Description
The DAMIAO DM-JH11-2EC is a compact harmonic-drive robotic joint module designed for robotic arms, humanoid robots, quadruped robots, exoskeleton systems, and precision automation equipment. Integrating a harmonic reducer, brushless servo motor, and dual inductive encoder feedback system into a single compact actuator, the DM-JH11 delivers high positioning accuracy, low backlash, excellent repeatability, and smooth motion control.
Available in 51:1 and 101:1 reduction ratios, the DM-JH11 series provides different speed and torque characteristics to suit shoulder joints, elbow joints, wrist joints, lightweight industrial robots, and research robotics platforms. The built-in dual inductive encoder architecture enables high-resolution feedback for accurate position and motion control while supporting CAN and CAN FD communication.
Designed for developers seeking a high-performance yet cost-effective robotic actuator, the DM-JH11 combines compact dimensions, integrated construction, and reliable harmonic transmission technology into a professional-grade robotic joint solution.
Key Features
- Integrated harmonic drive robotic joint actuator
- Dual inductive encoder feedback system
- High precision positioning and repeatability
- Low backlash harmonic transmission
- CAN communication support
- CAN FD communication support
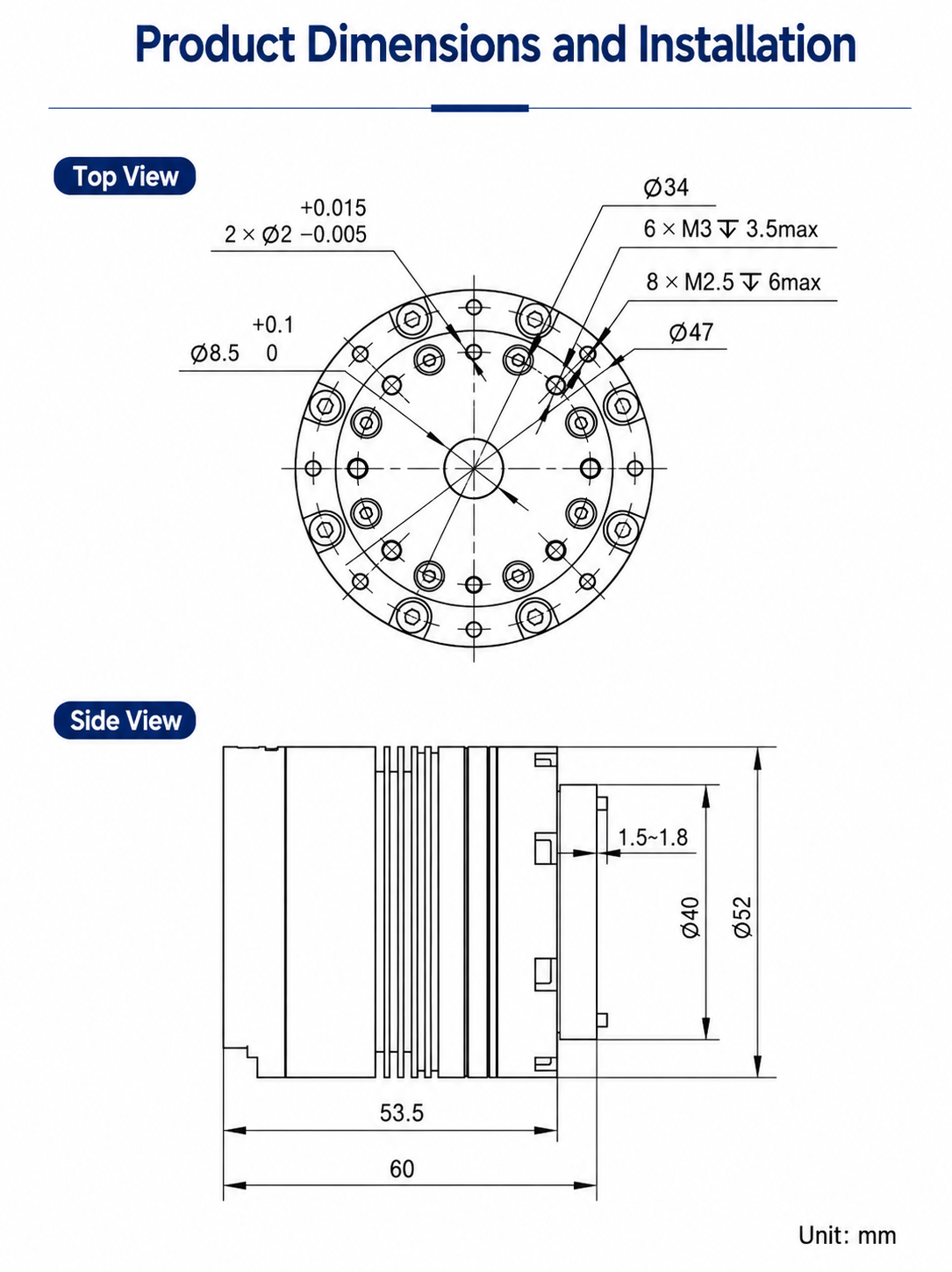
- Compact 52 × 60 mm structure
- Available in 51:1 and 101:1 reduction ratios
- Optimized for robotic arms and humanoid robots
- Smooth motion control and high transmission efficiency
- Wide voltage input range (24–48V)
- Suitable for continuous robotic operation
Specifications

Applications
- Humanoid Robots
- Robotic Arms
- Robot Joint Actuators
- Exoskeleton Systems
- Quadruped Robots
- Research Robotics
- Service Robots
- Industrial Automation
- Precision Motion Control
- Educational Robotics Platforms
Package Includes
Motor Kit
- 1 × DM-JH11-2EC Harmonic Joint Motor Module
- 1 × SHR 8-Pin Power/CAN Cable
- 1 × SHR 3-Pin Debug Signal Cable
Package contents verified from supplied product images and distributor documentation.
Recommended Variants
DM-JH11-51-2EC
Recommended when higher output speed is required.
Suitable for:
- Robotic wrists
- Lightweight robotic arms
- Fast-moving robot joints
- Mobile robot mechanisms
DM-JH11-101-2EC
Recommended when higher output torque and holding capability are required.
Suitable for:
- Shoulder joints
- Elbow joints
- Humanoid robot joints
- High-load precision actuators
FAQ
What type of encoder does the DM-JH11 use?
The DM-JH11 uses a dual inductive encoder system for high-precision position feedback.
What communication interfaces are supported?
The module supports CAN and CAN FD communication protocols.
What is the difference between the 51:1 and 101:1 versions?
The 51:1 version provides higher speed, while the 101:1 version delivers higher torque and stronger holding capability.
Is the actuator suitable for humanoid robots?
Yes. The DM-JH11 is specifically designed for robotic joints including humanoid robots, robotic arms, and exoskeleton systems.
Does the actuator include a harmonic reducer?
Yes. The DM-JH11 integrates a harmonic drive transmission inside the actuator assembly.