Description
The DAMIAO DM-S2325-1EC is a compact high-performance brushless planetary servo motor system consisting of a DM-S2325 gear motor and DM3520-1EC external servo driver. Designed for AGVs, robotic arms, mobile robots, exoskeletons, quadruped robots, and industrial automation equipment, it combines a high-efficiency FOC brushless motor, planetary gearbox, incremental encoder, and CAN/CAN FD communication into a lightweight motion-control solution.
Featuring a 1:25 planetary reduction ratio, the system delivers 1.35Nm rated torque and up to 5Nm peak torque while maintaining compact dimensions and low weight. The controller supports MIT Mode, Position Mode, and Speed Mode, enabling precise closed-loop control for advanced robotics applications.
Key Features
- Brushless DC servo motor with planetary gearbox
- External FOC servo driver included
- 1:25 planetary reduction ratio
- Incremental encoder feedback
- CAN Bus communication
- FD CAN communication support
- MIT Control Mode
- Position Control Mode
- Speed Control Mode
- Compact lightweight structure
- AGV and robotics optimized
- High torque-to-size ratio
- UART parameter configuration interface
Specifications
| Parameter | Value |
|---|---|
| Model | DM-S2325-1EC |
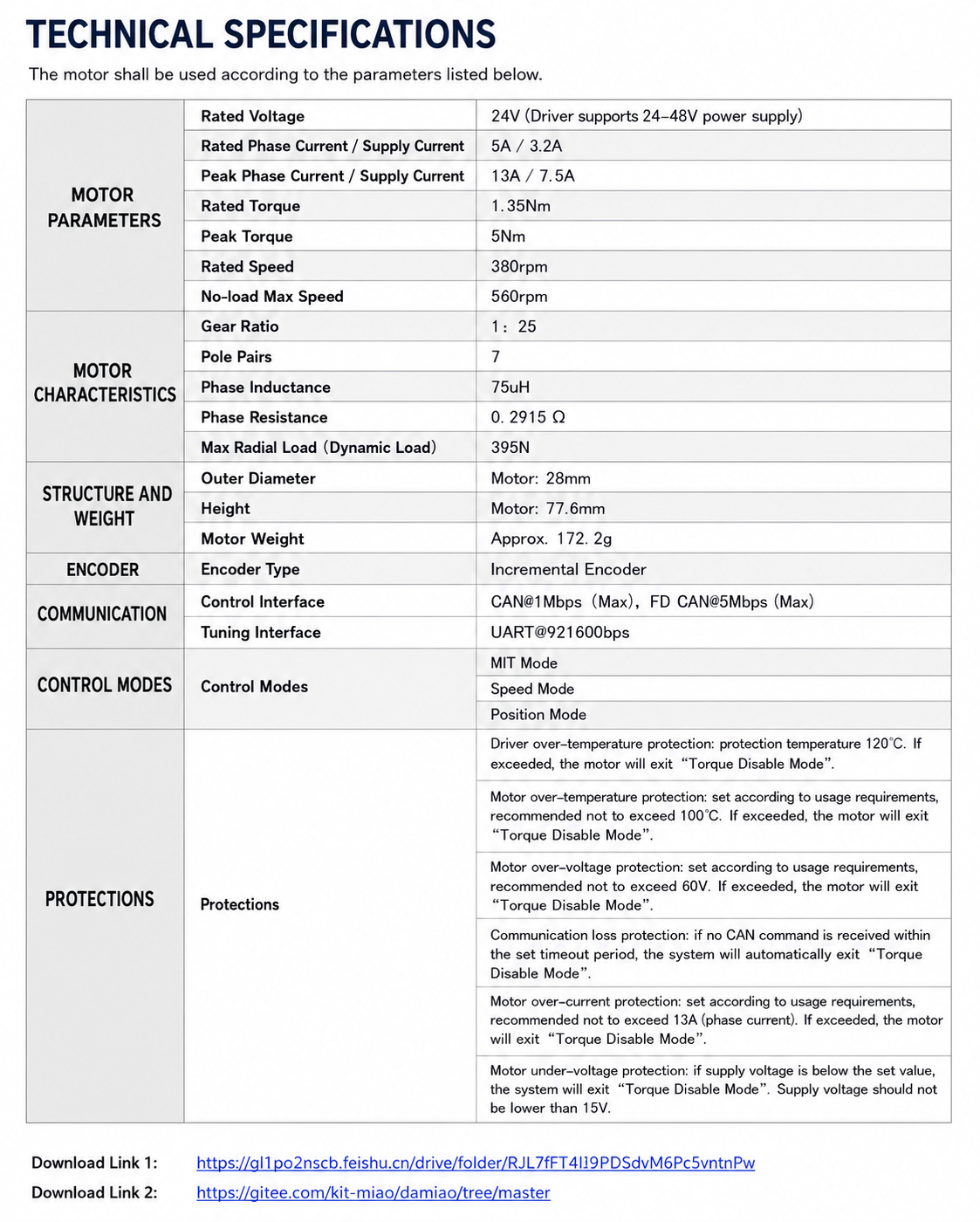
| Rated Voltage | 24V |
| Driver Input Voltage | 24V–48V |
| Rated Phase / Supply Current | 5A / 3.2A |
| Peak Phase / Supply Current | 13A / 7.5A |
| Rated Torque | 1.35 Nm |
| Peak Torque | 5 Nm |
| Rated Speed | 380 RPM |
| No-Load Max Speed | 560 RPM |
| Reduction Ratio | 1:25 |
| Pole Pairs | 7 |
| Phase Inductance | 75 μH |
| Phase Resistance | 0.2915 Ω |
| Maximum Radial Load | 395 N |
| Encoder Type | Incremental Encoder |
| Communication Interface | CAN @ 1 Mbps |
| FD CAN Interface | Up to 5 Mbps |
| Debug Interface | UART @ 921600 bps |
| Motor Diameter | 28 mm |
| Motor Length | 77.6 mm |
| Weight | Approx. 172.2 g |
Technical specifications are consistent with DAMIAO DM-2325 public documentation and commercial listings.
Control Modes
| Mode | Description |
|---|---|
| MIT Mode | Torque, velocity and position hybrid control |
| Speed Mode | Closed-loop speed control |
| Position Mode | Closed-loop position control |
Communication Interfaces
