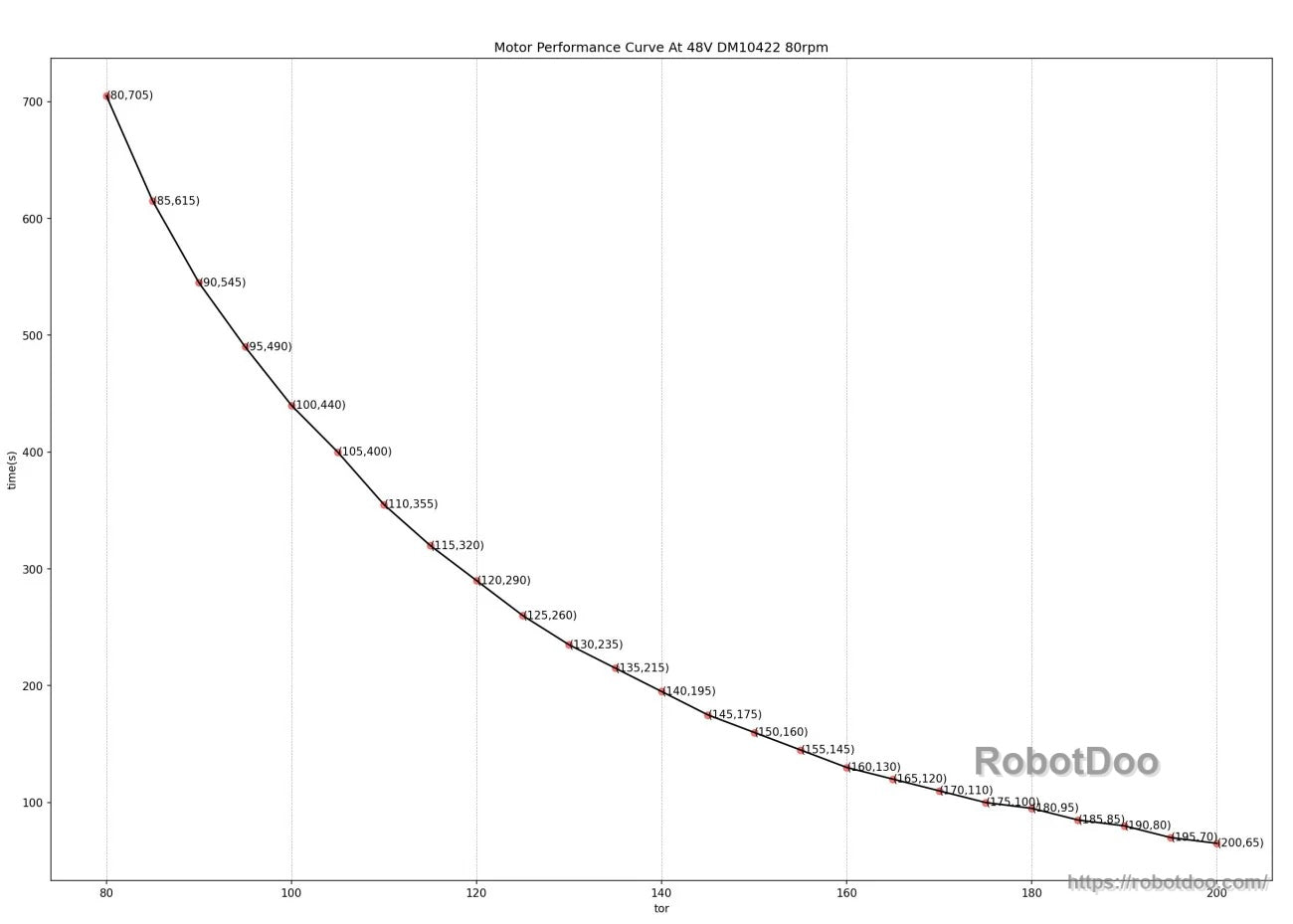
Torque–time curve at 48V for the DM10422 drive profile, useful for estimating sustained load behavior around 80 rpm.
