



Overview
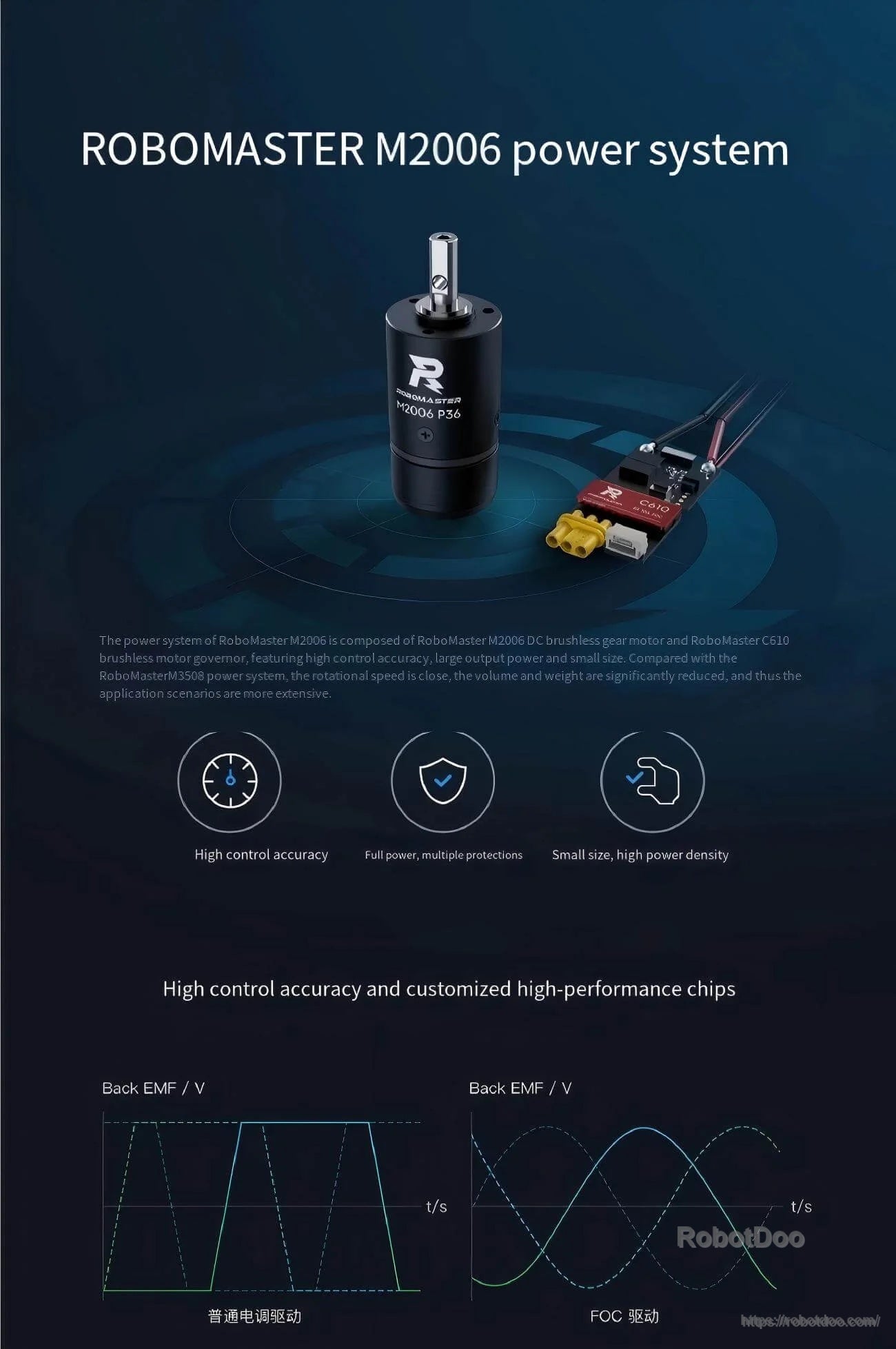
The DJI RoboMaster M2006 P36 is a brushless DC gear motor designed for compact robotic drive and joint actuation. It is used in the RoboMaster M2006 power system together with the RoboMaster C610 motor controller, and performance data is also provided when driven by a Z650 ESC at the rated voltage. The motor is described as compact, light, and suitable for applications requiring accurate feedback and control.
The M2006 P36 DC brushless gear motor is equipped with a built-in rotor position sensor for accurate position feedback. When used with the RoboMaster C610 motor controller, vector control (FOC) is applied to enable continuous and linear torque for more sensitive and precise control. The RoboMaster C610 motor controller is described as using a DJI custom 32-bit motor control chip and integrating a power management system, master control, and drive system.
