Overview
Kpower RC20P is a robotic servo motor designed for compact, high-torque joint and linkage actuation. It uses a coreless motor with metal gears, supports multiple control protocols (PWM | TTL | RS-485), and is specified for 4.8 ~ 8.4 V operation. The travel angle range is listed as 180° (customizable).
Key Features
- Coreless motor, metal gear train
- Multi-protocol control: PWM | TTL | RS-485
- Aluminum alloy case material; 2BB (dual ball bearing)
- Position sensor: potentiometer
- Working frequency: 50 ~ 333 Hz (also shown as compatible with 50–300 Hz high-frequency signals)
- Horn/servo arm styles shown: Flat, Cross, Round, Star, Single
For customization requests (appearance, torque, protocols, wiring sequences, reliability options such as waterproofing and low-temperature resistance), contact customer service via the store support channel.
Specifications
| Model | RC20P |
| Stall Torque | 21 kg (also shown as 21 kg.cm @ 7.4 V) |
| Rated Torque | 5.3 kg |
| No-load Speed | 0.2 s (also shown as 0.2 sec/60 @ 7.4 V) |
| Weight | 65 g |
| Dimension | 40 × 20 × 37 mm (also shown as 40*20*37 mm) |
| Travel Angle Range | 180° (Customizable) |
