Overview
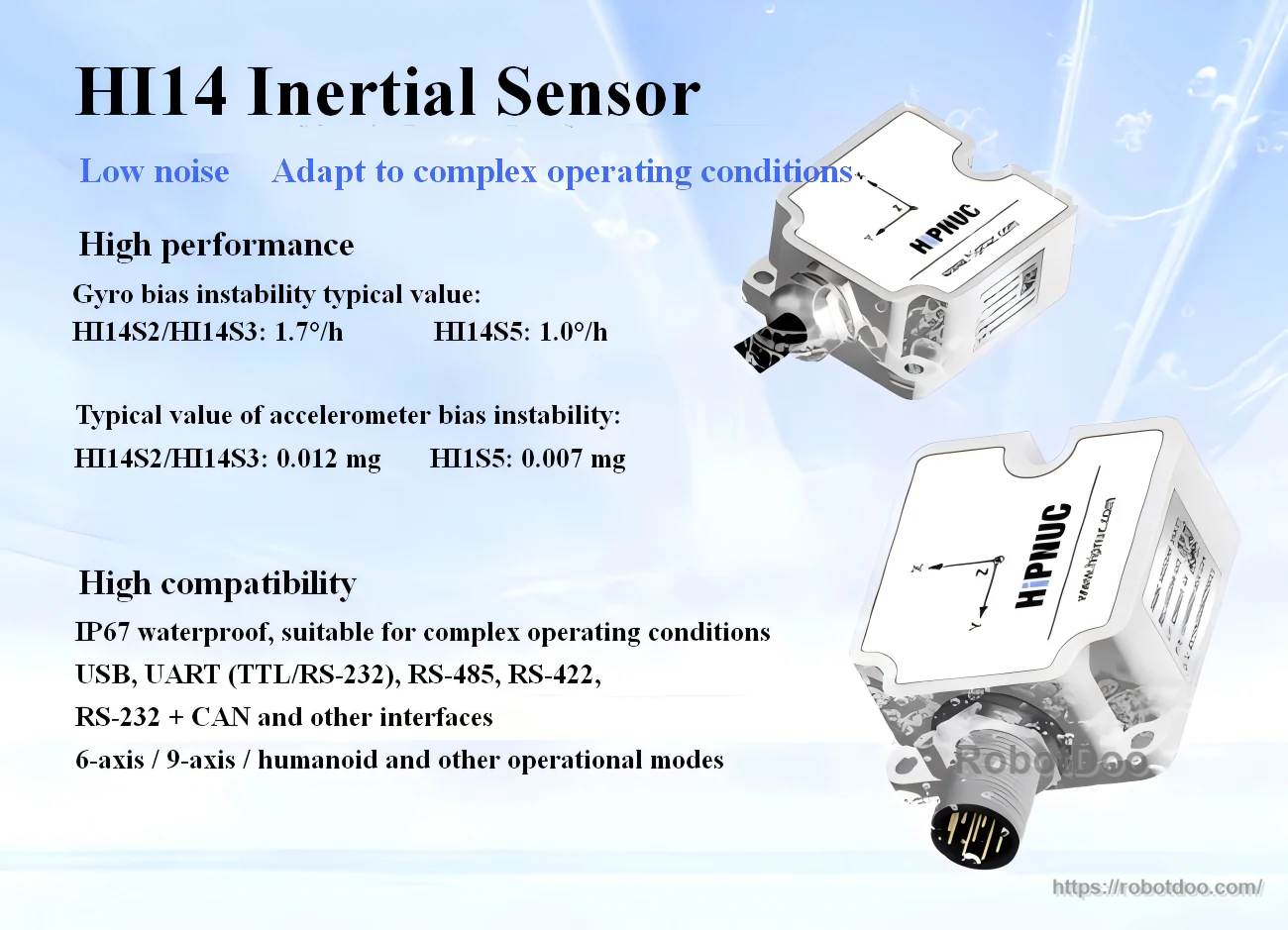
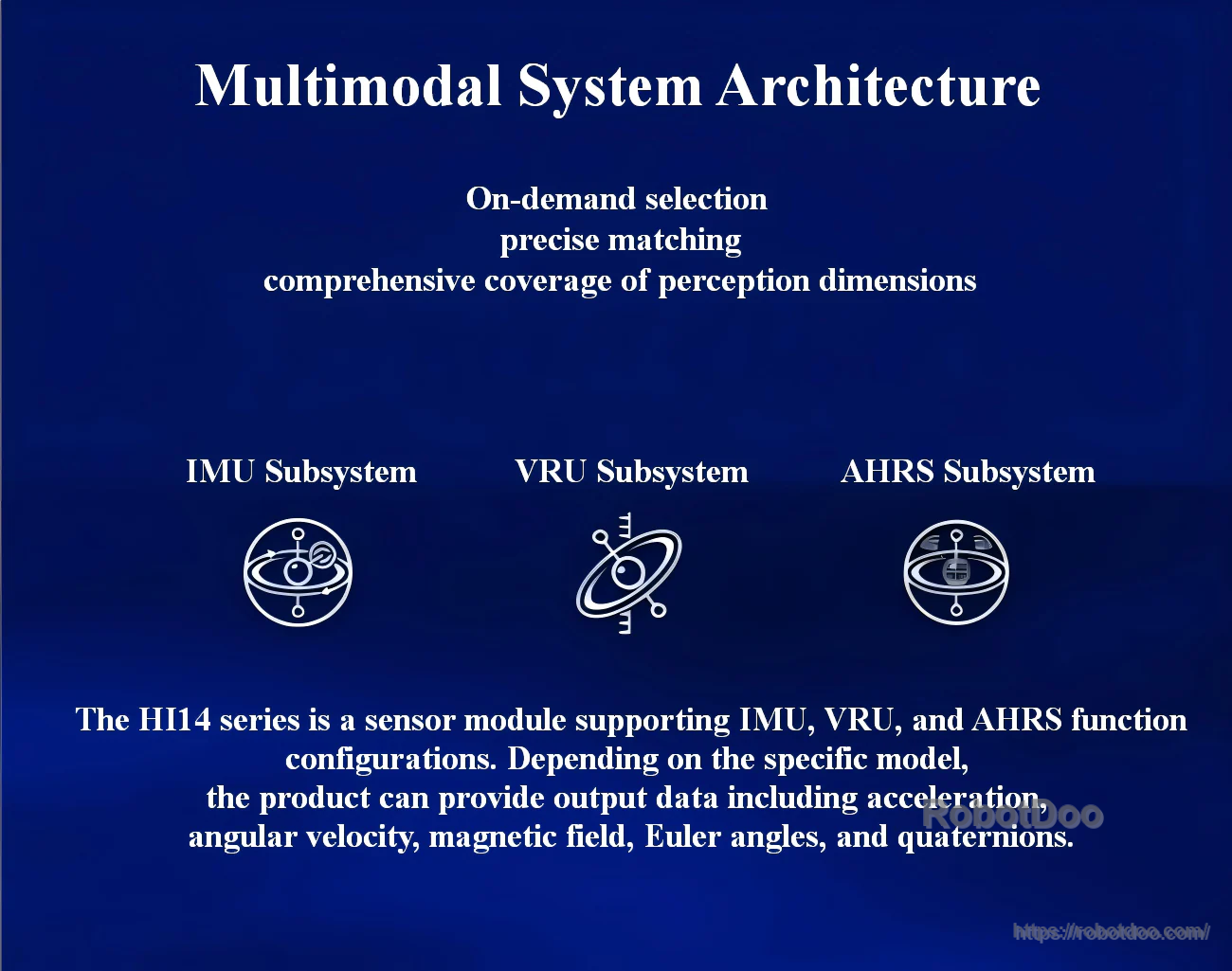
The HiPNUC HI14S Sensor is an inertial sensor module designed for IMU/VRU/AHRS configurations. Depending on the selected model, it can output data including acceleration, angular velocity, magnetic field, Euler angles, and quaternions. It is rated IP67 waterproof and is intended for complex operating conditions, with up to 1000 Hz output for low-latency motion sensing.
