



Overview
Kpower RC05P Servo Motor is a compact robot servo motor for multi-scenario motion control in robotics and automation. The listing specifies PWM, TTL, and RS-485 control, and is presented for applications including humanoid robots, robotic arms, exoskeletons, quadruped robots, AGV vehicles, and ARU robots.
Key Features
- Control protocol (listing specification): PWM | TTL | RS-485
- Travel angle range (listing specification): 120° (customizable)
- Horn gear spline (listing specification): 25T, φ5.5 mm
- Position sensor (listing specification): potentiometer
- Gear material (listing specification): POM
- Motor type (listing specification): DC brushed
- Working frequency (listing specification): 50 ~ 333 Hz
- Environmental ratings (listing specification): operating temperature -10 ~ 50°C; IP42
Technical Specifications
| Stall Torque | 6.8 kg |
| Rated Torque | 1.7 kg |
| No-load Speed | 0.13 s/60° |
| Weight | 40 g |
| Dimension | 40 × 20 × 37.5 mm |
| Travel Angle Range | 120° (Customizable) |
| Operating Voltage | 4.8 ~ 8.4 V |
| Horn Gear Spline | 25T φ5.5 mm |
| Gear Material | POM |
| Motor | DC Brushed |
| Protocol | PWM | TTL | RS-485 |
| No-load Current | 1800 mA |
| Position Sensor | Potentiometer |
| Case Material | Plastic |
