Overview
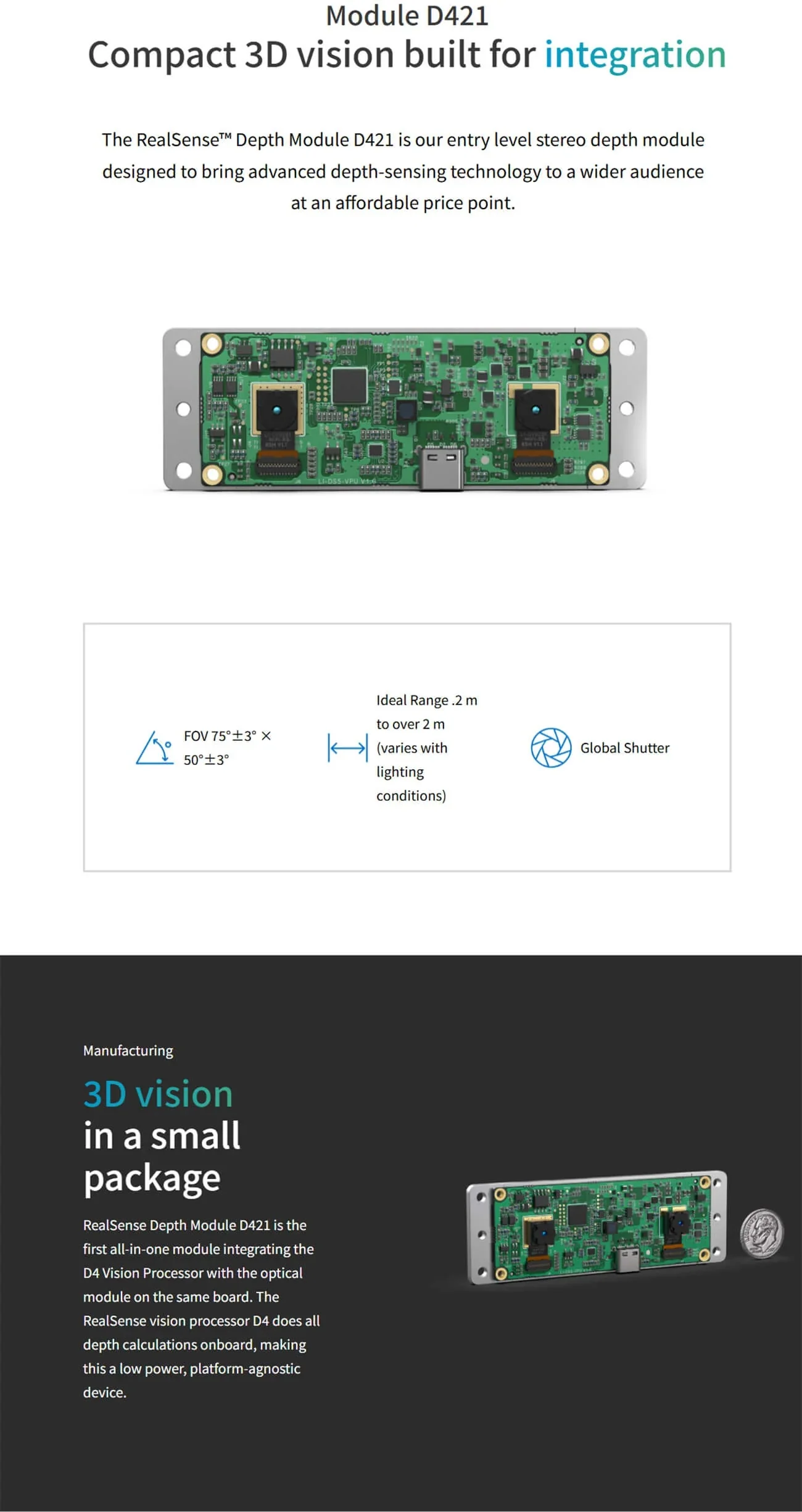
Intel RealSense Depth Module D421 is a compact stereo depth depth module designed for integration, combining the optical module and the D4 vision processor on a single board. The D4 vision processor performs depth calculations onboard, supporting low-power, platform-agnostic deployment and compatibility with RealSense SDK 2.0 on operating systems including Windows, Linux, and Android.
Key Features
- Compact 3D vision module built for integration
- Stereoscopic depth technology with global shutter image sensor technology
- Integrated single-board design (optical module + D4 vision processor)
- Depth calculations performed onboard by the RealSense vision processor D4
- Supported by RealSense SDK 2.0
- Compatible with platforms/operating systems including Windows, Linux, and Android
- Equipped with 1MP global shutter depth sensors
- IR band pass filter
Specifications
| Use environment | Indoor/Outdoor |
| Image sensor technology | Global Shutter |
| Depth Technology | Stereoscopic |
| Ideal Range | 0.2 m to over 2 m (varies with lighting conditions) |
| Minimum Depth Distance (Min-Z) | ~20 cm |
| Depth Accuracy | <4% at 2 m |
| Depth Field of View (FOV) | 75° ± 3° × 50° ± 3° |
| Depth Output Resolution | Up to 1280 × 720 |
| Depth Frame Rate | Up to 60 fps |
| Depth Filter | IR Band Pass Filter |
| Form Factor | Camera Module |
| Length x Depth x Height | 95 mm × 32 mm × 10.18 mm |
| Connectors | USB-C |
| Temperature Range | 0°C to 35°C |
Applications
- Humanoid Robots
- Robotic Arms
- Exoskeletons
- Quadruped Robots
- AGV Vehicles
- ARU Robots
- Moving robots for navigation, obstacle avoidance, and object recognition
- Vision-based AI applications
Manuals
Details
Designed for embedded builds, the D421 combines the optical module and D4 vision processor on one compact board for onboard depth processing.
RealSense SDK 2.0 support helps streamline integration across common platforms, including Windows, Linux, and Android.
A solid fit for moving robots and AGVs that need reliable depth data for navigation, obstacle avoidance, and object recognition.