Overview
Kpower M0600 Servo Motor for robotics joints and RC model actuation. The servo uses a DC brushed motor with metal gears and a potentiometer position sensor, and supports control via PWM, TTL, or RS-485.
Key Features
- Precision machined metal gear
- High-speed response
- Long lifespan potentiometer
- Protocols: PWM | TTL | RS-485
Specifications
| Item Name | M0600 |
| Stall Torque | 6.5 kg (as provided) |
| Torque (listed) | 5.8 kg.cm @ 4.8 V; 6.5 kg.cm @ 6.0 V |
| Rated Torque | 1.5 kg (as provided) |
| No-load Speed | 0.12 s (as provided); 0.13 sec/60° @ 4.8 V; 0.12 sec/60° @ 6.0 V |
| Speed (series table) | 0.12 s/60° |
| Weight | 58 g |
| Dimensions | 40.7 × 19.8 × 37.7 mm (1.61" × 0.78" × 1.48") |
| Travel Angle Range | 120° (Customizable) |
| Operating Voltage | 4.8 ~ 8.4 V |
| Horn Gear Spline | 25T φ5.7 mm |
| Gear Material | Metal |
| Motor | DC Brushed |
| Protocol | PWM | TTL | RS-485 |
| No-load Current | 3000 mA |
| Position Sensor | Potentiometer |
| Case Material | Plastic |
| Ball Bearing | 2BB |
| Working Frequency | 50 ~ 333 Hz |
| Operating Temperature | -10 ~ 50°C |
| IP Rating | IP42 |
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
- Robot joints
- R/C models
- Industrial equipment
- Education robot kits
- RC aircraft model; RC car model
- Bionic robot (Robot Parrot)
- Industrial endoscope
- STEAM robot kit
Wiring
- Brown: GND
- Red: Vcc
- Orange: Signal
Manuals
Details

Compact M0600 servo for robotic joints and R/C actuation, built in a lightweight plastic case with metal output spline.

Metal gears and potentiometer position feedback support fast, repeatable movement for robotics applications.

Key specifications at a glance—torque/speed ratings, compact dimensions, and DC brushed motor construction.
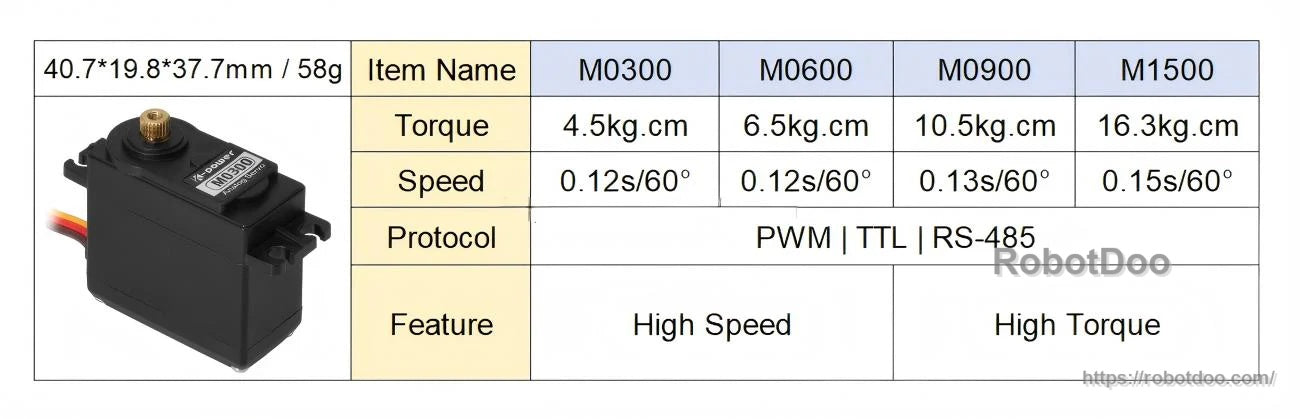
Compare M0600 against other M-series options by torque, speed, and supported control protocols.

Quick reference for selecting servo torque, travel angle, and voltage to match the load and motion profile.

Multiple horn styles help adapt the output shaft to linkages, arms, and custom brackets.