Key Features
- Low-noise, high-performance inertial sensing
- Up to 1000 Hz output (sampling rate: 1000 Hz)
- Adaptive EKF fusion algorithm
- Supports IMU subsystem, VRU subsystem, and AHRS subsystem configurations
- Multiple interface variants available: USB, UART (TTL/RS-232), RS-485, RS-422, RS-232 + CAN, CAN2.0
- IP67 waterproof, suitable for outdoor, humid, and dusty industrial environments
- 6-axis / 9-axis / humanoid and other operational modes
Specifications
| Gyroscope Measurement Range | ±250 / ±500 / ±1000 / ±2000 / ±4000 °/s (Default: ±2000 °/s) |
| Gyroscope Resolution | 16-20 bit |
| Gyroscope Scale Factor Error | HI14-S2/S3: Typ <600 ppm, Max 1200 ppm HI14-S5: Typ <400 ppm, Max 600 ppm (RMS, @100 °/s) |
| Gyroscope Nonlinearity | ±0.05 %FS |
| Gyroscope Noise Density (10 Hz Bandwidth) | HI14-S2/S3: 0.0025 °/s/sqrt(Hz) HI14-S5: 0.0015 °/s/sqrt(Hz) |
| Gyroscope 3 dB Bandwidth | 80-400 Hz |
| Gyroscope Zero Rate Output | ±0.1 to ±0.2 °/s (RMS) |
| Gyroscope Sampling Rate | 1000 Hz |
| Gyroscope Bias Instability | HI14-S2/S3: X=4.0/6.0 °/h, Y=1.5/2.5 °/h, Z=1.7/4.0 °/h HI14-S5: X=0.9/1.5 °/h, Y=1.1/1.4 °/h, Z=1.0/1.5 °/h |
| Gyroscope Short-term Bias Stability (10 s Averaging) | HI14-S2/S3: X=10.0/16.0 °/h, Y=4.0/7.0 °/h, Z=5.0/13.0 °/h HI14-S5: X=3.1/5.0 °/h, Y=2.9/4.5 °/h, Z=3.0/6.5 °/h |
| Gyroscope Bias Repeatability | HI14-S2/S3: X=11.0/35.0 °/h, Y=10.0/30.0 °/h, Z=9.0/20.0 °/h HI14-S5: X=7.0/18.0 °/h, Y=6.0/19.0 °/h, Z=6.0/13.0 °/h |
| Gyroscope Angle Random Walk | HI14-S2/S3: X=0.12/0.16 °/sqrt(h), Y=0.10/0.12 °/sqrt(h), Z=0.10/0.14 °/sqrt(h) HI14-S5: X=0.055/0.070 °/sqrt(h), Y=0.057/0.070 °/sqrt(h), Z=0.059/0.070 °/sqrt(h) |
| Gyroscope Full Temperature Bias Drift (-40 °C to 85 °C) | 0.07-0.15 °/s |
| Gyroscope G-Sensitivity | 0.05 °/s/g (X/Y/Z Axis) |
| Accelerometer Measurement Range | ±2 / ±8 / ±16 / ±32 g (Default: ±16 g) |
| Accelerometer Resolution | 16-20 bit |
| Accelerometer Initial Zero Bias | 1-2 mg (RMS) |
| Accelerometer Nonlinearity | ±0.01 %FS |
| Accelerometer Noise Density (10 Hz Bandwidth) | HI14-S2/S3: 0.050-0.070 mg/sqrt(Hz) HI14-S5: 0.030-0.045 mg/sqrt(Hz) |
| Accelerometer 3 dB Bandwidth | 90-400 Hz |
| Accelerometer Sampling Rate | 1000 Hz |
| Accelerometer Bias Instability | HI14-S2/S3: X=0.012/0.020 mg, Y=0.009/0.015 mg, Z=0.016/0.022 mg HI14-S5: X=0.0045/0.0060 mg, Y=0.0065/0.0090 mg, Z=0.010/0.014 mg |
| Accelerometer Short-term Bias Stability (10 s Averaging) | HI14-S2/S3: X=0.032/0.055 mg, Y=0.022/0.032 mg, Z=0.048/0.082 mg HI14-S5: X=0.011/0.015 mg, Y=0.018/0.023 mg, Z=0.030/0.050 mg |
