Product Overview
IMU560 GPS/INS Integrated Navigation System
The IMU560 GPS/INS Integrated Navigation System is a high-precision inertial navigation device designed for vehicle navigation, marine systems, UAV control, surveying and industrial motion measurement.
The system integrates a 9-axis IMU, GNSS positioning module and advanced Kalman filtering algorithms to provide real-time navigation information including roll angle, pitch angle, heading angle, velocity and position data.
Through multi-sensor fusion technology, the IMU560 can maintain stable navigation performance even when GPS signals are temporarily lost, ensuring reliable motion measurement and positioning.
With its compact structure, high stability and industrial-grade design, the IMU560 is widely used in modern autonomous navigation and dynamic measurement systems.
Key Features
• High precision GPS/INS integrated navigation system
• Built-in 9-axis inertial measurement unit (IMU)
• Outputs roll, pitch and heading angles in real time
• Advanced Kalman filtering multi-sensor fusion algorithm
• Stable navigation performance even during GPS signal interruption
• Supports RS422 communication interface
• Wide input voltage 9–36V DC
• Compact and rugged industrial aluminum housing
• Full temperature calibration for stable performance
Product Advantages
Integrated Navigation Technology
The IMU560 combines GNSS positioning with inertial navigation sensors, delivering accurate motion and navigation information for dynamic environments.
High Precision Attitude Measurement
The system provides precise roll, pitch and heading angle measurement, ensuring reliable orientation data for vehicles, robots and unmanned systems.
Reliable Performance in Harsh Environments
Full temperature calibration and industrial design ensure stable performance in extreme temperatures, vibration and shock environments.
Continuous Navigation Output
Even when GPS signals are temporarily lost, the inertial navigation system can continue providing short-term navigation information.
Technical Specifications
Attitude Measurement
| Parameter | Specification |
|---|---|
| Roll / Pitch Accuracy (Dynamic 1σ) | 0.3° |
| Heading Accuracy (1σ) | 0.3° (GPS available) / 0.5° (GPS lost within 5 minutes) |
| Pure Inertial Positioning Accuracy | <40 m (1 minute after GPS loss) |
| Output Rate | 1 – 100 Hz |
Gyroscope
| Parameter | Specification |
|---|---|
| Measurement Range | ±300°/s |
| Bias Instability (Allan Variance) | 10°/h |
| Bias Stability (10s Average) | 15°/h |
| Bias Repeatability | 15°/h |
| Nonlinearity | <0.1% FS |
| Scale Factor Nonlinearity | <0.02% |
| Scale Factor Variation (25°C) | ±0.3% |
| Resolution | <0.01°/s |
| Angle Random Walk | <0.15°/√hr |
| Noise Density | 0.014°/s/√Hz |
| Bandwidth | 100 Hz |
Accelerometer
| Parameter | Specification |
|---|---|
| Measurement Range | ±4 g |
| Bias Stability | 0.2 mg |
| Full Temperature Bias | 1.7 mg |
| Scale Factor Stability | <0.1% |
| Resolution | 0.1 mg |
| Noise Density | 200 µg/√Hz |
| Bandwidth | 100 Hz |
Magnetometer
| Parameter | Specification |
|---|---|
| Measurement Range | ±2 Gauss |
| Heading Accuracy | ±1° |
Barometer
| Parameter | Specification |
|---|---|
| Pressure Range | 1000 – 120000 Pa |
| Pressure Accuracy | ±250 Pa |
GNSS Parameters
| Parameter | Specification |
|---|---|
| Cold Start | 29 s |
| Hot Start | 1 s |
| Sensitivity | −166 dBm |
| Velocity Accuracy | 0.05 m/s |
| Heading Accuracy | 0.3° (50% probability @ 30 m/s) |
| Horizontal Position Accuracy | 2 m |
| Supported Satellite Systems | GPS L1C/A, SBAS L1C/A, GLONASS L1OF, BEIDOU B1 |
Electrical Specifications
| Parameter | Specification |
|---|---|
| Input Voltage | 9 – 36V DC |
| Input Current | <100 mA |
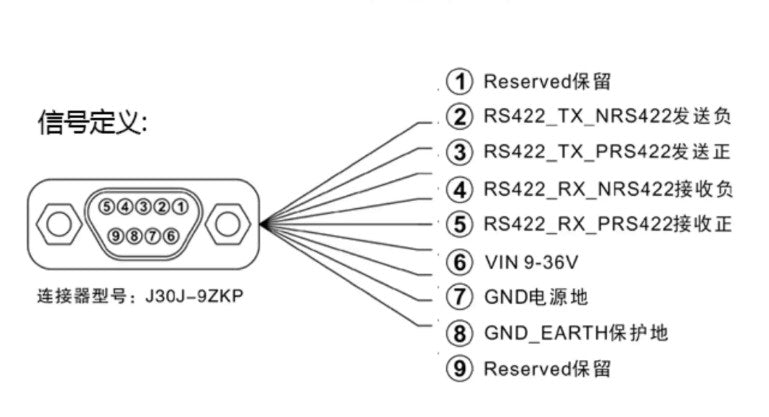
| Connector Type | J30J-9ZKP |
Environmental Specifications
| Parameter | Specification |
|---|---|
| Operating Temperature | −40°C to +85°C |
| Vibration Resistance | 10 grms (10 – 1000 Hz) |
| Shock Resistance | 100 g @ 11 ms |
Physical Parameters
| Parameter | Specification |
|---|---|
| Dimensions | 47 × 48 × 31.1 mm |
| Weight | 85 g (without cable) |
| Housing | Industrial aluminum alloy enclosure |
Communication Interface
| Parameter | Specification |
|---|---|
| Supported Interface | RS422 |
| Output Data | Attitude angle, Velocity, Position, Angular velocity, Acceleration |

Installation Notes
To ensure optimal measurement accuracy:
Mount the IMU securely using M4 screws to prevent vibration.
Install the sensor close to the vehicle’s center of gravity whenever possible.
Avoid locations with strong vibration, high temperature fluctuations or engine interference.
Align the IMU coordinate axis with the vehicle coordinate system.
Proper installation ensures accurate measurement of roll, pitch and heading angles.
Typical Applications
Marine Navigation Systems
Vehicle Navigation and Positioning
Unmanned Aerial Vehicle (UAV) Navigation
Autonomous Driving Systems
Underwater Robotics and Marine Survey
High-Speed Train Monitoring Systems
Satellite Communication Stabilization
Industrial Motion Measurement Systems
Package Includes
1 × IMU560 GPS/INS Integrated Navigation System