| Ball Bearing | 2BB |
| Working Frequency | 50 ~ 333 Hz |
| Operating Temperature | -10 ~ 50°C |
| IP Rating | IP42 |
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
Reference Text Shown in Product Graphics
- “Custom Servo Motor” / “Multiple Scenarios”
- Protocol options shown: PWM/TTL/RS-485/CAN
- Case options shown: Plastic/Metal/Aluminum Alloy
- Gear options shown: Plastic/Metal/Steel/Copper
- Travel angle options shown: 0~360° (120°/180°/270°)
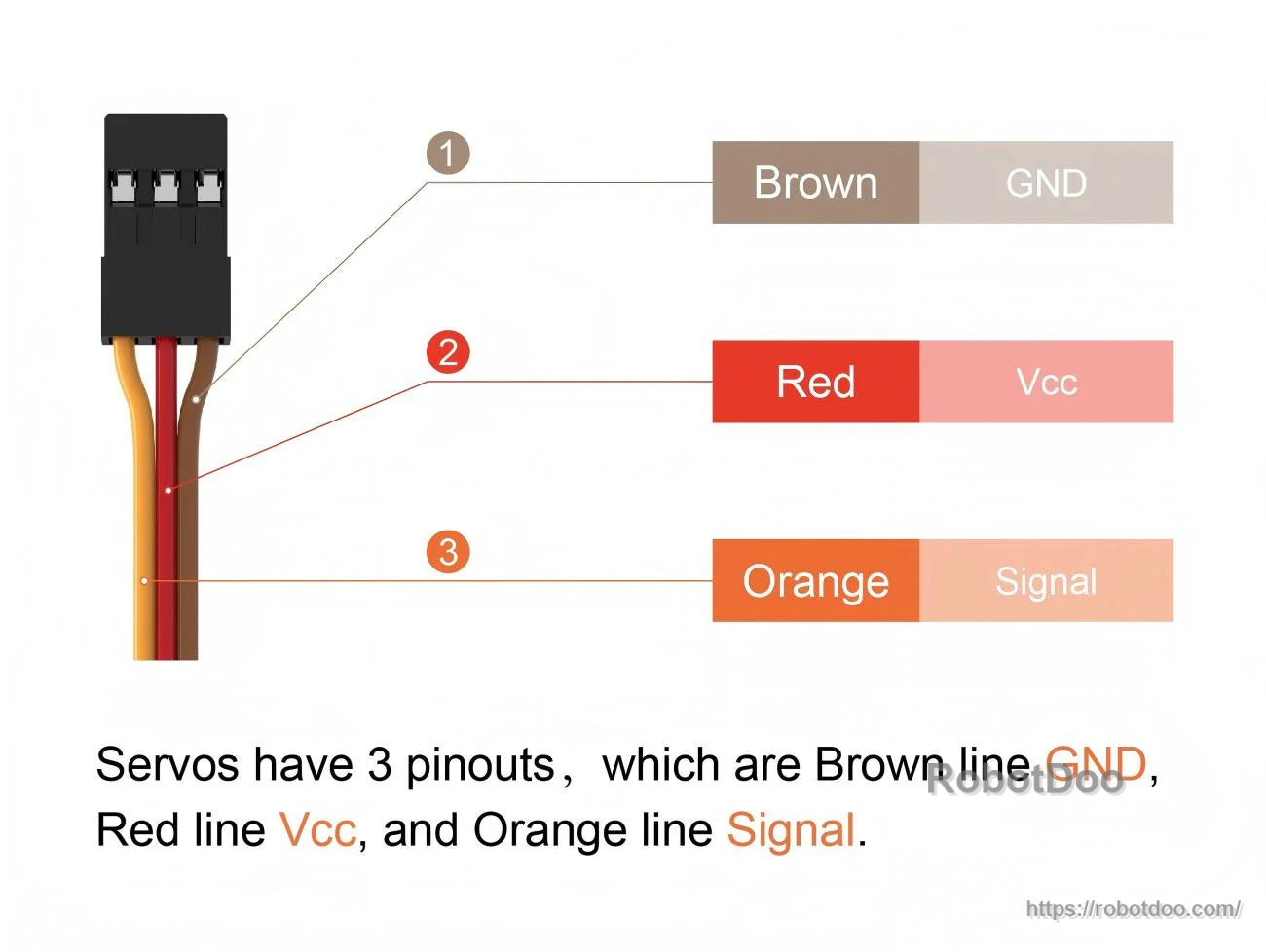
- Servo plug wire shown: JR, FUTABA
- “Robot Servo”: Dual-axes Robotic Servo; TTL Serial Bus Communication; Support Overload Clutch Mechanism
- Pulse width example text shown: input signal pulse width (20 ms per cycle) and output shaft angle mapping: 0.5 ms (-90°), 1 ms (-45°), 1.5 ms (-0°), 2 ms (45°), 2.5 ms (90°); note text: digital servos extend compatibility to 50-300 Hz high-frequency signals
- One RC05P graphic also shows: “RC05P --Magnetic Encoder Robotic Servo” with specifications listed as torque 5 kg.cm @ 6.0 V, speed 0.07 sec/60 @ 6.0 V, size 23*12*28 mm, weight 24.4 g, motor coreless motor, gear metal; application text shown: multi-legged robots, educational robots, smart camera gimbal, smart home, micro industrial automation, desktop robot arm
Manuals
Details

