Overview
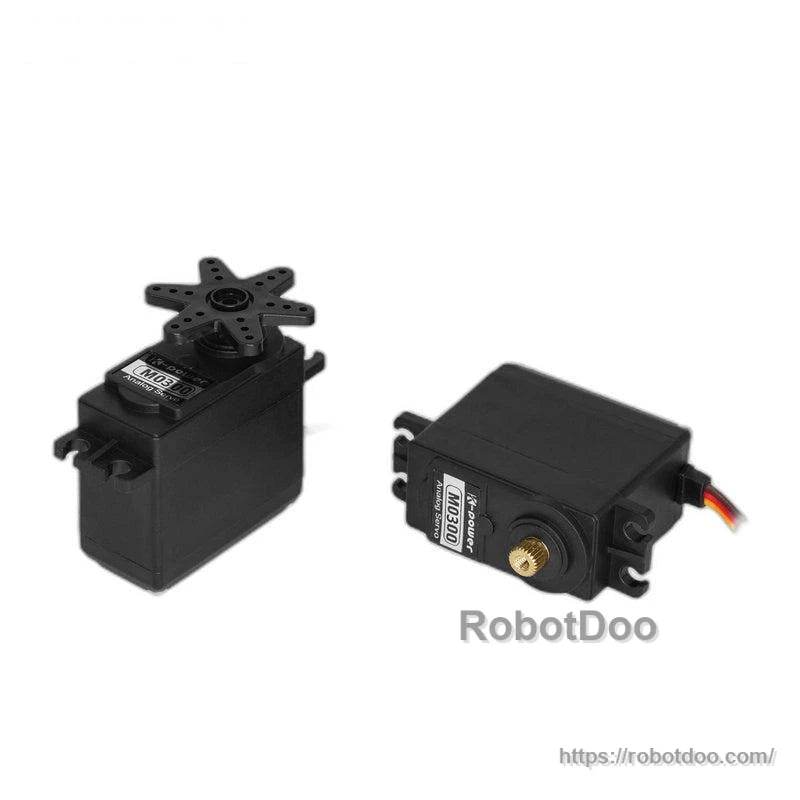
The Kpower M0300 servo motor is a compact actuator for robotics and motion-control projects, labeled as an analog servo. It uses a DC brushed motor with a potentiometer position sensor and metal gears, and supports multiple control protocols: PWM | TTL | RS-485.
Key Features
- Precision machined metal gear train
- High-speed response
- Potentiometer position feedback (long lifespan potentiometer)
- Dual ball bearings (2BB)
- Servo plug wire: JR, FUTABA
- Travel angle range: 120° (customizable); standard angle options shown: 120°, 180°, 270°, 360°
Technical Specifications
| Parameter | Value |
|---|---|
| Item Name | M0300 |
| Stall Torque | 4.5 kg (also shown as 4.5 kg.cm) |
| Rated Torque | 1 kg |
| No-load Speed | 0.12 s (also shown as 0.12 s/60°) |
| Weight | 58 g |
| Dimension | 40.7 × 19.8 × 37.7 mm |
| Travel Angle Range | 120° (Customizable) |
| Operating Voltage | 4.8 ~ 8.4 V |
| Horn Gear Spline | 25T φ5.7 mm |
| Gear Material | Metal |
| Motor | DC Brushed |
| Protocol | PWM | TTL | RS-485 |
| No-load Current | 2500 mA |
| Position Sensor | Potentiometer |
| Case Material | Plastic |
| Ball Bearing | 2BB |
| Working Frequency | 50 ~ 333 Hz |
| Operating Temperature | -10 ~ 50°C |
| IP Rating | IP42 |
Application Scenarios
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
- Robot joint
- R/C model
- Industrial equipment
- Education robot kit
Control Signal Notes
- Typical PWM reference shown: a pulse every 20 ms (20 ms per cycle).
- Example pulse widths shown: 0.5 ms, 1 ms, 1.5 ms, 2 ms, 2.5 ms.
- Example output shaft angles shown: -90°, -45°, -0°, 45°, 90°.
