Overview
The Kpower P0600 servo motor is a compact plastic-case servo designed for robotics and automation actuation, supporting multiple control protocols (PWM, TTL, and RS-485) with an operating voltage range of 4.8 ~ 8.4 V. It uses POM plastic gears, a potentiometer position sensor, and a 2BB bearing structure.
Key Features
- POM plastic gears; plastic case material
- Control protocol support: PWM | TTL | RS-485
- Operating voltage: 4.8 ~ 8.4 V (also presented as “Voltage up to 8.4V”)
- Position sensor: Potentiometer
- Ball bearing: 2BB
- 3-wire lead color reference: Brown = GND, Red = Vcc, Orange = Signal
- Markings shown: CE, FC, RoHS
Specifications
| Model | P0600 |
| Stall Torque | 6.8 kg (also shown as 6.8 kg.cm) |
| Rated Torque | 1.7 kg |
| No-load Speed | 0.13 s/60° |
| Weight | 40 g |
| Dimension | 40 × 20 × 37.5 mm (also shown as 40 × 20 × 43 mm) |
| Travel Angle Range | 120° (Customizable) |
| Operating Voltage | 4.8 ~ 8.4 V |
| Horn Gear Spline | 25T φ5.5 mm |
| Gear Material | POM |
| Motor | DC Brushed |
| Protocol | PWM | TTL | RS-485 |
| No-load Current | 1800 mA |
| Position Sensor | Potentiometer |
| Case Material | Plastic |
| Ball Bearing | 2BB |
| Working Frequency | 50 ~ 333 Hz (general note also mentions 50–300 Hz high-frequency compatibility) |
| Operating Temperature | -10 ~ 50°C |
| IP Rating | IP42 |
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
- Remote control cars and remote control boats
- Electronic locks and smart switches
Manuals
For integration questions (PWM pulse width settings, TTL/RS-485 wiring, and controller compatibility), contact this store’s customer service via the website contact form.
Control Signal Reference (PWM)
PWM reference shown: the servo expects a pulse every 20 ms; pulse width examples include 0.5 ms, 1 ms, 1.5 ms, 2 ms, and 2.5 ms corresponding to angles from -90° to 90°.
Details

A compact P0600 servo for robotics and automation, built with POM gears in a lightweight plastic case.