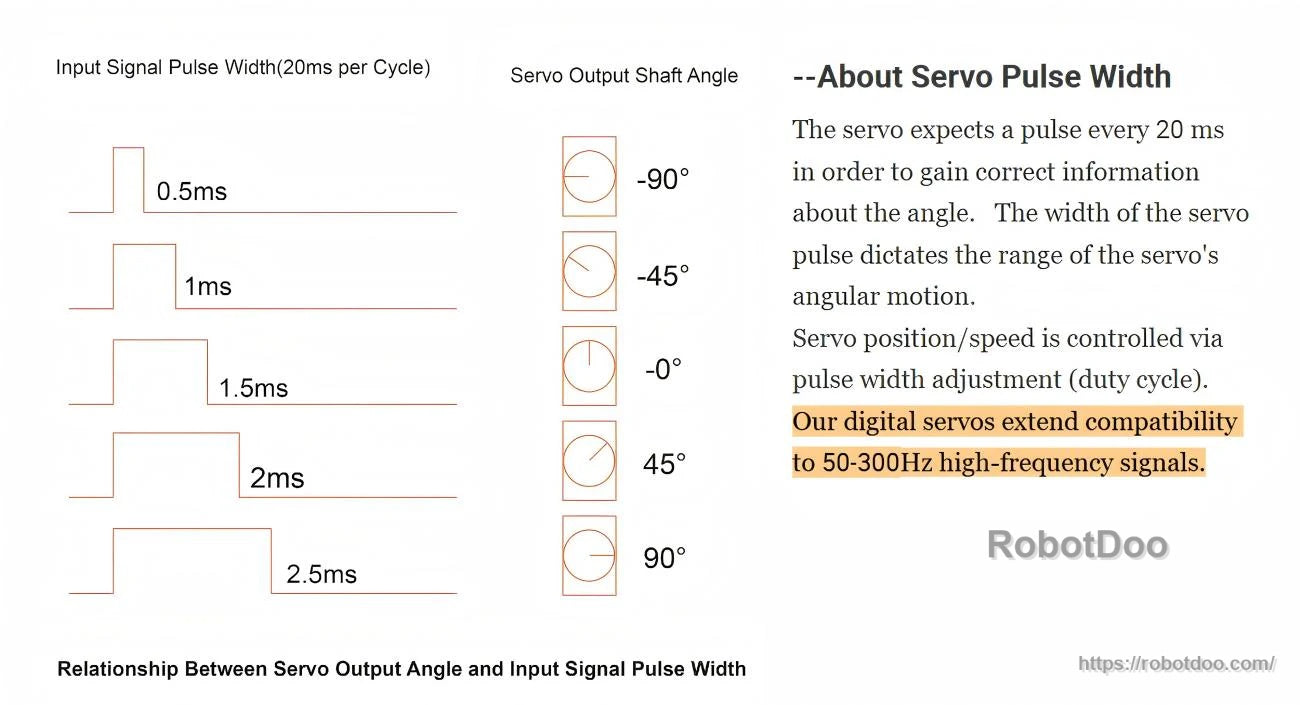
PWM pulse width directly sets target angle, with support for higher working frequencies for responsive control.

Customization options are available for appearance, wiring, protocols, and protection features when integrating into products.
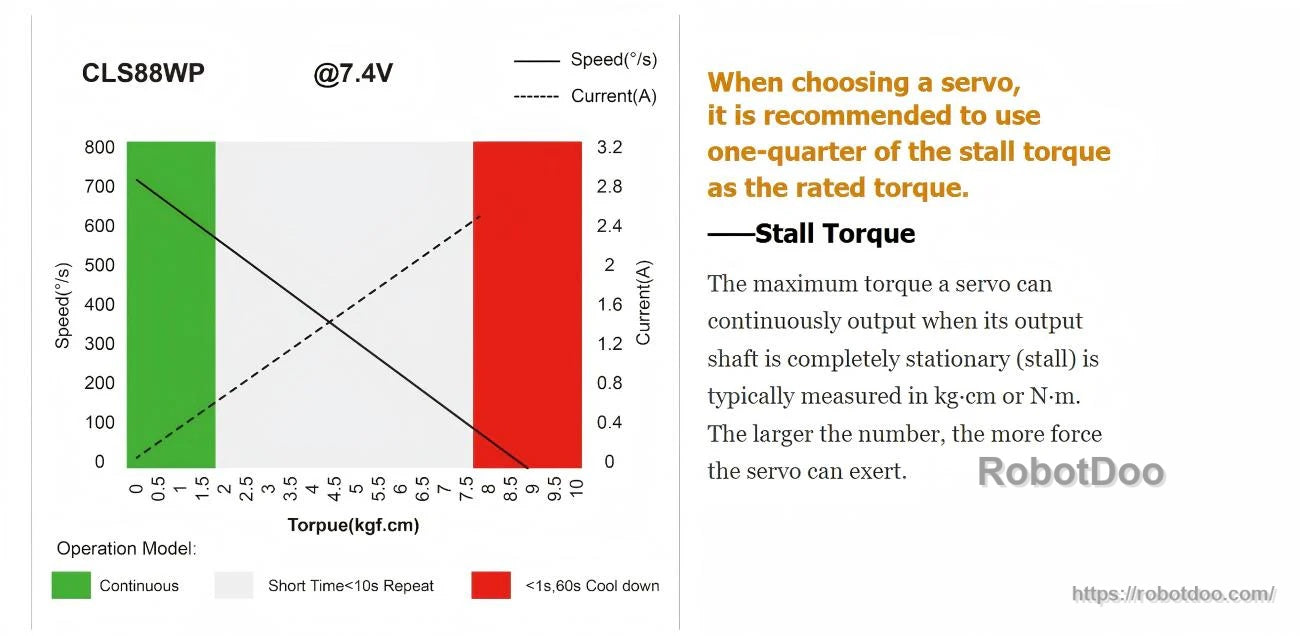
Use stall torque as a reference point, then size the servo conservatively for continuous-duty operation.
