Overview
Kpower MM3000 is a servo motor for robotics and RC motion control. It features metal gears, a potentiometer position sensor, and supports multiple control interfaces (PWM, TTL, RS-485) for integration with common controllers.
Key Features
- Precision machined metal gear train
- High-speed response
- Long lifespan potentiometer
- Protocols: PWM | TTL | RS-485
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
- 1/5 scale large remote control car
- RC models (throttle), 1/8 and 1/10 RC car, Baja, monster truck, rock crawler
- Robot joint, STEM education, maker intelligent model projects
Specifications
| Model | MM3000 |
| Stall Torque | 30 kg |
| Rated Torque | 7.5 kg |
| Torque (listed by voltage) | 28 kg.cm @ 4.8 V; 35 kg.cm @ 6.0 V |
| No-load Speed | 0.18 s |
| Speed (listed by voltage) | 0.20 sec/60° @ 4.8 V; 0.18 sec/60° @ 6.0 V |
| Operating Voltage | 4.8 ~ 8.4 V |
| Working Frequency | 50 ~ 333 Hz |
| Travel Angle Range | 120° (Customizable) |
| Protocol | PWM | TTL | RS-485 |
| Position Sensor | Potentiometer |
| Motor | DC Brushed |
| Gear Material | Metal |
| Horn Gear Spline | 25T φ8 mm |
| Ball Bearing | 2BB |
| No-load Current | 5000 mA |
| Case Material | Plastic + Aluminum Alloy |
| IP Rating | IP42 |
| Operating Temperature | -10 ~ 50°C |
| Dimensions | 60 × 30 × 60.5 mm |
| Size (alternate notation) | 60*30*60.5 mm |
| Weight | 188 g |
Manuals
Details

Built for robotics and RC motion control, the MM3000 combines a robust case with a metal output spline for secure mounting.

A precision-machined metal gear train and potentiometer position sensor support responsive control and consistent feedback over time.

Key specs are summarized for quick comparison during robot joint or RC drivetrain planning.
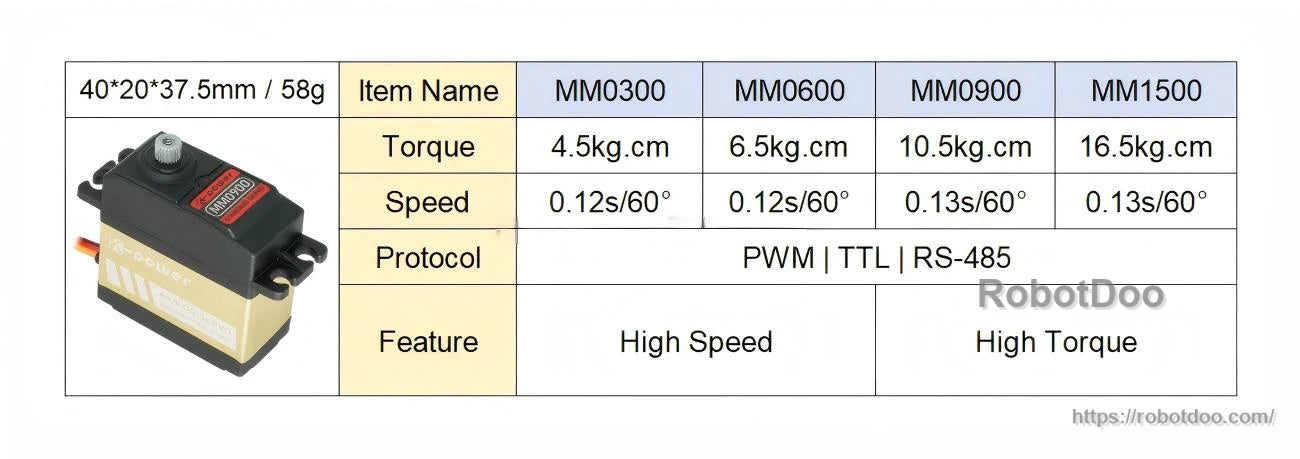
Choose the right M-series option by torque and speed, with control protocol support including PWM, TTL, and RS-485.

Selection guidelines help match torque, speed, and operating voltage to your specific mechanism and load.

Multiple horn styles make it easier to adapt the output to common linkages, arms, and brackets.