Designed for space-limited builds where low-noise, responsive actuation matters.
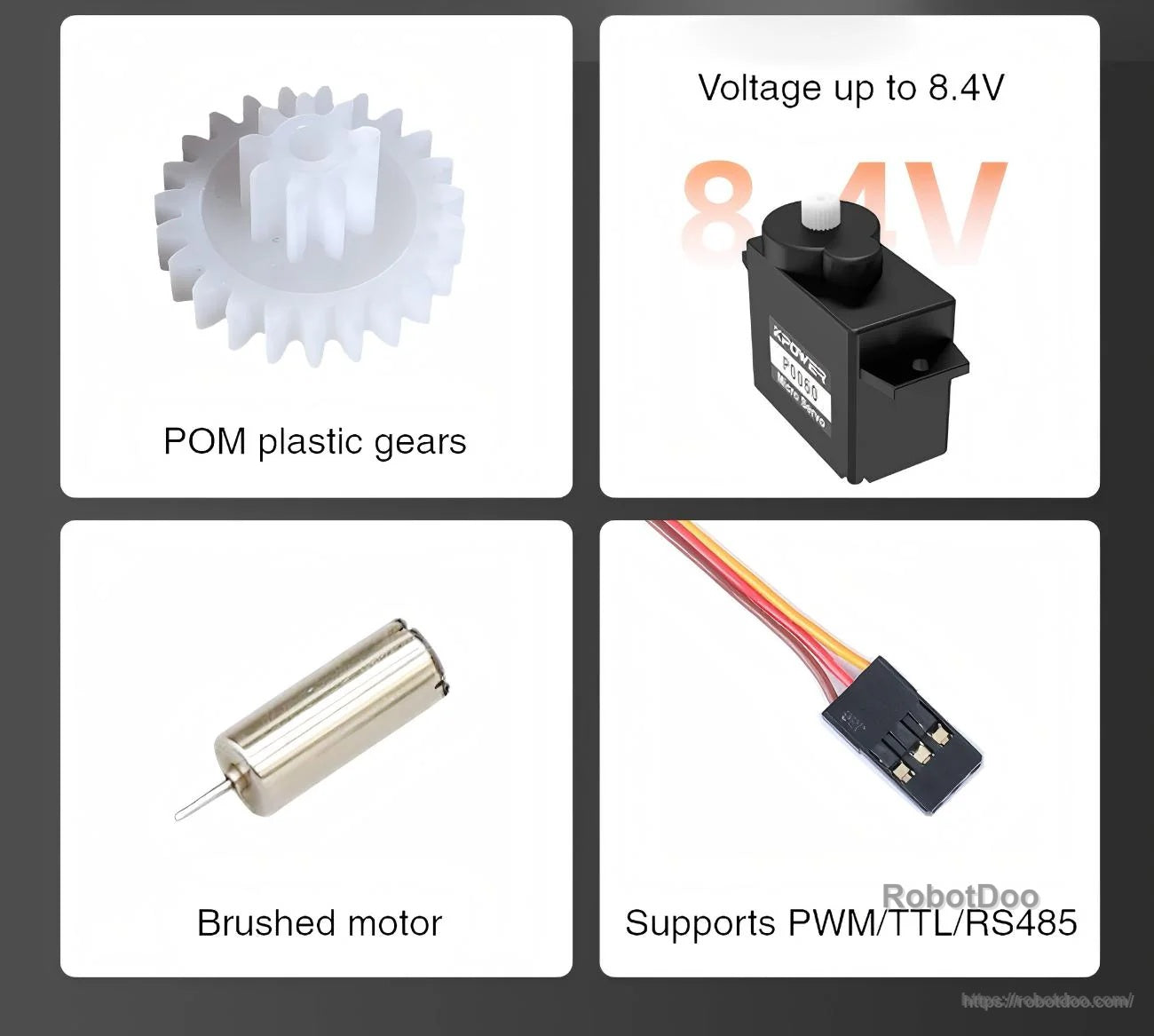
Key hardware and interface options include POM gears, a brushed DC motor, and PWM/TTL/RS-485 control.

At 40 g with 6.8 kg·cm stall torque and 0.13 s/60° speed, the P0600 balances power and size for small mechanisms.

Low-noise plastic gearing and a lightweight body help keep motion smooth in everyday PWM servo applications.