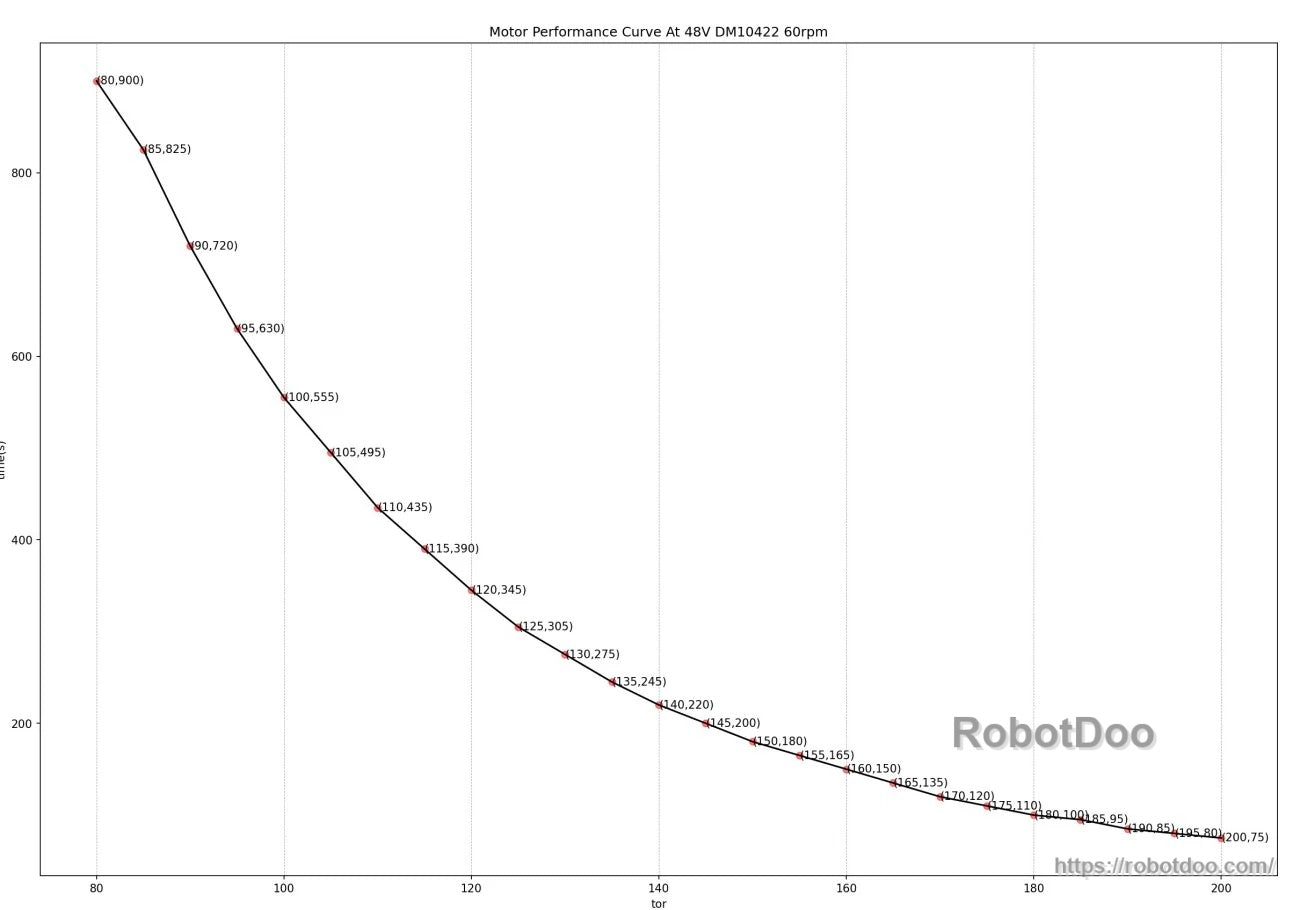
A second 48V torque–time curve is provided at 60 rpm to help compare endurance across speed setpoints.
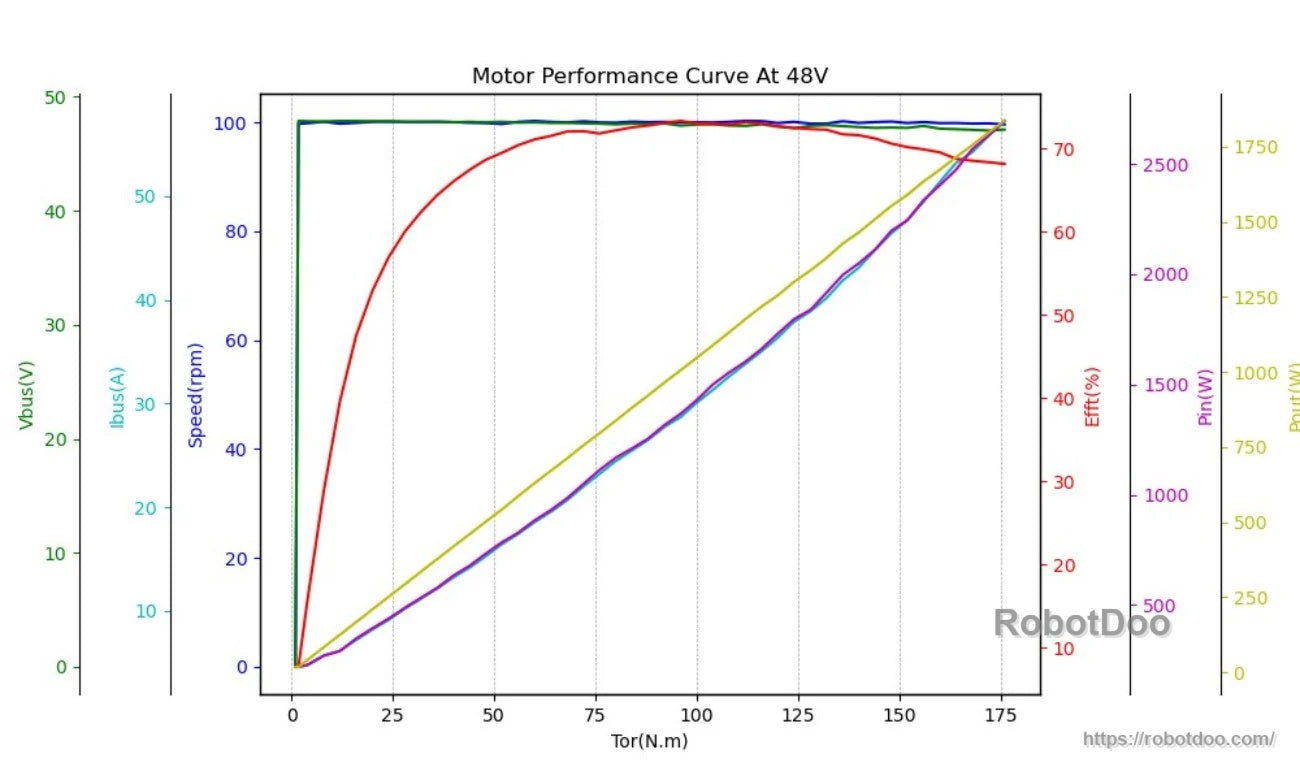
Combined performance plot at 48V summarizes