A compact Kpower RC05P servo motor platform for robotics, with multiple control protocol options and travel-angle configurations.

Serial-bus communication and overload clutch options support smoother motion control for multi-joint robotic designs.

Key model details are summarized on the graphic, including encoder type, motor/gear configuration, and basic performance figures.

Use torque, speed, voltage, and size as the main checkpoints when choosing a servo for your robot or automation project.

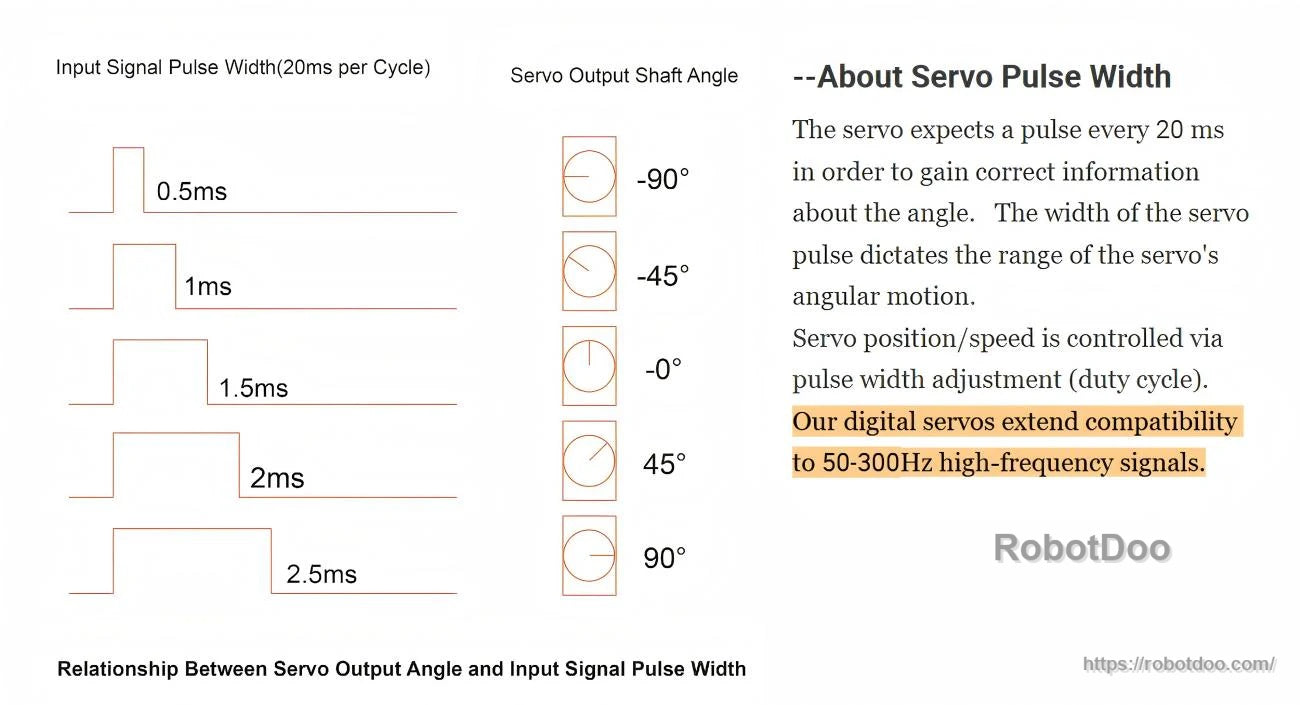
PWM pulse width determines target position, and higher-frequency signals can be used on compatible digital servos.

Customization options can cover housing style, wiring/connector choices, control interface, and protective design requirements.
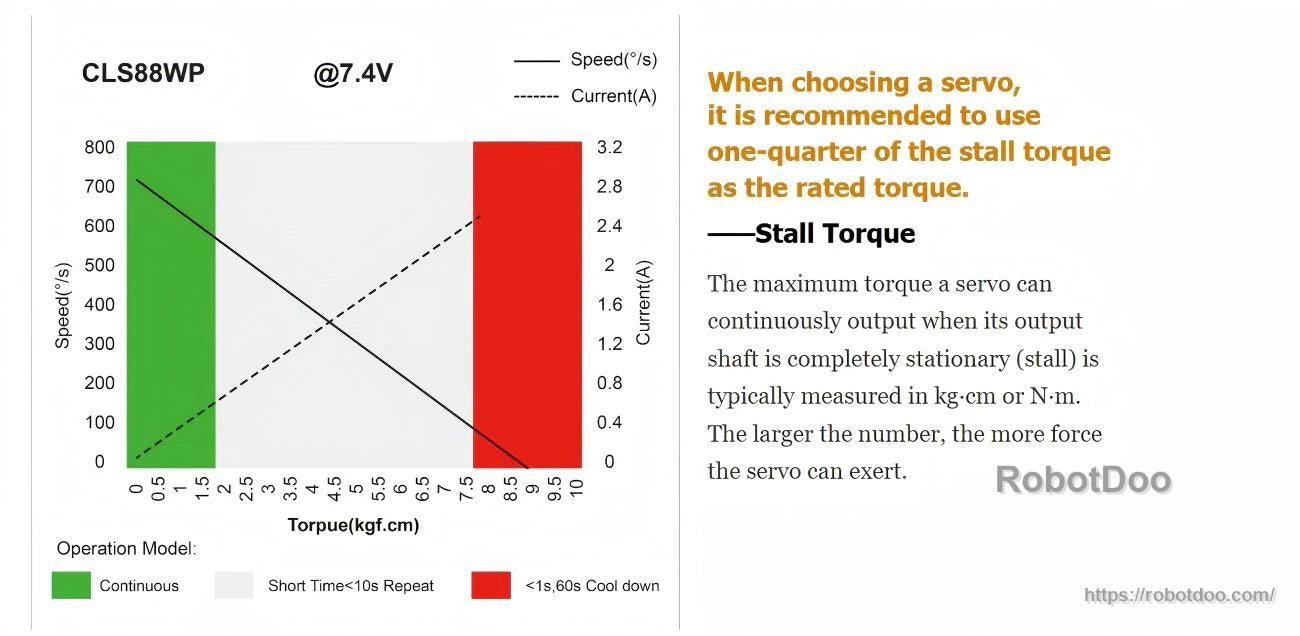
For longer duty cycles, continuous rated torque is typically chosen well below stall torque to reduce heat and stress.