Match voltage, rotation angle, and control protocol to your controller before integrating a servo into a project.

Multiple horn styles make it easier to mount linkages, wheels, or brackets to the output shaft.
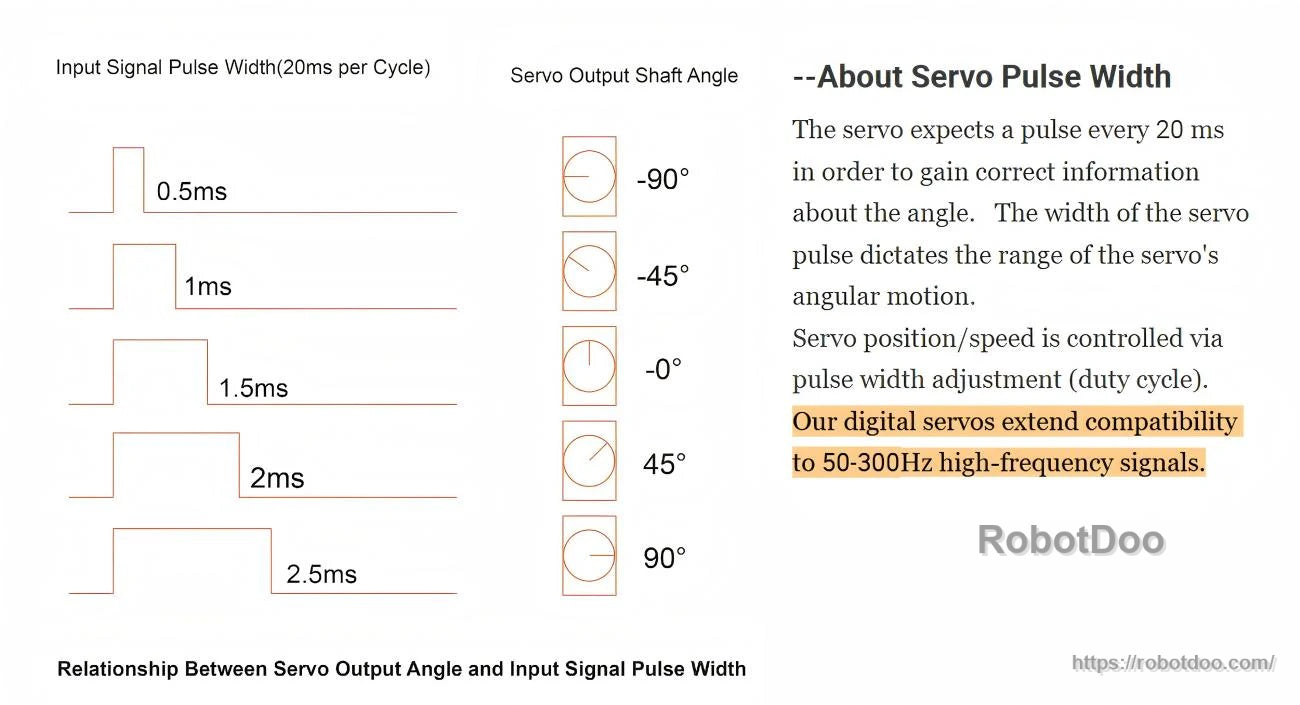
PWM control uses a 20 ms cycle; adjusting pulse width sets the output angle, with high-frequency signal compatibility noted.