Manuals
Details

A compact M0300 analog servo built for robotics joints and motion-control builds, with metal gears and position feedback.

Mounting ears and a standard 3‑wire servo lead make it easy to integrate into brackets, arms, and robot frames.
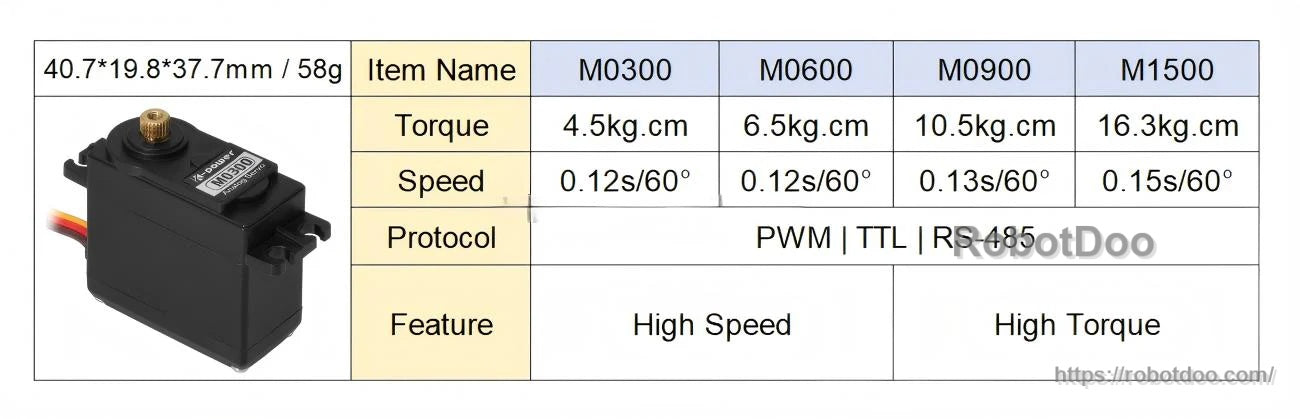
Key specs at a glance, including torque, speed, size/weight, and supported control protocols.

Designed around a precision metal gear train for quick response and reliable potentiometer-based position feedback.

Use these reference ranges to match rotation angle, speed, and operating voltage to your project requirements.