| Operating Voltage | 4.8 ~ 8.4 V |
| Horn Gear Spline | 25T φ6 mm |
| Gear Material | Metal |
| Motor | Coreless Motor |
| Protocol | PWM | TTL | RS-485 |
| No-load Current | 7000 mA |
| Position Sensor | Potentiometer |
| Case Material | Aluminum Alloy |
| Ball Bearing | 2BB |
| Working Frequency | 50 ~ 333 Hz |
| Operating Temperature | -10 ~ 50°C |
| IP Rating | IP42 |
Control & Wiring Notes
- Input signal pulse width (20 ms per cycle) examples shown: 0.5 ms, 1 ms, 1.5 ms, 2 ms, 2.5 ms
- Servo output shaft angle examples shown: -90°, -45°, -0°, 45°, 90°
- 3-pin wiring (shown): Brown = GND, Red = Vcc, Orange = Signal
- Servo dead band (general note shown): Analog 1~5 us (Our Servo: 4 us); Digital 1~3 us (Our Servo: 2 us)
- Rotation angle options (general note shown): 120°, 180°, 270°, 360°
- Speed reference (general note shown): Standard Speed 0.10~0.15 s/60° (~65 RPM); Attainable Speed 0.3 s/60° (~33 RPM)
- Operating voltage reference (general note shown): Standard Voltage 4.8 V~7.4 V; High Voltage > 7.4 V
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
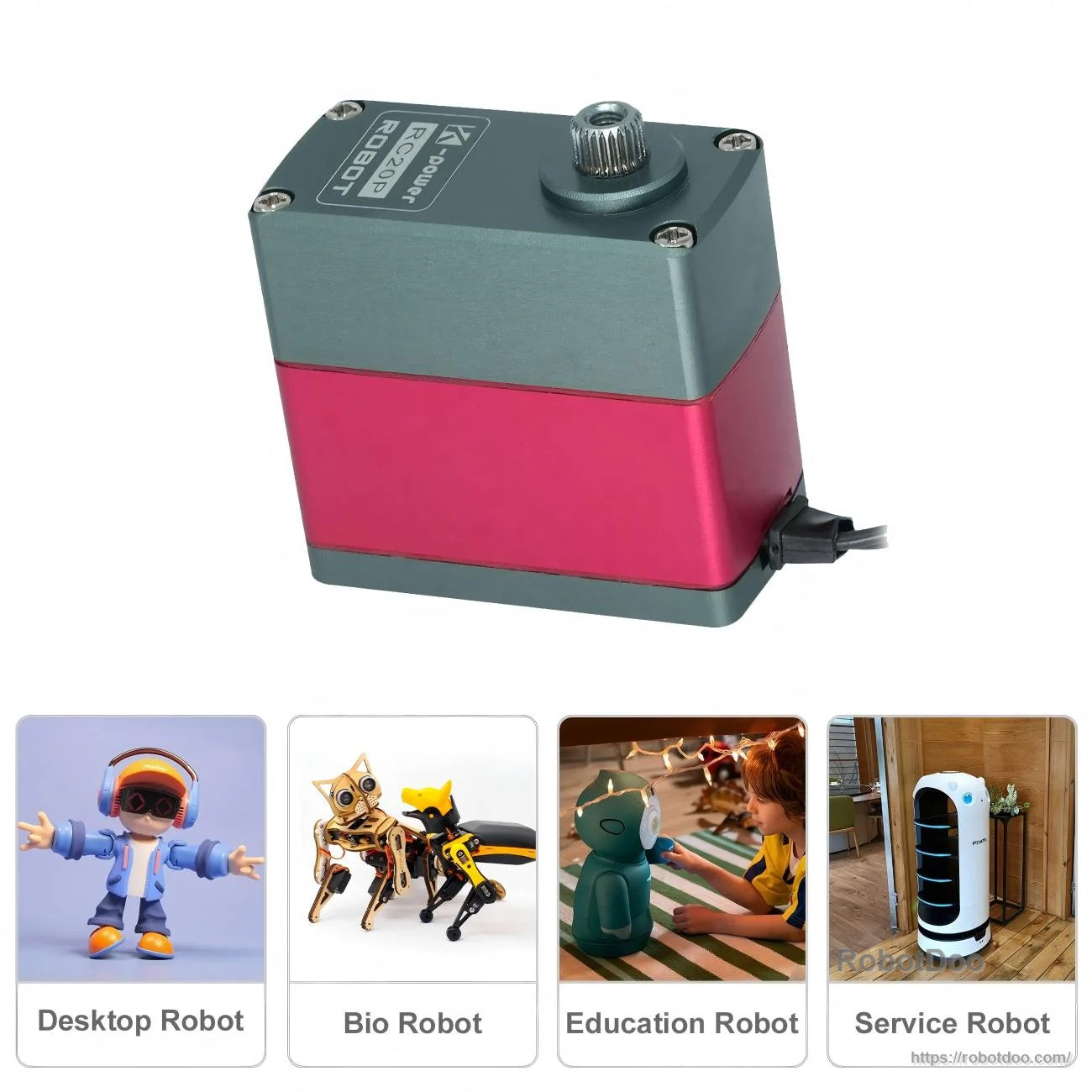