Key Features
- Built-in rotor position sensor for accurate position feedback
- Supports vector control (FOC) operation when used with the RoboMaster C610 motor controller
- Compact size and light weight
- Protection functions referenced for the RoboMaster C610 motor governor: overvoltage, disconnection, and locked rotor
Specifications
| Item Name | DJI RoboMaster M2006 P36 |
| Using C610 Speed Controlled at rated voltage | |
| No-Load Speed | 500 rpm |
| No-Load Current | 0.6 A |
| Rated Rotational Speed | 416 rpm |
| Rated Torque (max continuous torque) | 1 N*m |
| Rated Current | 3 A |
| Max Efficiency | 66% |
| Using Z650 ESC at the rated voltage | |
| Rotational Speed (without payload) | 777 rpm |
| Current (without payload) | 0.8 A |
| Rated Rotational Speed | 555 rpm |
| Rated Torque (max continuous torque) | 0.8 N*m |
| Rated Current (max continuous line current) | 3.7 A |
| Max Efficiency | 66% |
| Stall Torque | 7 N*m |
| Stall Current | 27.3 A |
| Characteristic Parameters | |
| Rated Voltage | 24 V |
| Torque Constant | 0.18 N*m/A |
| Speed Constant | 32.96 rpm/V |
| Speed/Torque Gradient | 110 rpm/N*m |
| Mechanical Time Constant | 52.78 ms |
| Phase Resistance | 461 mOhm |
| Phase Inductance | 64.22 uH |
| Operating Temperature Range | 0-55 °C |
| Number of Pole Pairs | 7 |
| Weight | 90 g |
| Reduction Ratio | 36:1 |
| Additional figures stated for the RoboMaster M2006 power system | |
| Maximum rotational speed at output end | up to 500 rpm |
| Maximum continuous torque | 1000 mN*m |
| Maximum continuous output power | 44 W |
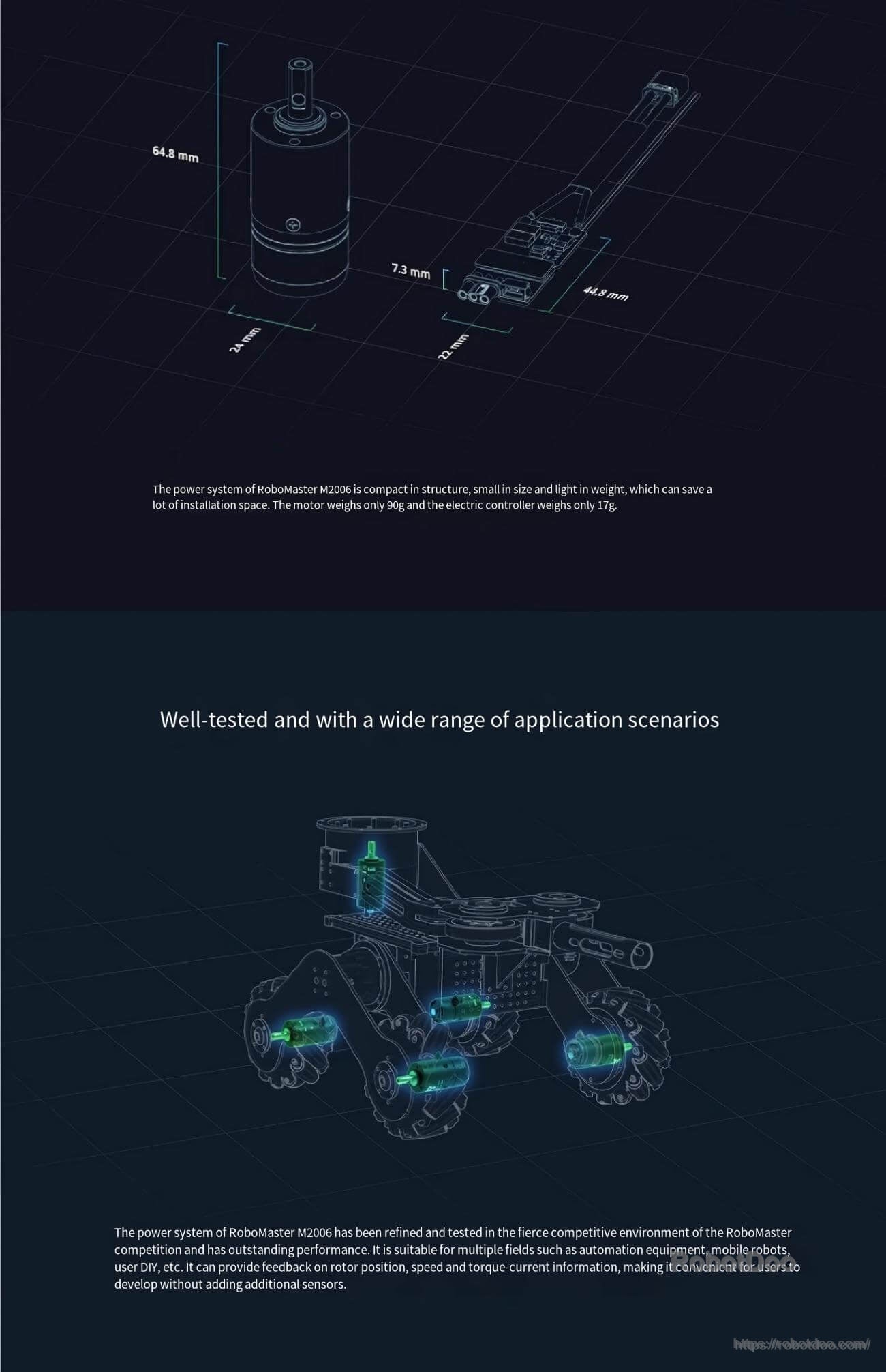
| Motor weight (stated) | 90 g |
| Electric controller weight (stated) | 17 g |
| Dimensions shown | |
| Motor dimension labels | 64.8 mm; 24 mm |
| Controller/cable dimension labels | 344.8 mm; 22 mm; 7.3 mm |
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
- Automation equipment
- Mobile robots
- User DIY
Manuals
- DJI_RoboMaster_M2006_P36_Brushless_DC_Gear_Motor.stp
- DJI_RoboMaster_C610_Brushless_Motor_Controller.stp
- RM_M2006_P36-INSTALLATION_DRAWING.pdf
Details
Pairing the M2006 P36 gear motor with the C610 controller enables rotor-position feedback and smooth FOC torque control for compact robot joints.

Power and speed curves help size the M2006 power system while the controller protections support more reliable operation under load.
Compact motor and controller dimensions make integration easier in tight builds such as robotic arms, humanoid joints, and small AGV drivetrains.




