


Overview
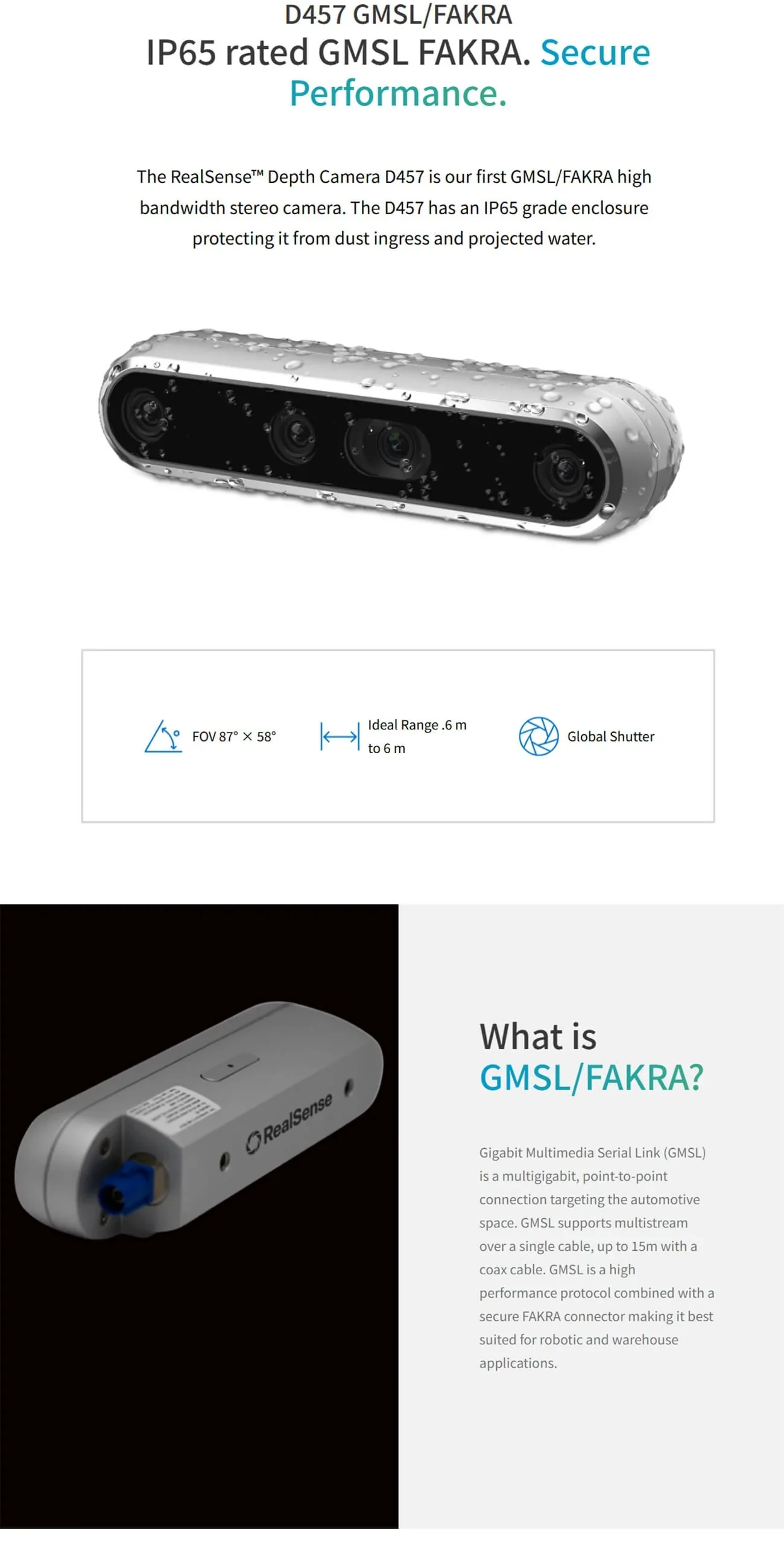
The Intel RealSense Depth Camera D457 is a stereoscopic depth camera with a GMSL/FAKRA interface and an IP65-grade enclosure designed to help protect against dust ingress and projected water. It combines global-shutter depth sensing with an RGB global-shutter sensor and an integrated IMU for applications where the camera moves.
Key Features
- GMSL/FAKRA interface: Adds a GMSL serializer and FAKRA connector to the RealSense camera product line.
- Why GMSL/FAKRA: Lower power consumption, reduced ESD/EMI noise, lower latency, and longer cable length compared to USB, while providing higher bandwidth compared to Ethernet.
- IMU inside: Integrated IMU helps refine depth awareness in situations where the camera moves.