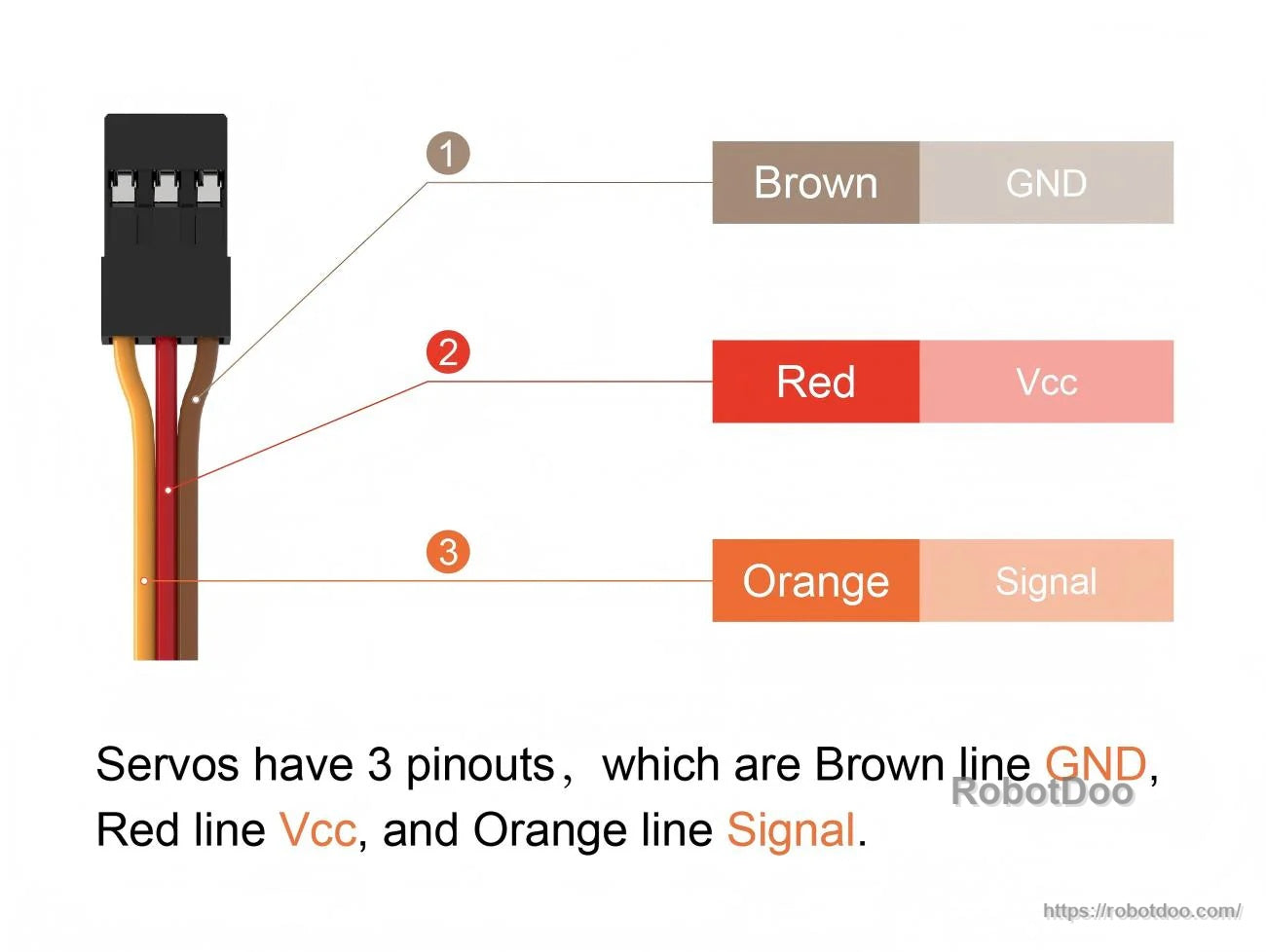
Standard 3-wire hookup: brown to GND, red to Vcc, and orange to the control signal line.
