Overview
The Joycon-Robotics Controller (LeRobot) is a robotics controller developed and open-sourced by box2ai-robotics for simulation-to-real robotic arm control. It is designed for seamless workflow between simulation environments and physical robotic arms, with support for dual-mode operation (keyboard/Joycon) validation.
Key Features
- Seamless dual-platform integration with the lerobot-kinematics open-source project for transition between simulation and physical robotic arms
- Direct control of SO-ARM100 and other physical arms via
lerobot_joycon_gpos_real.py - Supports MuJoCo visualization environment for dual-mode (keyboard/Joycon) operational validation
- Integrated forward/inverse kinematics algorithms enabling 6-DOF end-effector positioning
- XYZ-axis linear displacement control (±0.5mm accuracy)
- Roll/Pitch orientation adjustment (±1° accuracy)
- D-pad axial fine-tuning for precision assembly requirements
- Ergonomic grip design (original Nintendo Joy-Con controllers)
- Haptic feedback system for connection success/error alerts and operation confirmation
- One-touch homing function (Home button/Capture button)
- Smart gripper state memory (ZL/ZR trigger control)
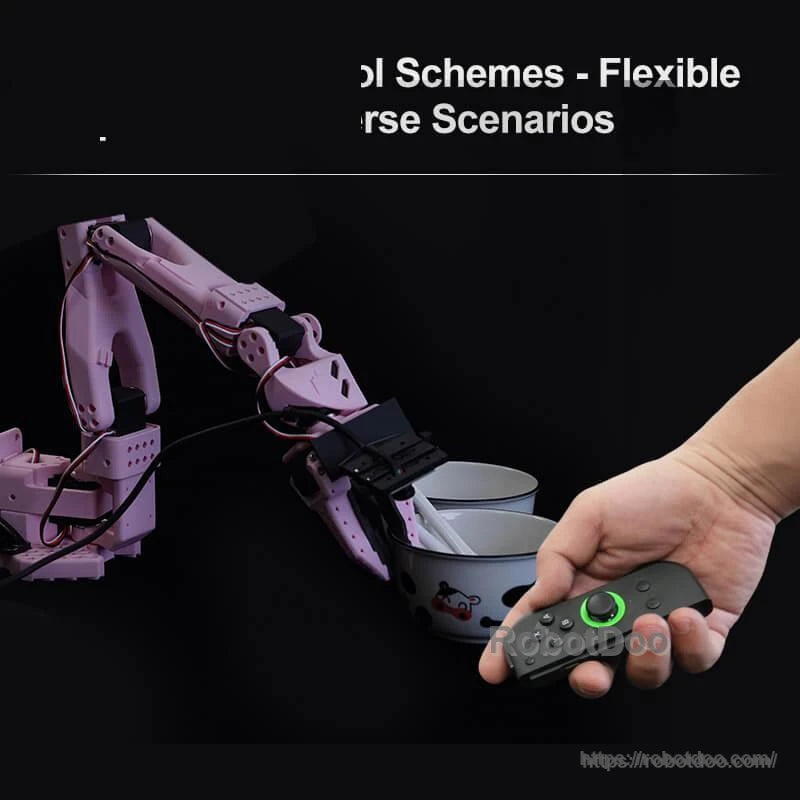
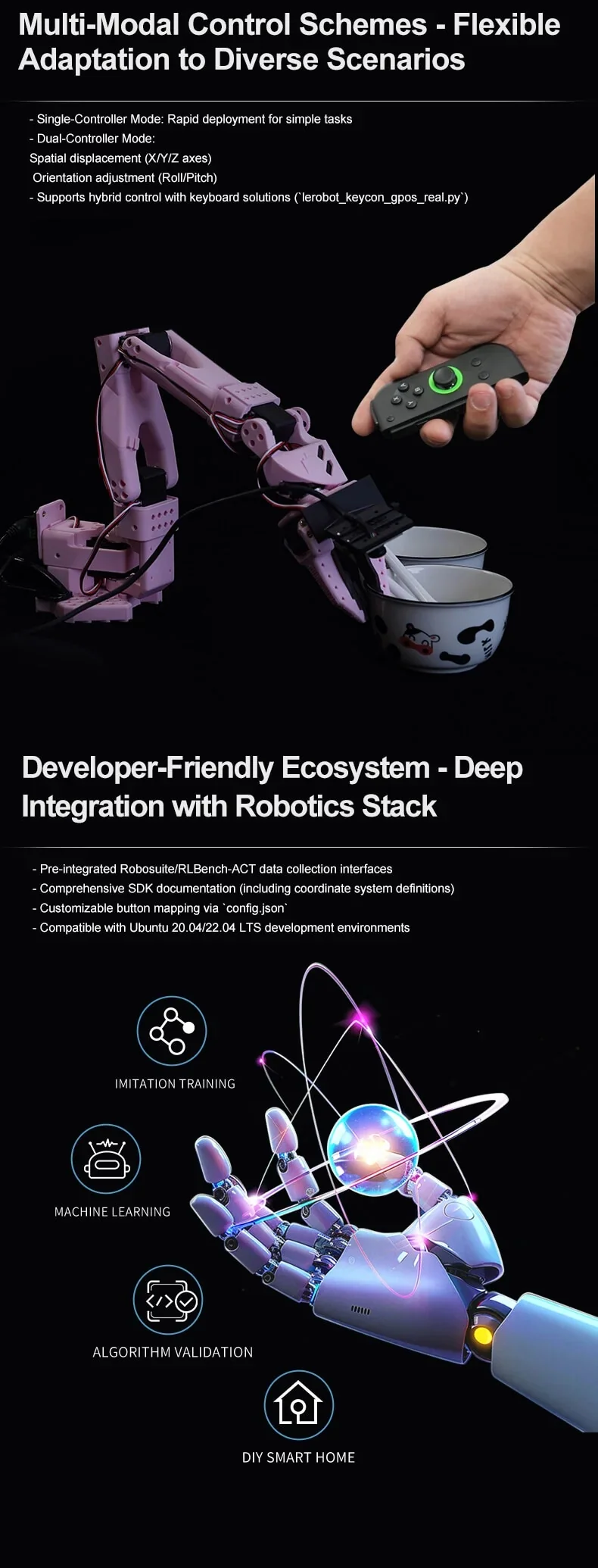
- Multi-modal control schemes: single-controller mode and dual-controller mode
- Dual-controller mode supports spatial displacement (X/Y/Z axes) and orientation adjustment (Roll/Pitch)
- Supports hybrid control with keyboard solutions via