Multiple horn styles support different linkage geometries, from direct arms to round plates and multi-point mounts.
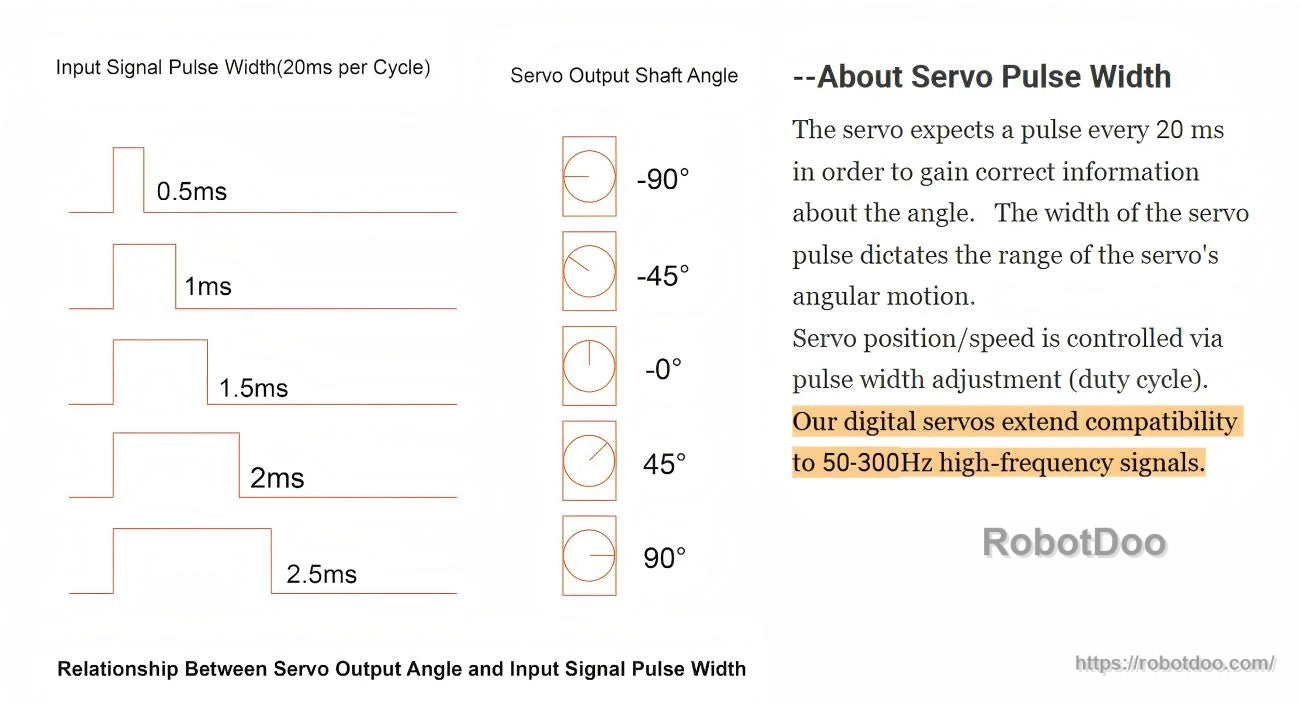
PWM control mapping helps you set consistent angles by adjusting pulse width within each 20 ms control cycle.

For OEM/ODM builds, configuration can be tailored across torque targets, protocols, wiring, and protection features.
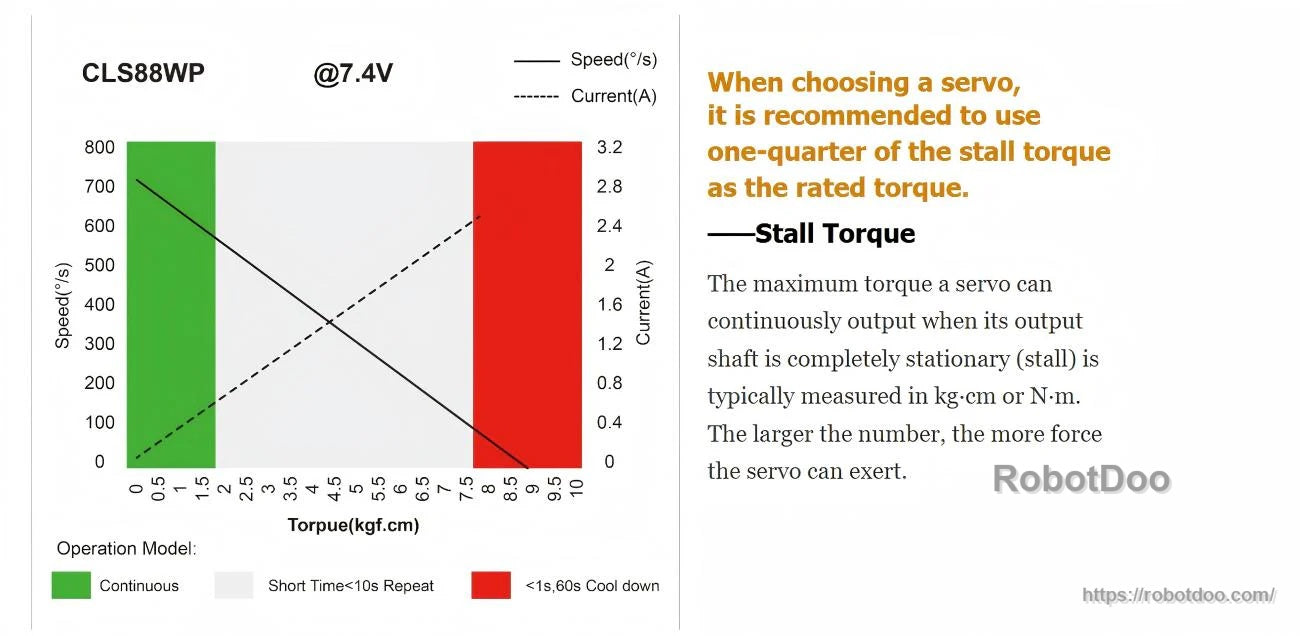
A quick sizing reminder: continuous torque is typically selected well below stall torque for stable operation.