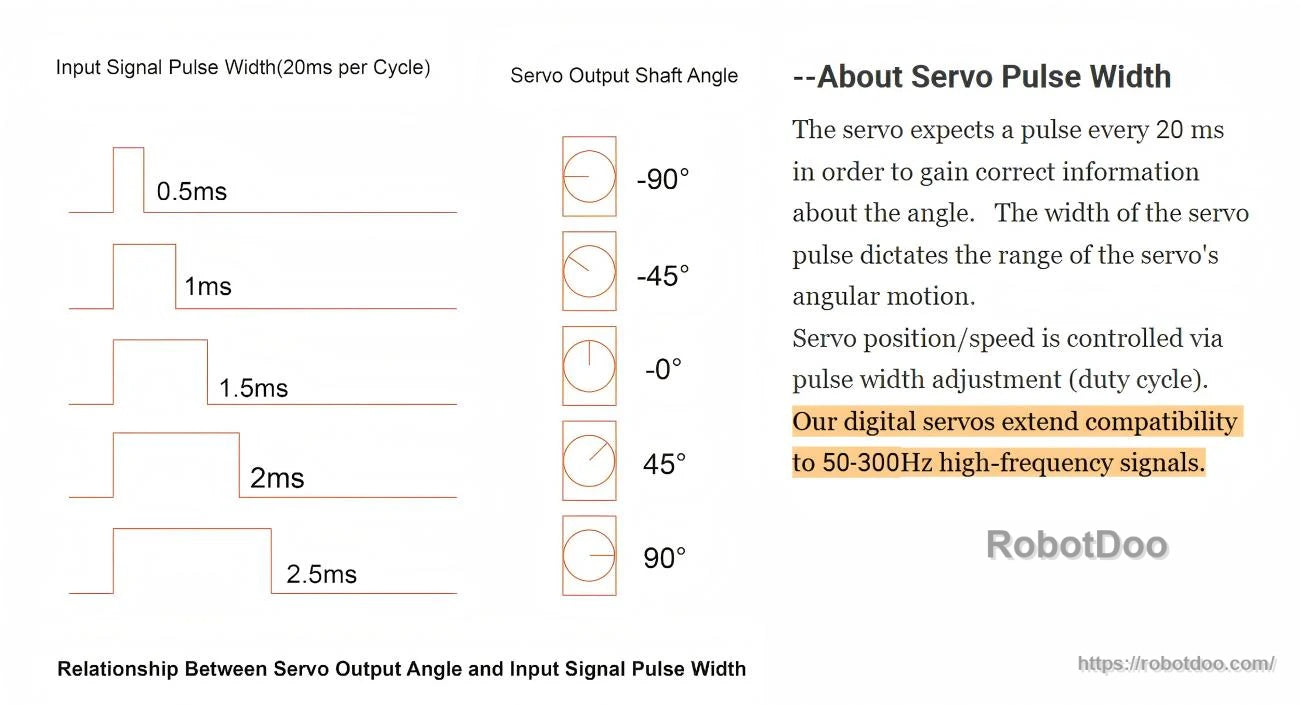
Standard PWM pulse widths control shaft angle, with support for higher-frequency signals depending on the controller setup.

Custom options are available for projects that need specific torque targets, communication interfaces, or wiring layouts.
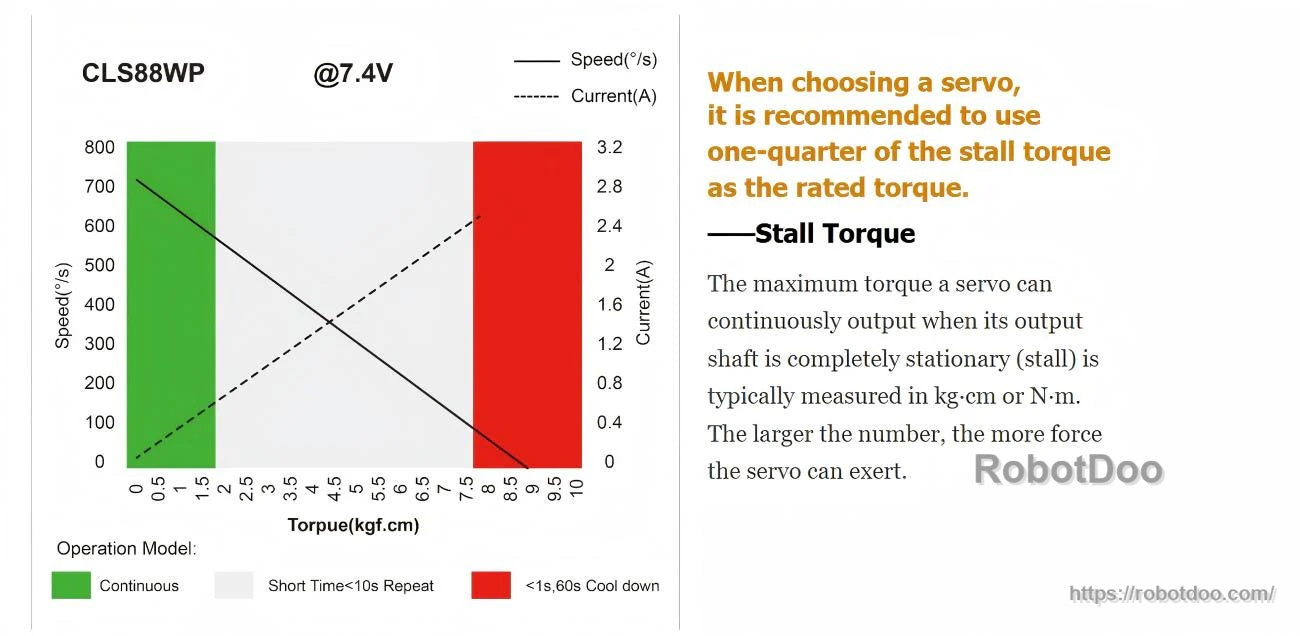
For reliable continuous operation, servo sizing is typically based on a conservative rated-torque target rather than stall torque.