lerobot_keycon_gpos_real.py - Pre-integrated Robosuite/RLBench-ACT data collection interfaces
- Comprehensive SDK documentation (including coordinate system definitions)
- Customizable button mapping via
config.json - Compatible with Ubuntu 20.04/22.04 LTS development environments
- Bluetooth 5.0 anti-interference connectivity (10m effective range)
- Built-in auto-reconnection mechanism (5-second recovery)
- 2000+ hours continuous stress testing certification
- Diagnostic tools provided
Specifications
| Wireless | Bluetooth 5.0 |
| Effective range | 10m |
| Auto-reconnection recovery | 5-second recovery |
| Motion control | 6-DOF end-effector positioning (integrated forward/inverse kinematics) |
| Linear displacement accuracy | ±0.5mm (XYZ axes) |
| Orientation adjustment accuracy | ±1° (Roll/Pitch) |
| Validation testing | 2000+ hours continuous stress testing certification |
| OS compatibility (development) | Ubuntu 20.04/22.04 LTS |
What’s Included
- Version options: Single (Only One) or Pair (Double)
- Pair (Double) packaging includes two controllers and a cable
Applications
- Simulation-to-real robotic arm control
- Robotic arm teleoperation and end-effector positioning (XYZ + Roll/Pitch)
- Data collection and algorithm validation workflows (Robosuite/RLBench-ACT)
- Development setups using MuJoCo visualization and Ubuntu LTS environments
Manuals / Documentation
For order assistance and after-sales support, please contact the store’s customer service team.