- Bio robot, education robot, service robot, desktop robot arm
- Solar panel cleaning robot
- Remote control car
- Fixed wing drone
- Industrial automation, intelligent logistics, consumer electronics (industry examples shown)
Manuals
Details
The Kpower RC20P robotic servo motor is built for compact joints and linkages, combining a coreless motor with a metal gear train.

Key specs at a glance include 21 kg·cm stall torque (7.4 V), 0.2 s/60° speed, 40×20×37 mm body, and 65 g weight.

Use these references to compare rotation range, speed, and voltage when selecting a servo for your mechanism.

Multiple horn styles help match common linkages and mounting patterns for robot arms and custom joints.
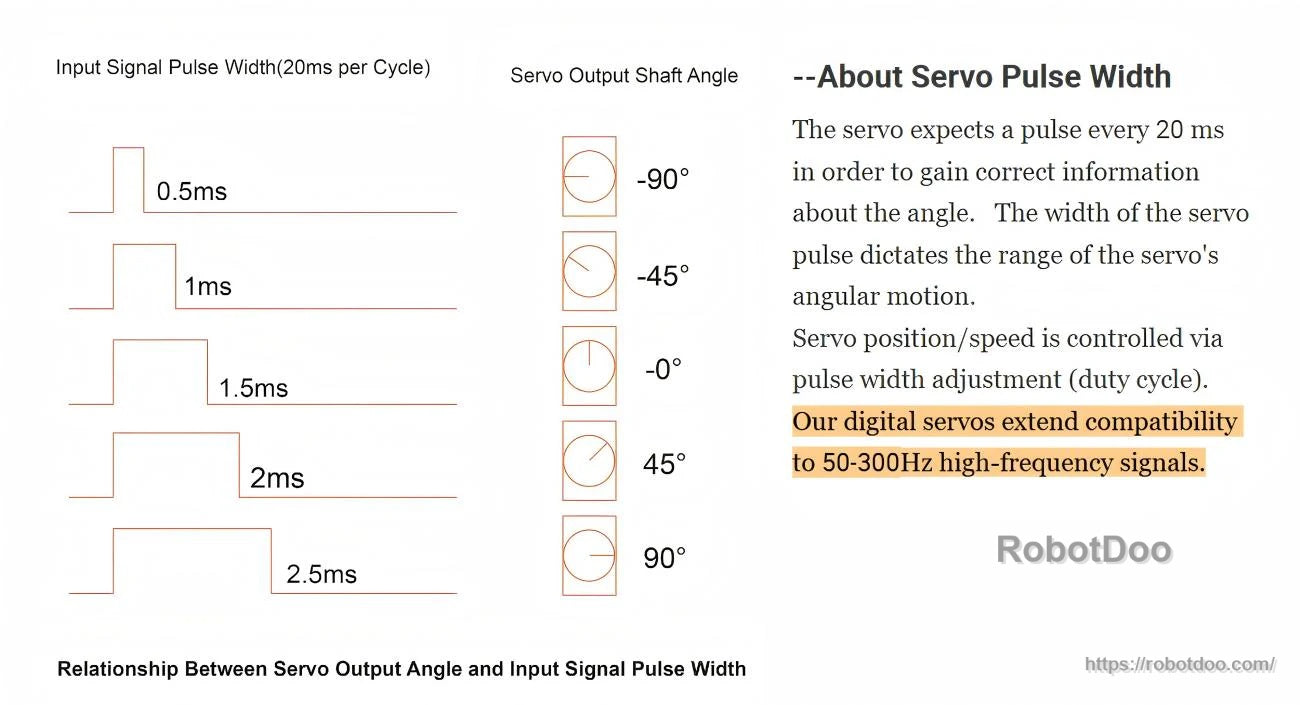
Standard PWM control uses a 20 ms cycle; changing pulse width sets target position and effective travel range.

Customization can cover appearance, torque tuning, control protocols, and wiring sequences, with reliability options like waterproofing.
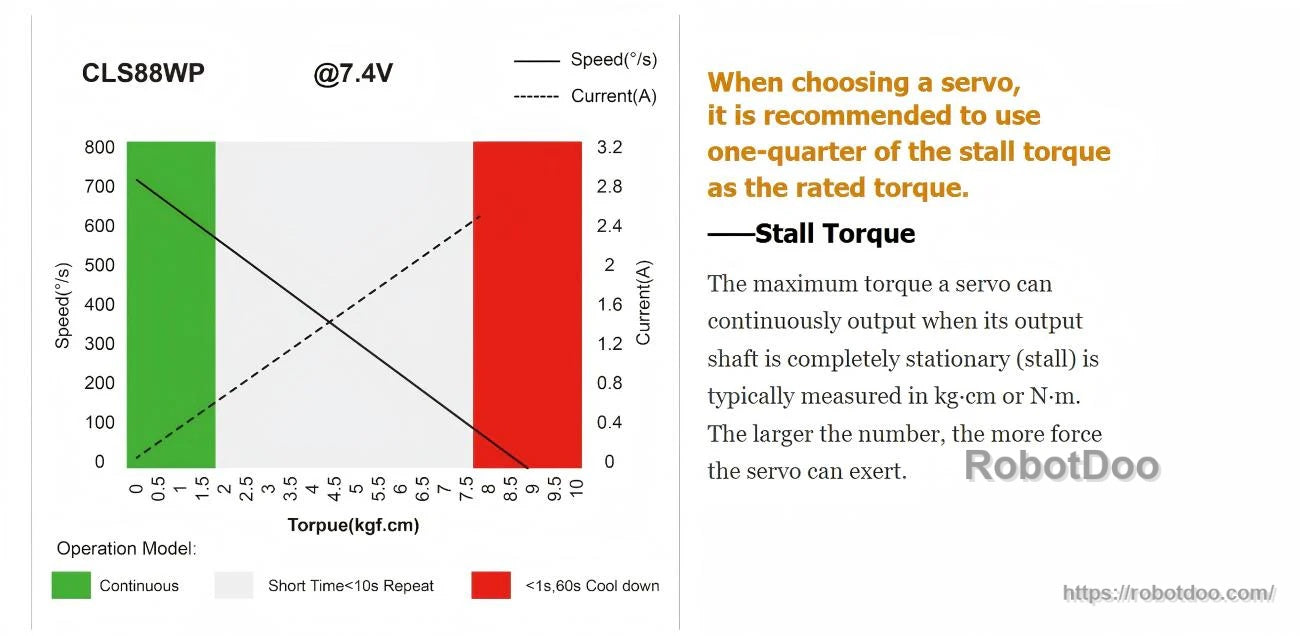
For continuous use, sizing around one-quarter of stall torque helps reduce heat buildup and improves long-term stability.