| Interface | Specification |
|---|---|
| CAN Bus | Up to 1 Mbps |
| FD CAN | Up to 5 Mbps |
| UART | 921600 bps |
Protection Functions
| Protection | Description |
|---|---|
| Driver Over-Temperature | Protection threshold 120°C |
| Motor Over-Temperature | Recommended below 100°C |
| Over-Voltage Protection | Recommended below 60V |
| Under-Voltage Protection | Minimum 15V |
| Over-Current Protection | Recommended below 13A |
| Communication Loss Protection | Automatic disable when CAN communication is lost |
Mechanical Specifications
Motor
| Item | Value |
|---|---|
| Diameter | 28 mm |
| Total Length | 77.6 mm |
| Output Shaft Diameter | 5 mm |
| Weight | 172.2 g |
Driver
| Item | Value |
|---|---|
| Driver Model | DM3520-1EC |
| Driver Width | 32 mm |
| Driver Length | 62 mm |
| Driver Thickness | 12 mm |
Package Includes
Motor + Driver Kit
- 1 × DM-S2325-1EC Planetary Servo Motor
- 1 × DM3520-1EC Servo Driver
- 1 × GH1.25 3-Pin UART Cable (300 mm)
- 1 × GH1.25 2-Pin CAN Cable (300 mm)
- 1 × XT30 Power Cable (200 mm)
Applications
- AGV Robots
- AMR Mobile Robots
- Robotic Arms
- Humanoid Robots
- Exoskeleton Systems
- Quadruped Robots
- Industrial Automation
- Smart Manufacturing Equipment
- Autonomous Platforms
- Research and Education Robotics
The DM-2325 platform is specifically positioned for robotic joints, exoskeletons, AGVs, quadruped robots, and robotic arm systems.
Advantages
- Compact 28mm planetary servo solution
- High 5Nm peak torque output
- CAN and CAN FD communication
- Lightweight design for mobile robots
- Integrated encoder feedback
- Wide-voltage driver support
- High precision FOC control
- Suitable for ROS and custom robotics platforms
FAQ
Is the driver included?
Yes. This version includes the DM3520-1EC external servo driver.
Does it support CAN FD?
Yes. CAN communication up to 1 Mbps and FD CAN communication up to 5 Mbps are supported.
What control modes are available?
MIT Mode, Position Mode, and Speed Mode.
Is an encoder built in?
Yes. The motor includes an incremental encoder for closed-loop control.
What is the peak torque?
The peak output torque is 5 Nm.
Is this suitable for AGV robots?
Yes. It is designed for AGVs, mobile robots, robotic arms, exoskeletons, and quadruped robots.