Details

Developed and open-sourced by box2ai-robotics, LeRobot enables seamless control workflows from simulation environments to real robotic arms.

Precise XYZ displacement and roll/pitch adjustments support stable teleoperation and fine alignment tasks.
Flexible single- or dual-controller schemes pair with a developer-focused ecosystem for robotics research and data collection.

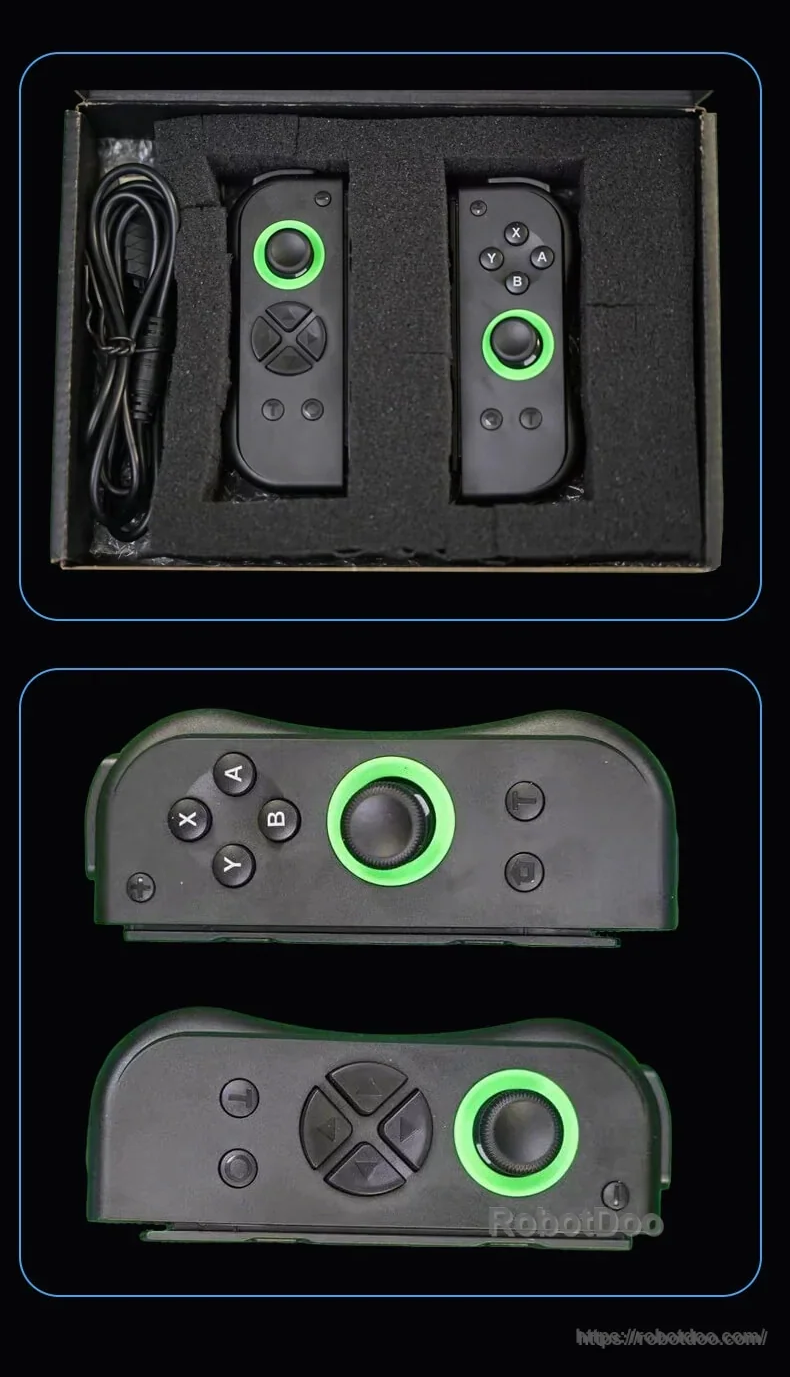
Pair packaging includes two controllers and a cable for dual-controller operation options.