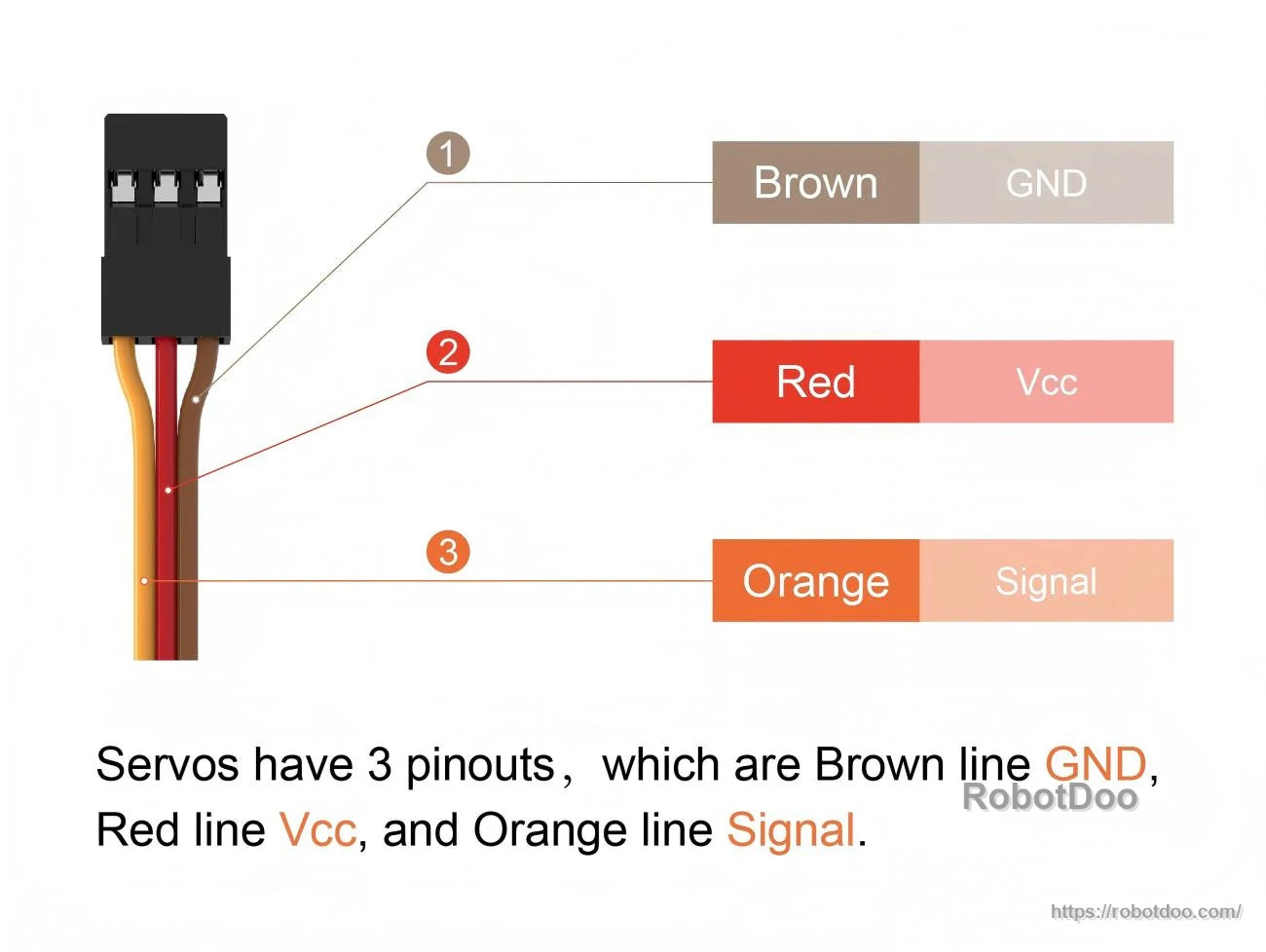
Wiring follows the standard 3-pin servo layout: ground (brown), power (red), and signal (orange).