Customization options may include protocol, wiring, and performance tuning for OEM/ODM projects.
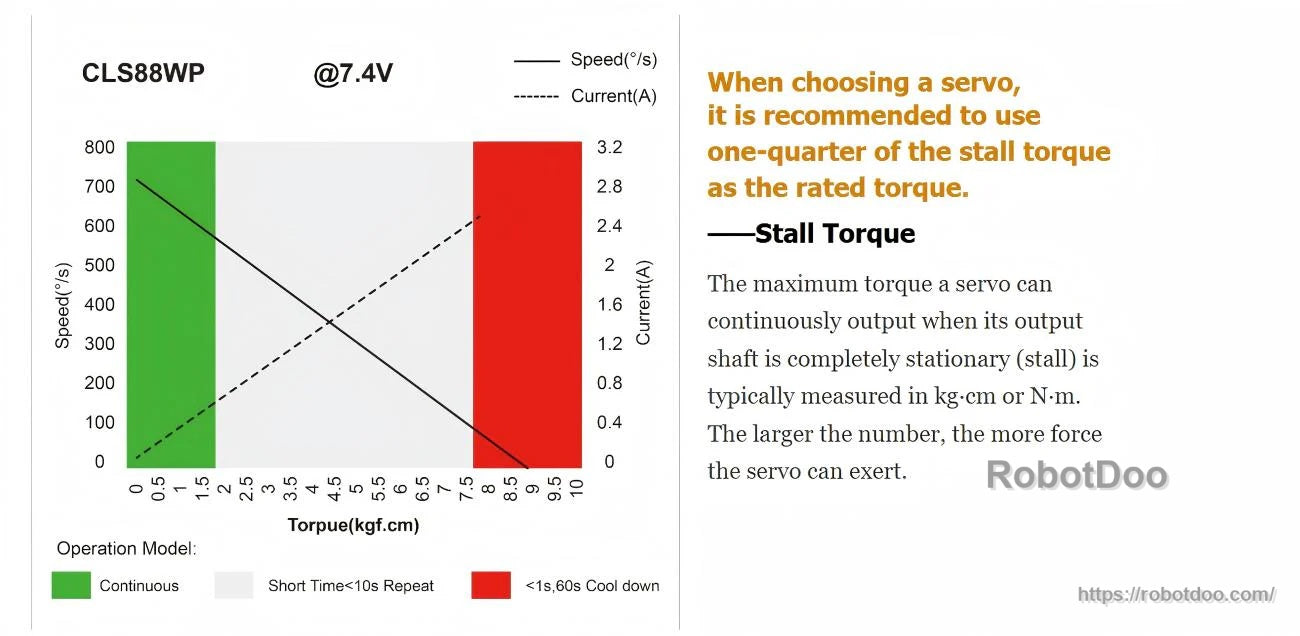
For long duty cycles, choose a working load closer to rated torque rather than relying on stall torque figures.
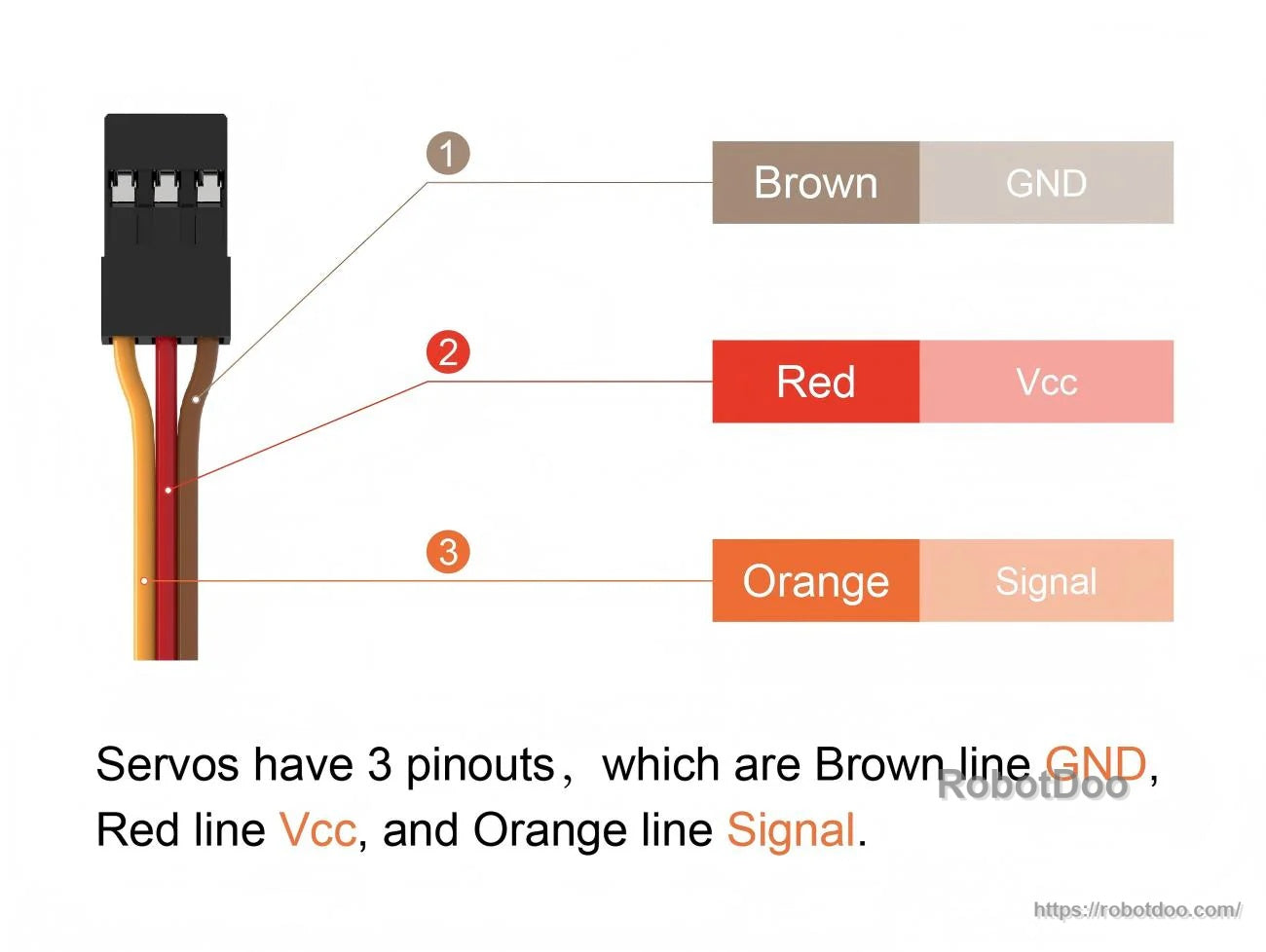
Standard 3-wire hookup: brown to GND, red to Vcc, and orange to the signal pin on your controller.

Internal layout includes a gear train driven by a DC motor with a potentiometer position sensor for feedback.