| Accelerometer Bias Repeatability | HI14-S2/S3: X=0.10/0.30 mg, Y=0.06/0.20 mg, Z=0.10/0.20 mg HI14-S5: X=0.06/0.18 mg, Y=0.04/0.125 mg, Z=0.06/0.125 mg |
| Accelerometer Velocity Random Walk | HI14-S2/S3: 0.019-0.030 m/s/sqrt(h) HI14-S5: 0.010-0.012 m/s/sqrt(h) |
| Accelerometer Full Temperature Bias Drift (-40 °C to 85 °C) | HI14-S2/S3: XY=2-5 mg, Z=6-15 mg HI14-S5: XY=2-5 mg, Z=5-10 mg |
| Magnetometer Measurement Range | ±2000 uT |
| Magnetometer Noise | 0.19-0.45 uT |
| Magnetometer Nonlinearity | ±10 to ±20 uT |
| Temperature Sensor Range | -40 °C to 85 °C |
| Temperature Sensor Offset Error | ±5 °C |
| Static Pitch & Roll Accuracy | 0.15-0.20 ° |
| Dynamic Pitch & Roll Accuracy | 0.20-0.30 ° |
| AHRS Heading Accuracy | 2-3 ° |
| Static Heading Drift (6DoF, 2 h Static) | 0.15-0.20 ° |
| Dynamic Heading Drift | ±5 ° (HI14-SX) |
| Heading Rotation Error (@100 °/s, 6DoF) | HI14-S2/S3: 0.20-0.40 ° HI14-S5: 0.15-0.20 ° |
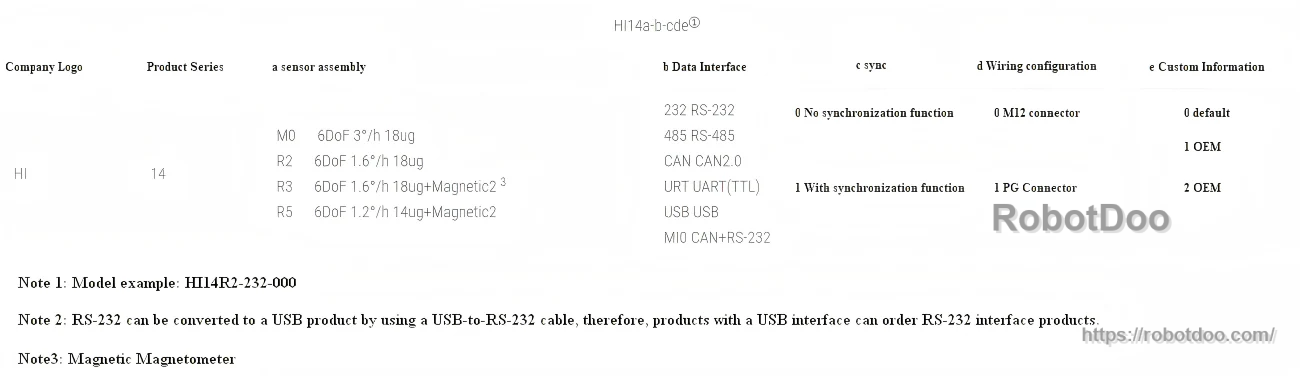
Model / Interface Coding (as labeled)
| Sensor assembly options | M0: 6DoF 3°/h 18ug R2: 6DoF 1.6°/h 18ug R3: 6DoF 1.6°/h 18ug + Magnetic³ R5: 6DoF 1.2°/h 14ug + Magnetic² |
| Data interface options | 232: RS-232 485: RS-485 CAN: CAN2.0 URT: UART (TTL) USB: USB MIO: CAN + RS-232 |
| Sync | 0: No synchronization function 1: With synchronization function |
| Wiring configuration | 0: M12 connector 1: PG Connector |
| Custom information | 0: default 1: OEM 2: OEM |
| Model example | HI14R2-232-000 |
| Note | RS-232 can be converted to a USB product by using a USB-to-RS-232 cable; therefore, products with a USB interface can order RS-232 interface products. Magnetic: Magnetometer |
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
- Service robots
- Low-speed autonomous robots
- Smart agricultural machinery
Manuals / Documents
- HIPNUC-HI14-S-Drawing.pdf
- HIPNUC-HI14-S-DataSheet.pdf
- HIPNUC-HI14-S(Direct_Cable).stp
- HIPNUC-HI14-S(M12_Angled).stp
- HIPNUC-HI14-S(M12_Straight).stp
Details
Built for IMU/VRU/AHRS builds, the HiPNUC HI14S inertial sensor targets low-noise motion sensing with rugged IP67 protection.

IP67 waterproof and dustproof sealing helps the sensor stay reliable in outdoor, humid, and dusty industrial environments.

Up to 1000 Hz output supports low-latency motion capture, while an adaptive EKF fusion algorithm helps stabilize attitude estimates.

Select the interface and wiring option that matches your integration needs, including USB, UART/RS-232, RS-485, and CAN variants.