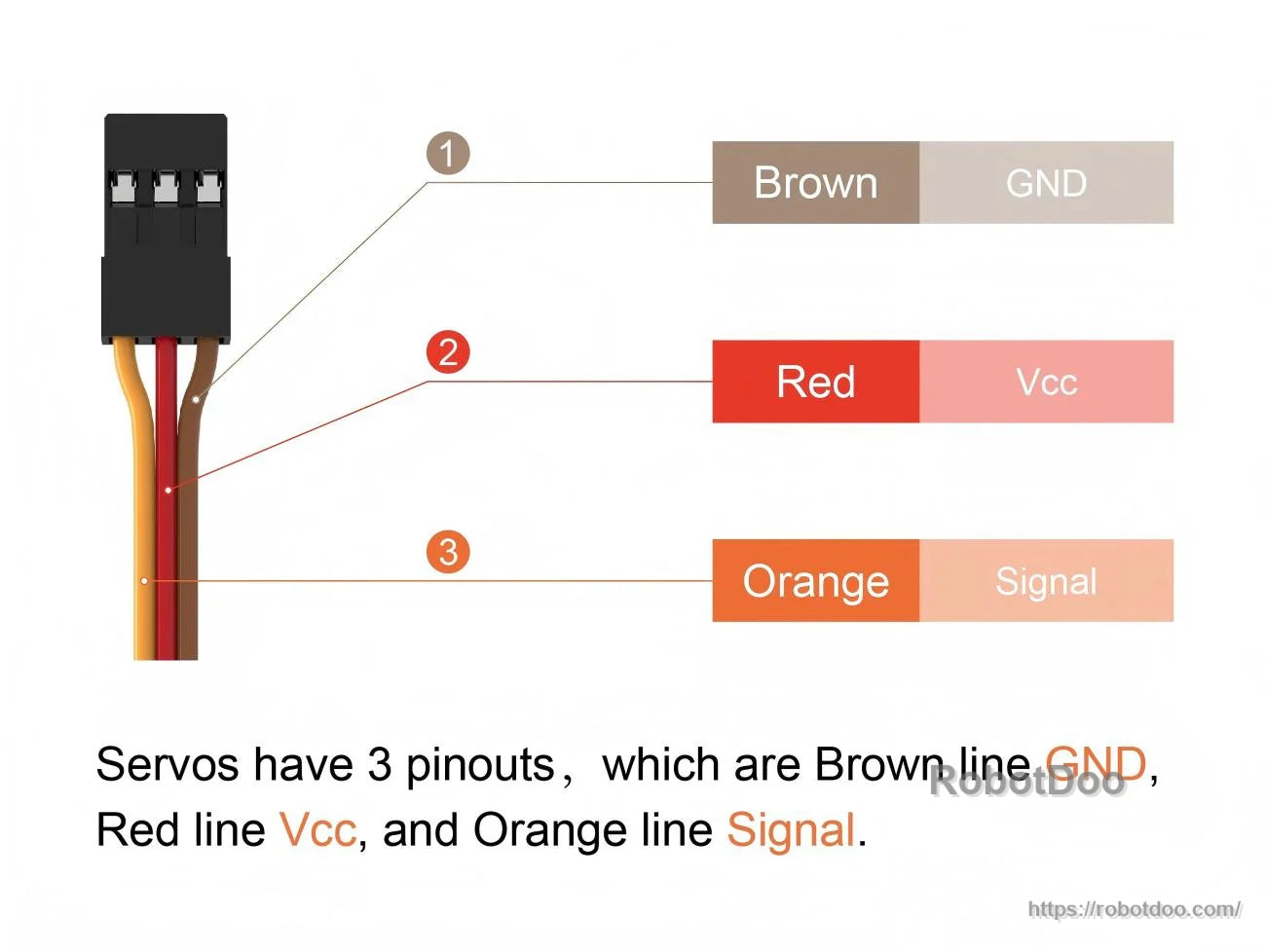
Wiring follows the common 3‑pin layout: brown ground, red power, and orange control signal.