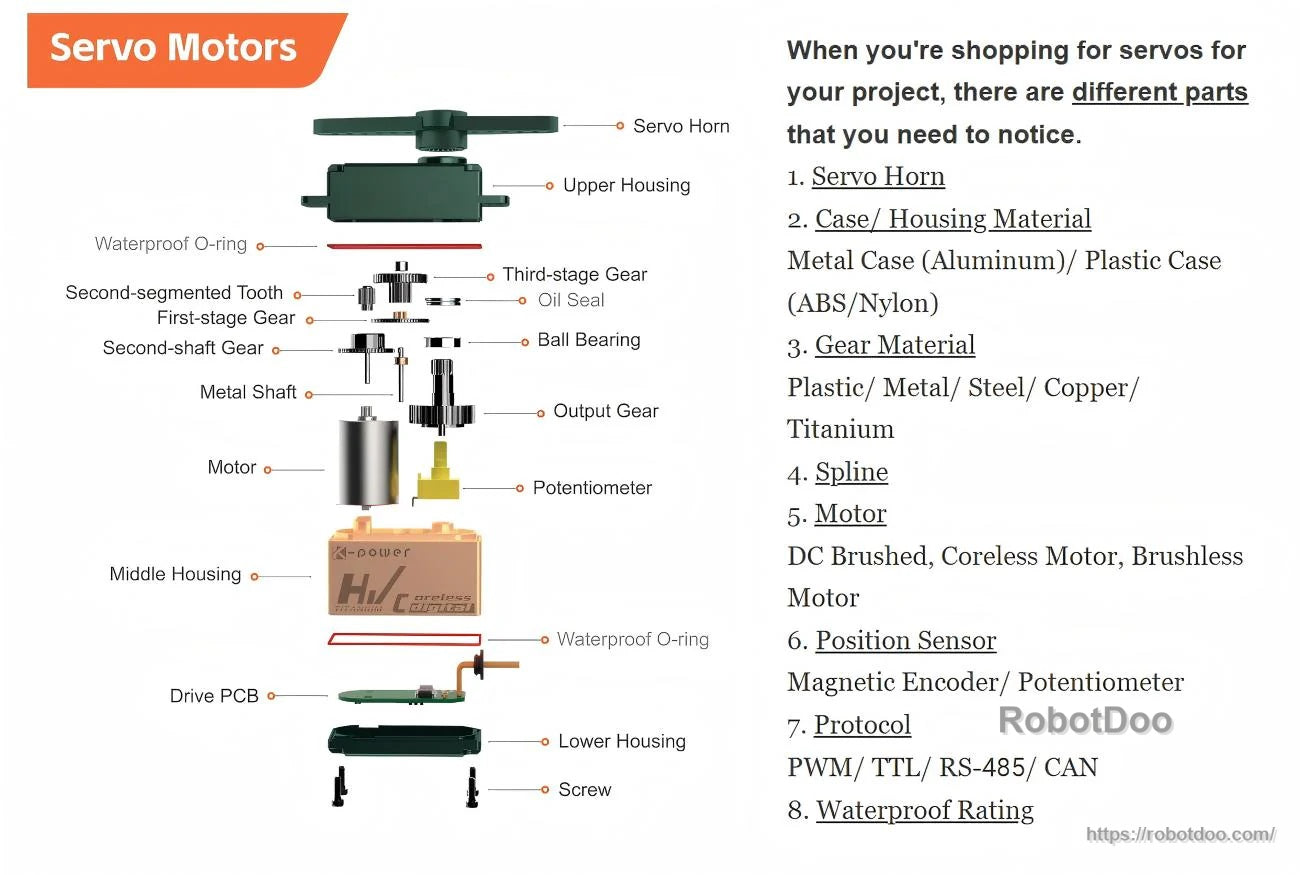
An internal breakdown highlights the core components that affect precision, durability, and feedback control.