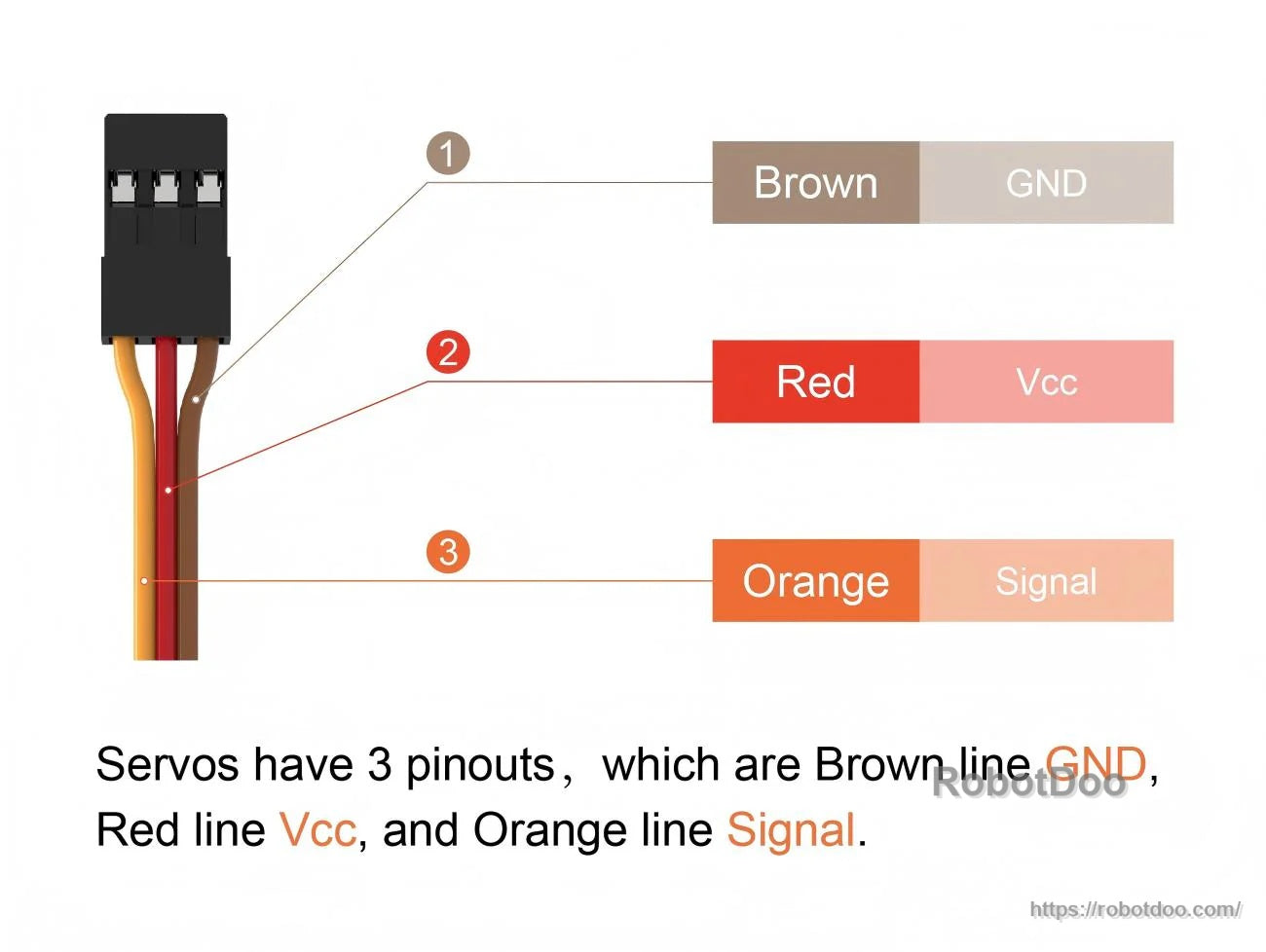
Standard servo pinout wiring: brown for ground, red for power, and orange for the control signal.