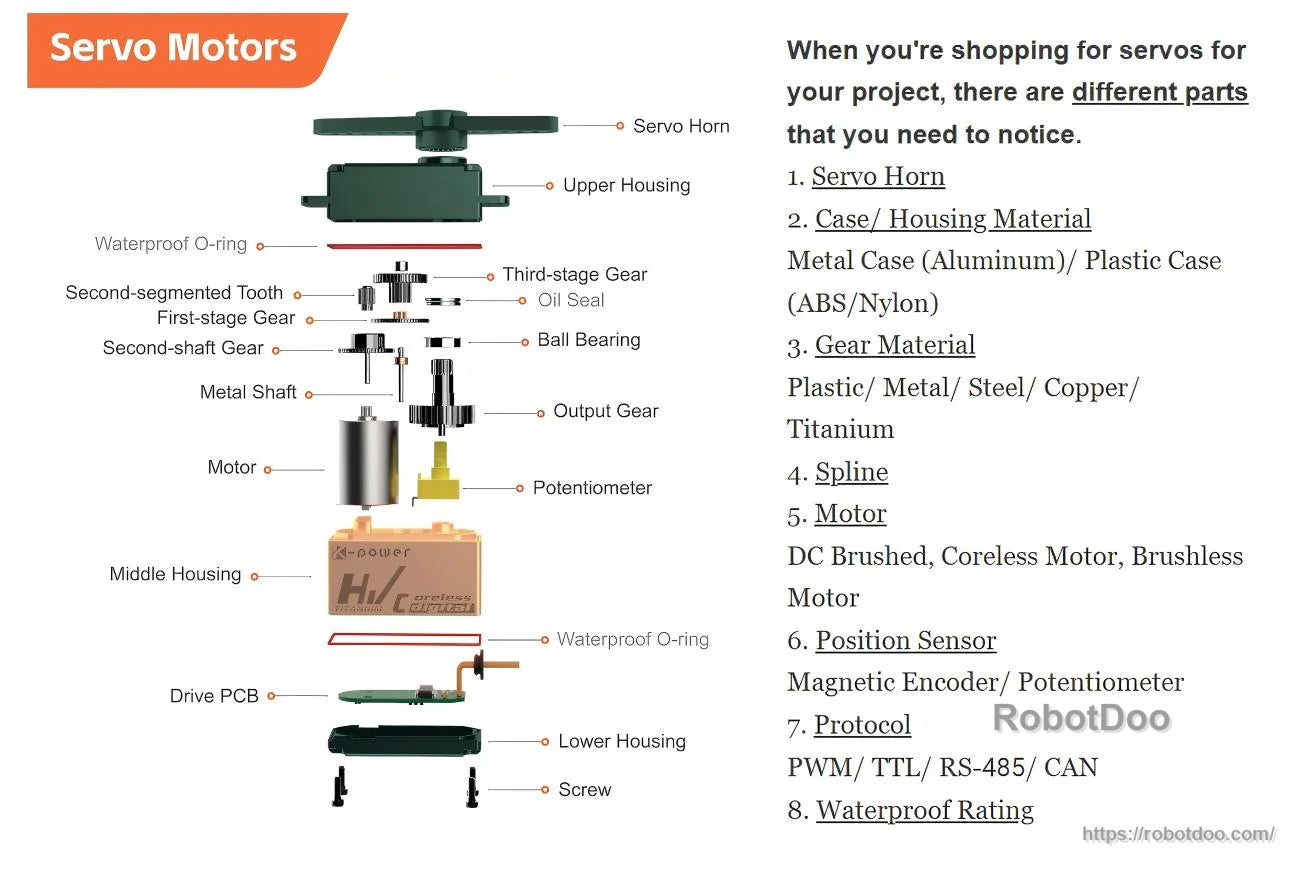
Internal layout overview covers the drive train, bearings, motor type, and position sensor used for control feedback.