A metal gear train, ball bearing support, and potentiometer feedback work together for precise positioning under load.
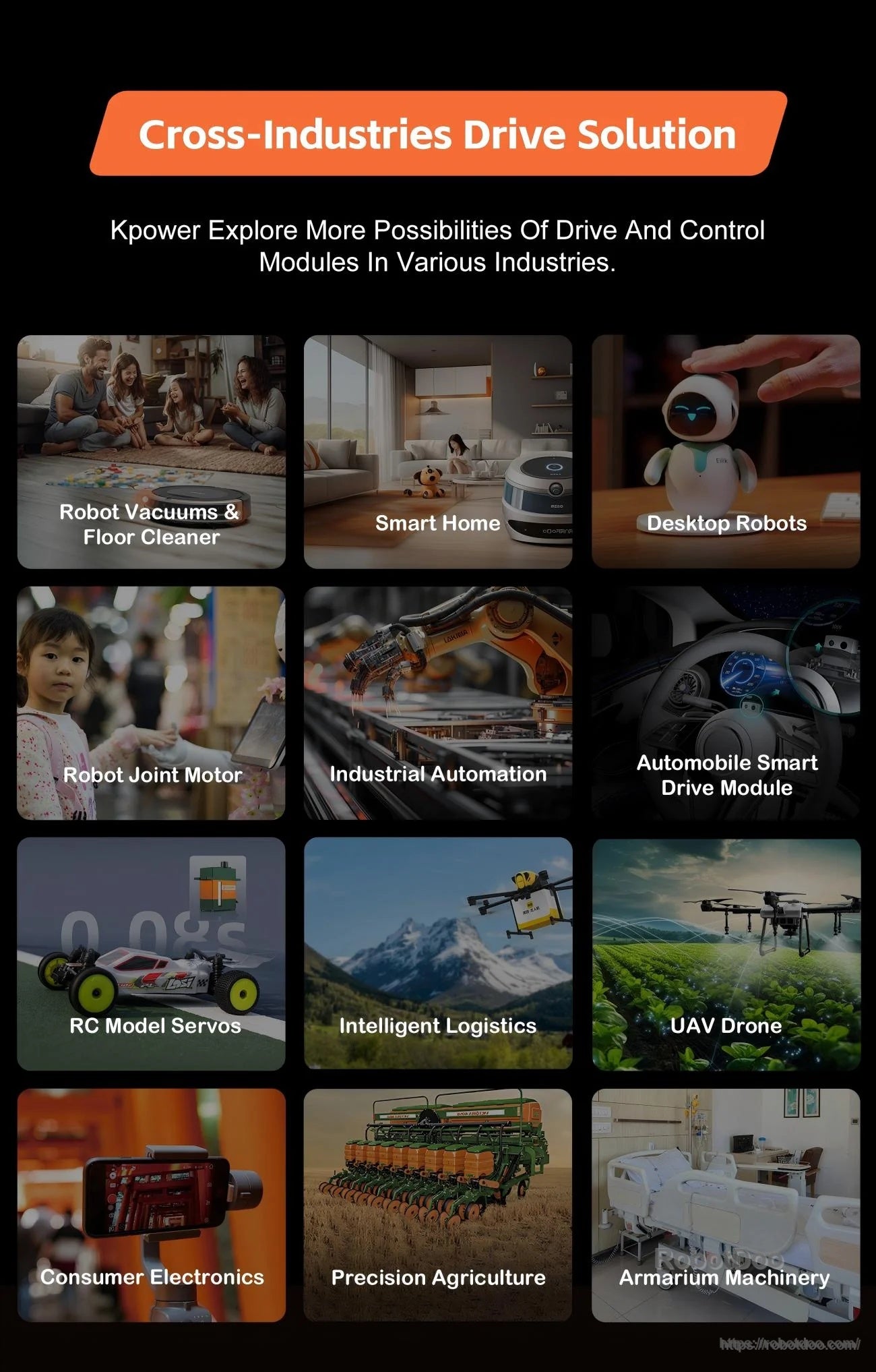
Suitable for robotics and automation projects such as robot arms, AGV platforms, industrial mechanisms, and UAV payloads.

ODM support follows a structured path from requirements and design through sampling and production readiness.