Internal layout overview covering the gear stages, bearings, DC motor, and potentiometer position sensor.
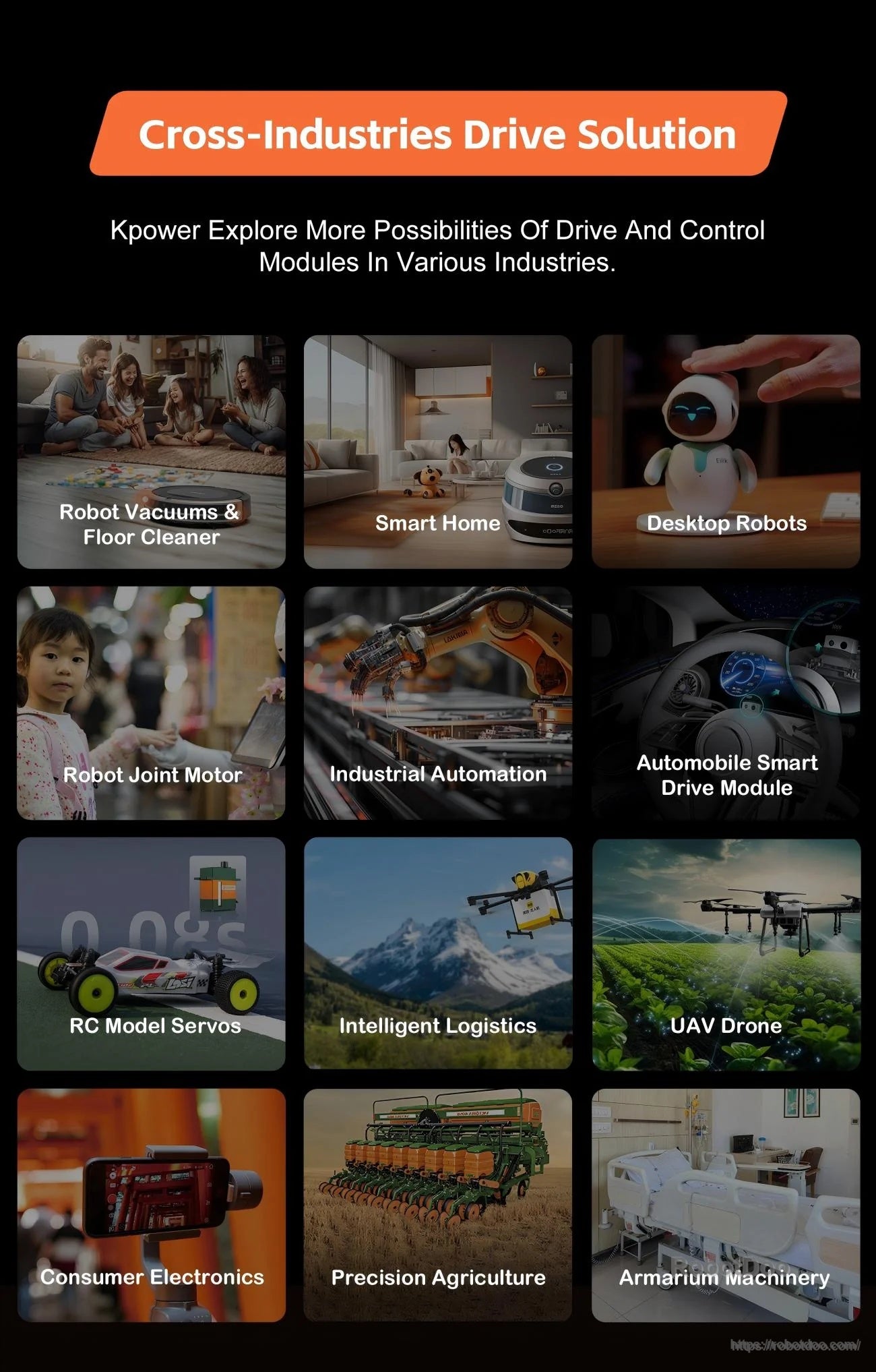
Fits a wide range of motion and actuation use cases, from educational robots to automation prototypes.