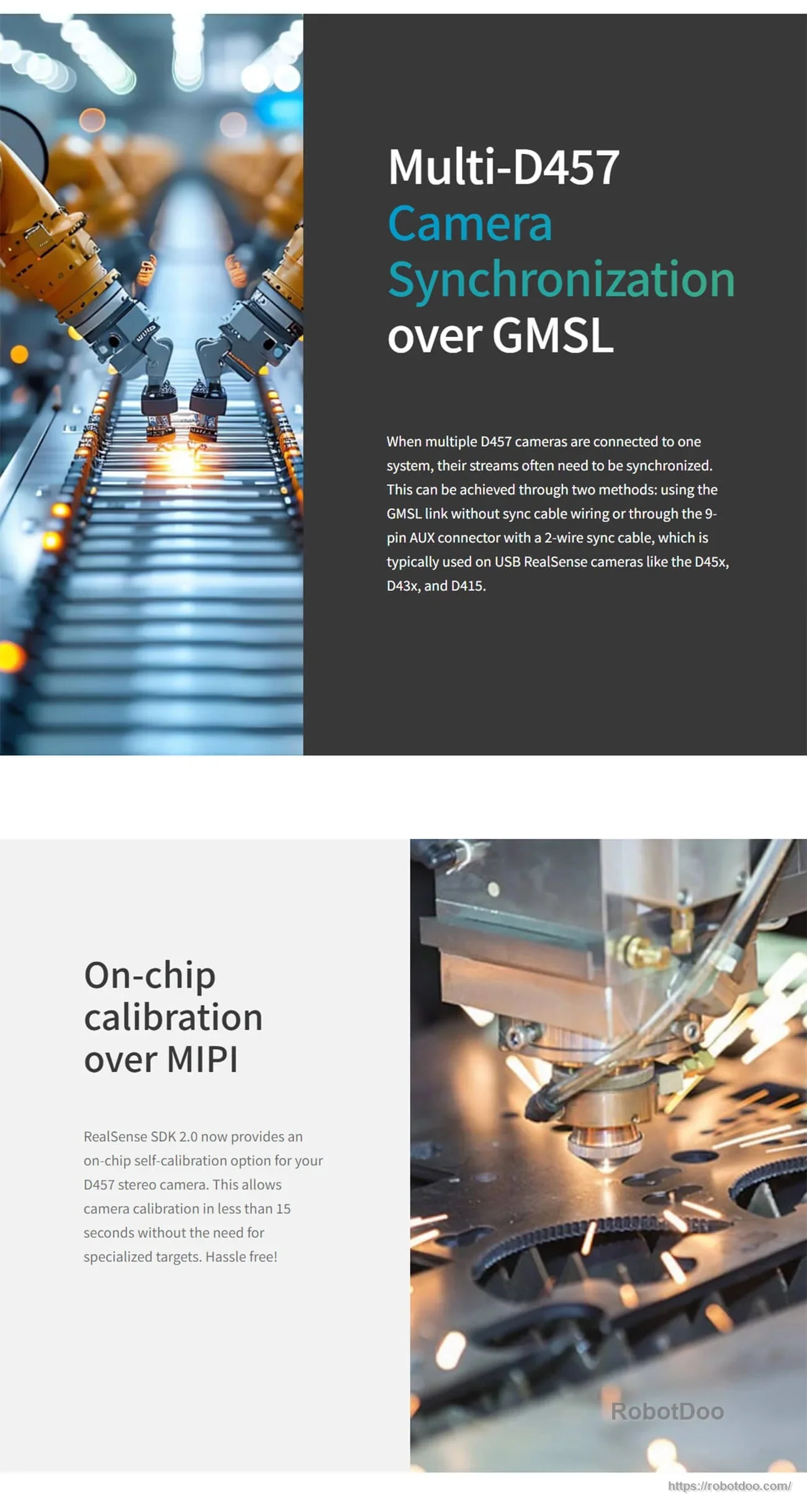
- Multi-camera synchronization over GMSL: When multiple D457 cameras are connected to one system, streams can be synchronized using the GMSL link (without sync cable wiring) or through the 9-pin AUX connector with a 2-wire sync cable (typically used on USB RealSense cameras like the D45x, D43x, and D415).
- On-chip calibration over MIPI: RealSense SDK 2.0 provides an on-chip self-calibration option for the D457 stereo camera, enabling calibration in less than 15 seconds without specialized targets.