Component breakdown highlights typical internal parts such as gears, bearings, position sensor, and seals that affect performance.
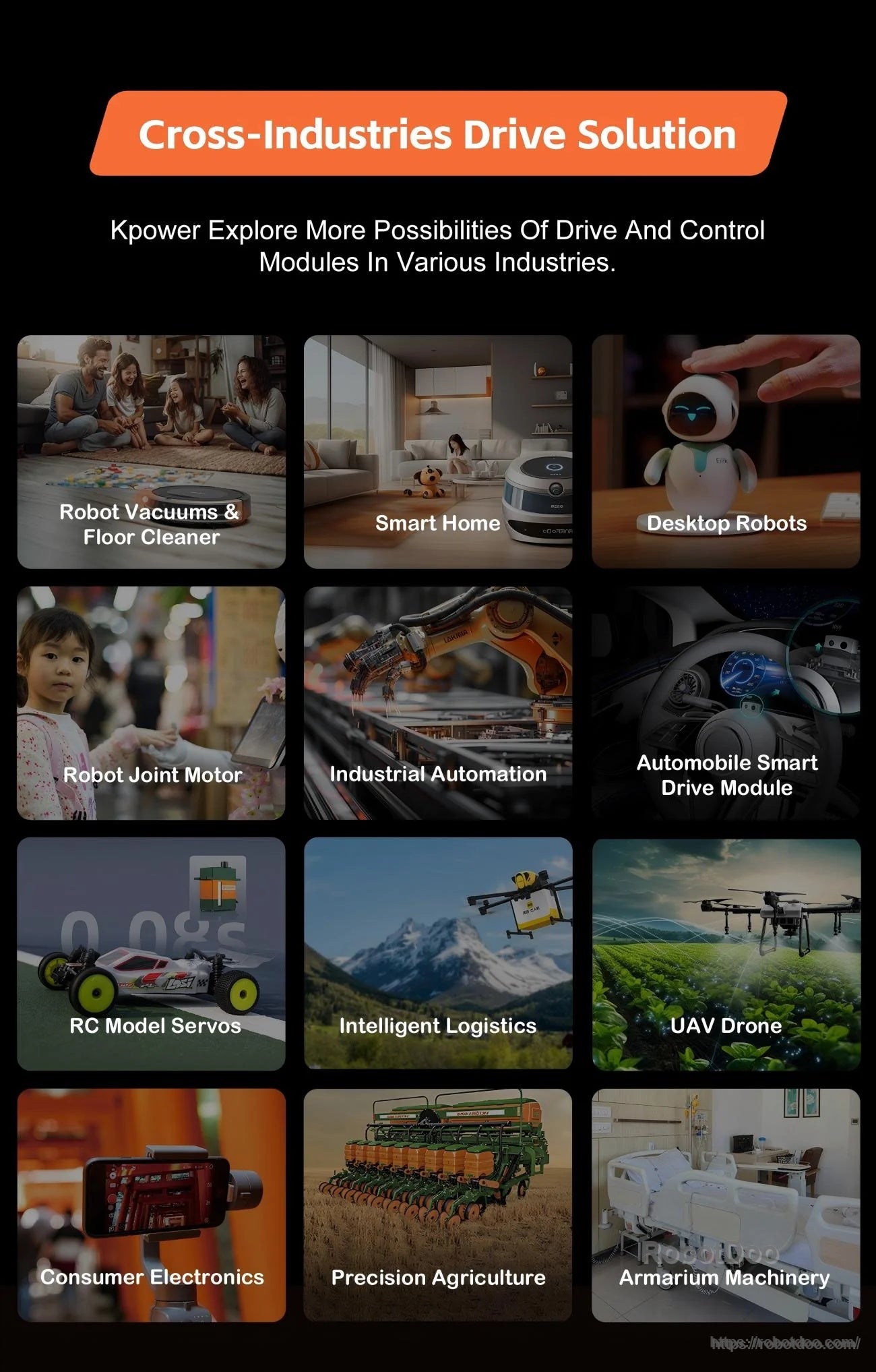
Kpower drive and control modules are used across robotics, smart home devices, industrial automation, logistics, and UAV platforms.




