Product Overview
The GIM3505-8 is a compact integrated planetary gear motor designed for robotic joints and precision motion control. It features a built-in 1:8 reduction gearbox, supports CAN communication, and offers flexible configurations including bare motor, encoder, and driver options.
This actuator is ideal for quadruped robots, robotic arms, and compact automation systems.
Key Features
- Integrated planetary gearbox (1:8 reduction)
- Compact design with high torque density
- CAN communication supported
- Multiple configurations (motor / encoder / driver)
- Encoder support for precise positioning
- Low noise operation (<60 dB)
Technical Specifications
| Parameter | Value |
|---|---|
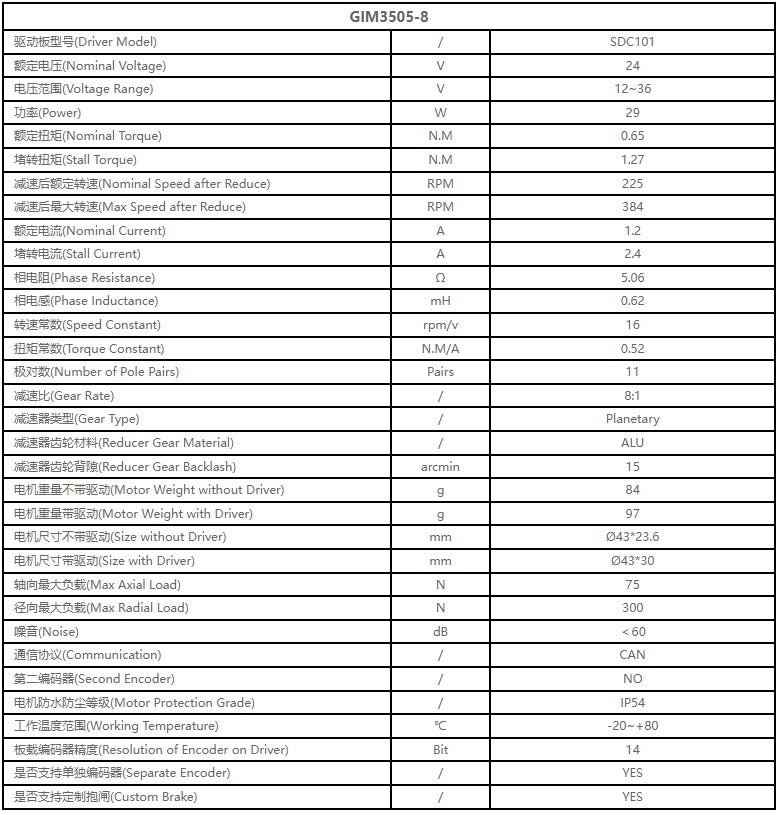
| Model | GIM3505-8 |
| Driver Model | SDC101 |
| Nominal Voltage | 24V |
| Voltage Range | 12–36V |
| Power | 29W |
| Nominal Torque | 0.65 Nm |
| Stall Torque | 1.27 Nm |
| Nominal Speed (After Reduction) | 225 RPM |
| Max Speed (After Reduction) | 384 RPM |
| Nominal Current | 1.2 A |
| Stall Current | 2.4 A |
| Phase Resistance | 5.06 Ω |
| Phase Inductance | 0.62 mH |
| Speed Constant | 16 rpm/V |
| Torque Constant | 0.52 Nm/A |
| Pole Pairs | 11 |
| Gear Ratio | 8:1 |
| Gear Type | Planetary |
| Gear Material | Aluminum |
| Backlash | 15 arcmin |
| Weight (Without Driver) | 84 g |
| Weight (With Driver) | 97 g |
| Size (Without Driver) | Ø43 × 23.6 mm |
| Size (With Driver) | Ø43 × 30 mm |
| Max Axial Load | 75 N |
| Max Radial Load | 300 N |
| Noise | <60 dB |
| Communication | CAN |
| Encoder Resolution | 14-bit |
| Protection Grade | IP54 |
| Working Temperature | -20°C ~ +80°C |
| Separate Encoder | YES |
| Custom Brake | YES |

Package Includes
Bare Motor Versions
- GIM3505-8 Motor ×1
Encoder Version
- GIM3505-8 Motor ×1
- 5047 Encoder ×1
Driver Versions
- GIM3505-8 Motor ×1
- Driver Board (GDS343 or GDZ34) ×1
Applications
- Robotic joints (arms, legs)
- Quadruped robots
- Humanoid robots
- Industrial automation
- Precision positioning systems