Specifications
| Use environment | Indoor/Outdoor |
| Depth technology | Stereoscopic |
| Image sensor technology | Global Shutter |
| Ideal range | 0.6 m to 6 m |
| Minimum depth distance (Min-Z) at max resolution | ~52 cm |
| Depth accuracy | <2% at 4 m |
| Depth field of view (FOV) | 87° × 58° |
| Depth output resolution | Up to 1280 × 720 |
| Depth frame rate | Up to 90 fps |
| RGB sensor technology | Global Shutter |
| RGB sensor resolution | 1 MP |
| RGB sensor FOV (H × V) | 90° × 65° |
| RGB frame resolution | Up to 1280 × 800 |
| RGB frame rate | 30 fps |
| RGB resolution and frame rate | 1280 × 800 at 30 fps |
| Inertial measurement unit | Yes |
| Camera module | RealSense Module D450 |
| Vision processor board | RealSense Vision Processor D4 Board V5 |
| Form factor | Camera Peripheral |
| Dimensions (L × D × H) | 124 mm × 26 mm × 36 mm |
| Connectors | GMSL/FAKRA |
| Mounting mechanism | One 1/4-20 UNC thread mounting point; Two M4 thread mounting points; Tripod |
Applications
- Autonomous mobile robots (AMR)
- Humanoid robots
- Quadruped robots
- Robotic arms
- AGV vehicles
- Exoskeletons
- ARU robots
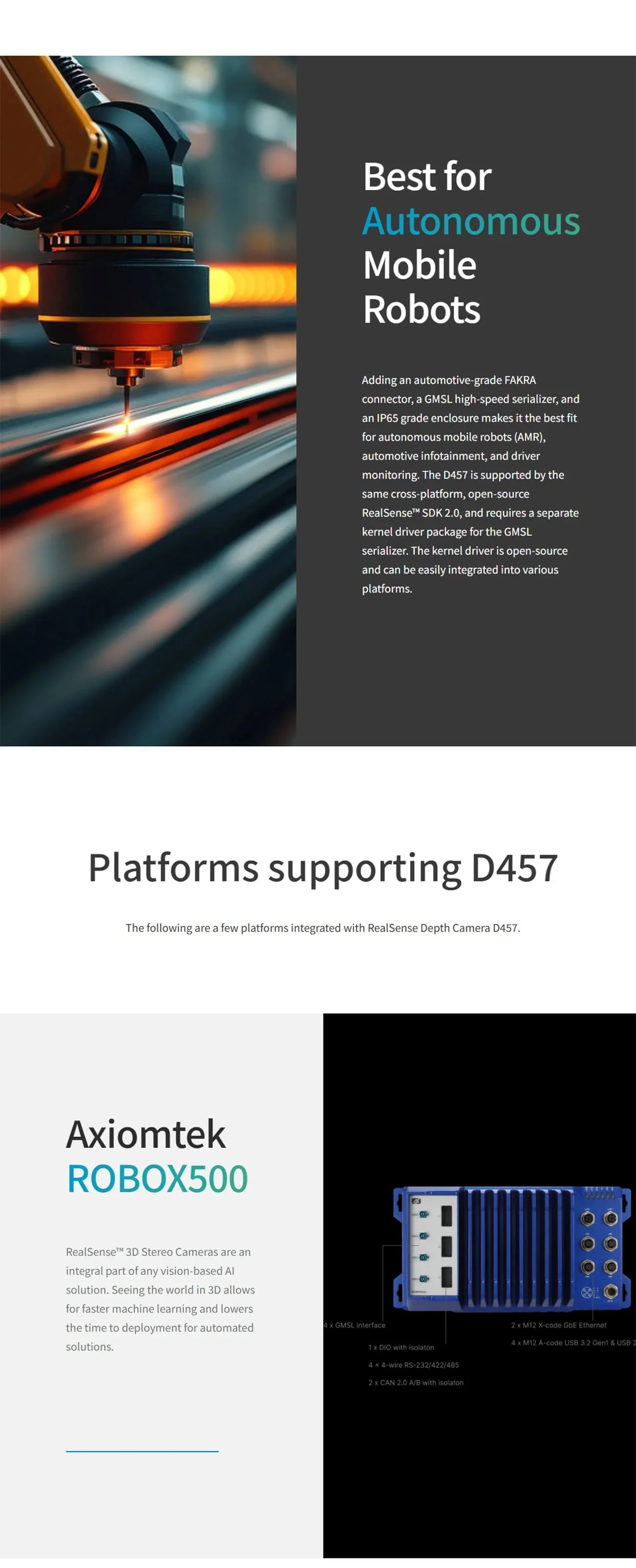
The D457 is supported by the same cross-platform, open-source RealSense SDK 2.0 and requires a separate kernel driver package for the GMSL serializer (kernel driver is open-source and can be integrated into various platforms). For integration and selection guidance, contact customer service.
Manuals
Details
Built for mobile robotics, the RealSense D457 combines IP65 protection with a GMSL/FAKRA link for reliable stereo depth and RGB capture in harsh environments.
GMSL/FAKRA provides a robust, low‑latency connection over longer cable runs, while the integrated IMU helps maintain depth awareness when the camera is moving.

Synchronize multiple D457 units over the GMSL link and use RealSense SDK on‑chip self‑calibration over MIPI for fast setup without specialized targets.