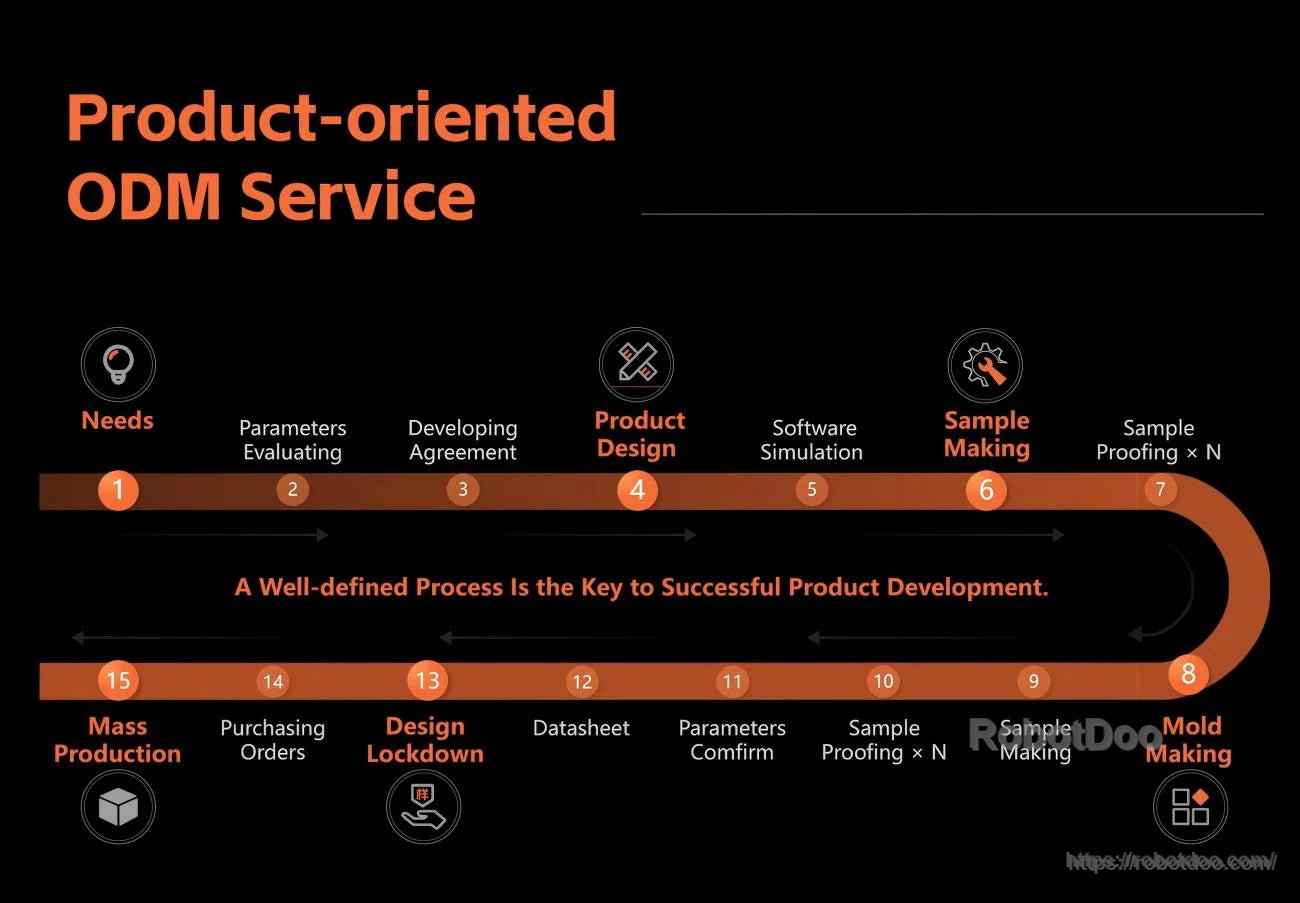
A structured development path is available when you need a servo solution taken from concept through production.