how speed, current draw, efficiency, and output power change with torque.
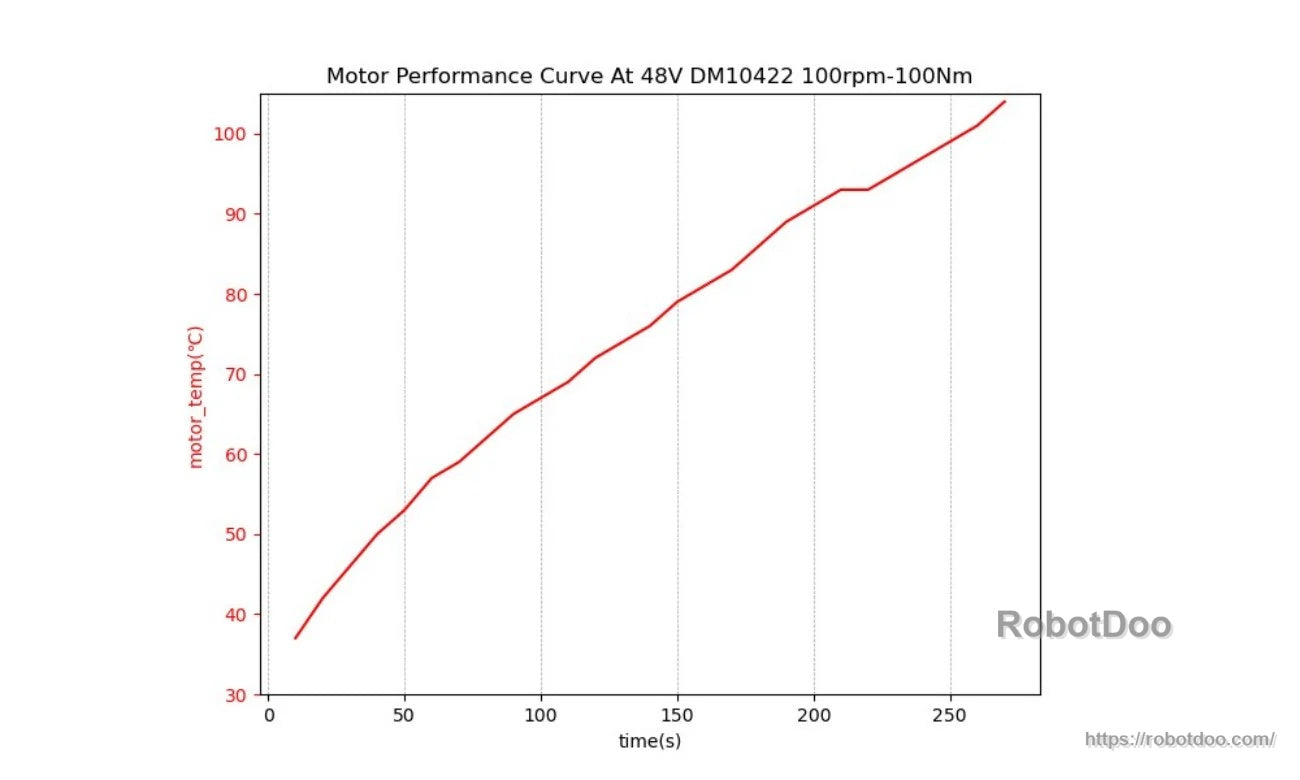
Thermal rise trend at 48V under a 100 rpm / 100 N·m operating point supports cooling and duty-cycle planning.


