

Overview
The HIGH TORQUE HTDW-4438-30-NE is a compact high-torque motor module designed for robotic joint and motion applications. It integrates a 30 reduction ratio and 14-bit encoders (input and output) to support controlled low-speed, high-torque operation in platforms such as humanoid robots, robotic arms, and mobile robots.
Key Features
- Reduction ratio: 30
- Low backlash and positioning performance: backlash <10 Arcmin; repeat positioning accuracy <12 Arcmin; absolute positioning accuracy <15 Arcmin
- Dual encoder feedback: input encoder resolution 14-bit; output encoder resolution 14-bit
- Control/communication parameters: control frequency 3 kHz; response time ≤200 us; baud rate 5 Mbps
- Electrical ratings: voltage range 12-48 V; rated current 1 A; peak current 5 A; rating 6 W
Specifications
| Model | HTDW-4438-30-NE |
| Length and Width | 44mm |
| Height | 40mm |
| Weight | 194g |
| Backlash | <10Arcmin |
| Repeat Positioning Accuracy | <12Arcmin |
| Absolute Positioning Accuracy | <15Arcmin |
| Torque Constant | 0.039Nm/A |
| Number of Pole Pairs | 14 |
| Reduction Ratio | 30 |
| Locked-rotor Torque | 10Nm |
| No-load RPM | 75RPM |
| Rated Torque | 2Nm |
| Rated RPM | 45RPM |
| Rating | 6W |
| Voltage Range | 12-48V |
| Peak Current | 5A |
| Rated Current | 1A |
| Speed Control Accuracy | ±10% |
| Control Accuracy | ±20% |
| Response Time | ≤200us |
| Control Frequency | 3kHz |
| Input Encoder Resolution | 14-bit |
| Output Encoder Resolution | 14-bit |
| Baud Rate | 5Mbps |
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
Manuals
- Installation Drawing (PDF)
- HIGH TORQUE Motor Debugging Assistant User Manual (PDF)
- Debugging Manual (PDF)
- FDCAN Protocol Analysis (PDF)
- User Manual (PDF)
3D Model
Details

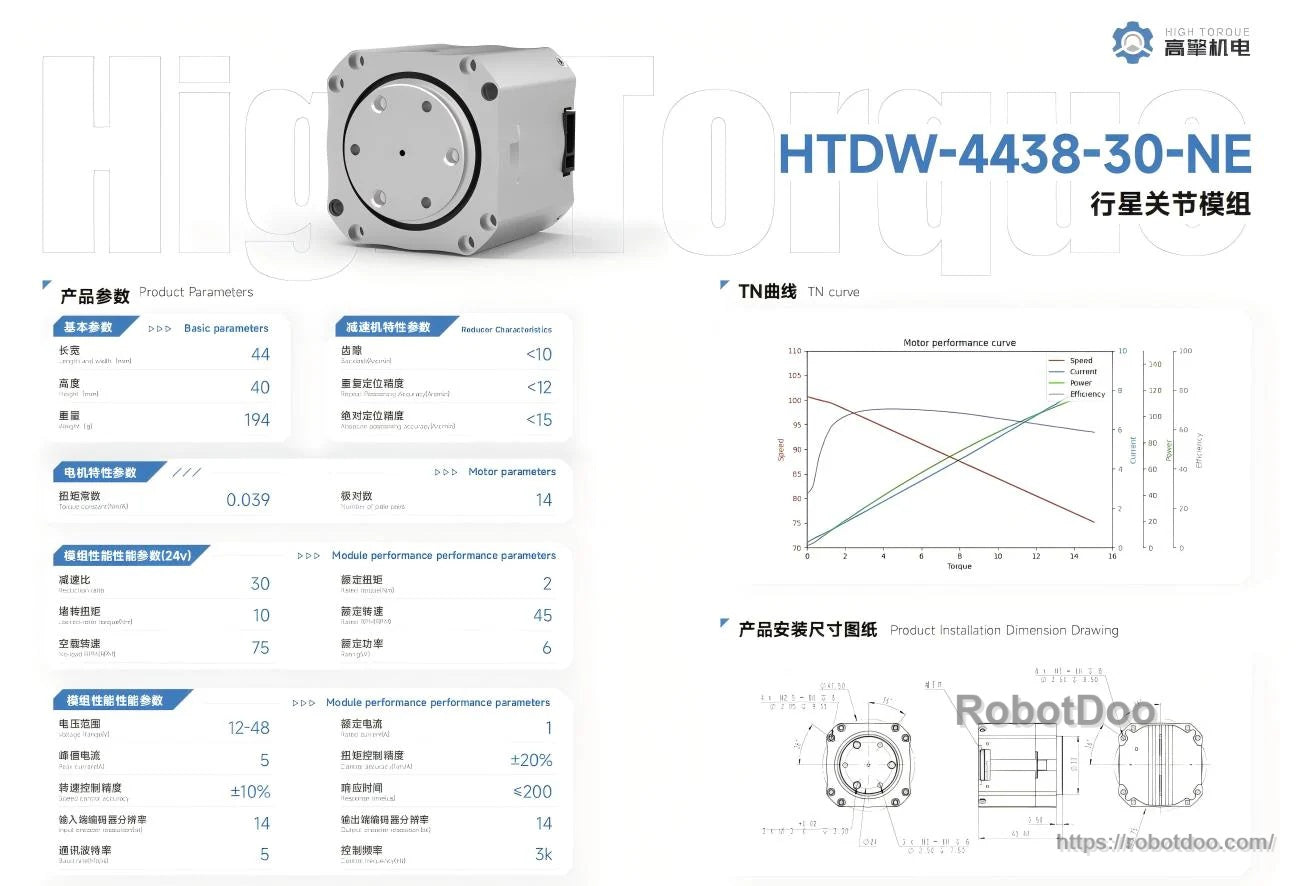
Key parameters, performance curve, and installation dimensions for the HTDW-4438-30-NE module are summarized for quick integration planning.

