


Overview
The Kpower RC30P Servo Motor is a compact, aluminum-alloy cased, coreless servo motor designed for robotics and motion-control projects requiring high torque and fast response. It supports a 25T (phi6 mm) output spline and a 3-wire servo lead (JR/FUTABA pinout), with a listed travel angle of 120 degrees (customizable).
Key Features
- Coreless motor with metal gears
- Aluminum alloy case; 2BB (dual ball bearings)
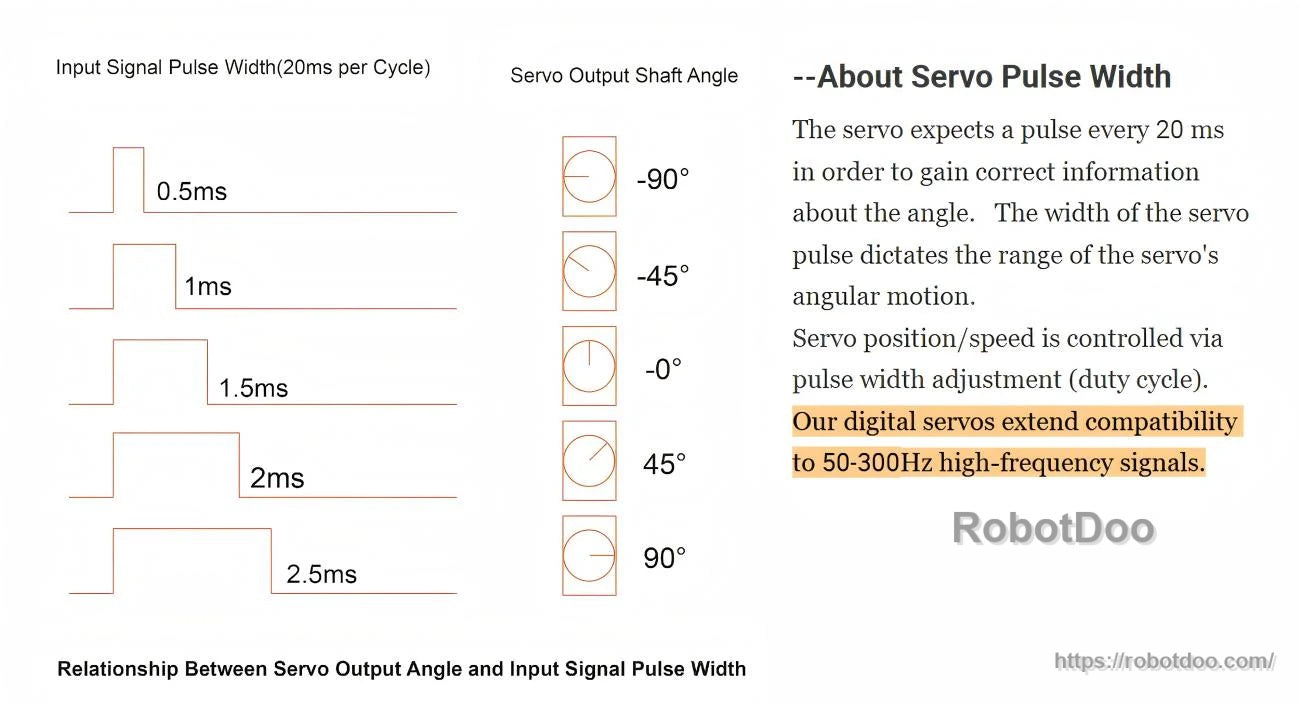
- High-frequency operation listed at 50 to 333 Hz (also referenced as compatible with 50 to 300 Hz high-frequency signals)
- Standard PWM servo pulse timing reference: 20 ms cycle; example pulse widths 0.5/1.0/1.5/2.0/2.5 ms mapped to -90/-45/0/45/90 degrees
- Servo lead pinout reference: Brown = GND, Red = Vcc, Orange = Signal
Specifications
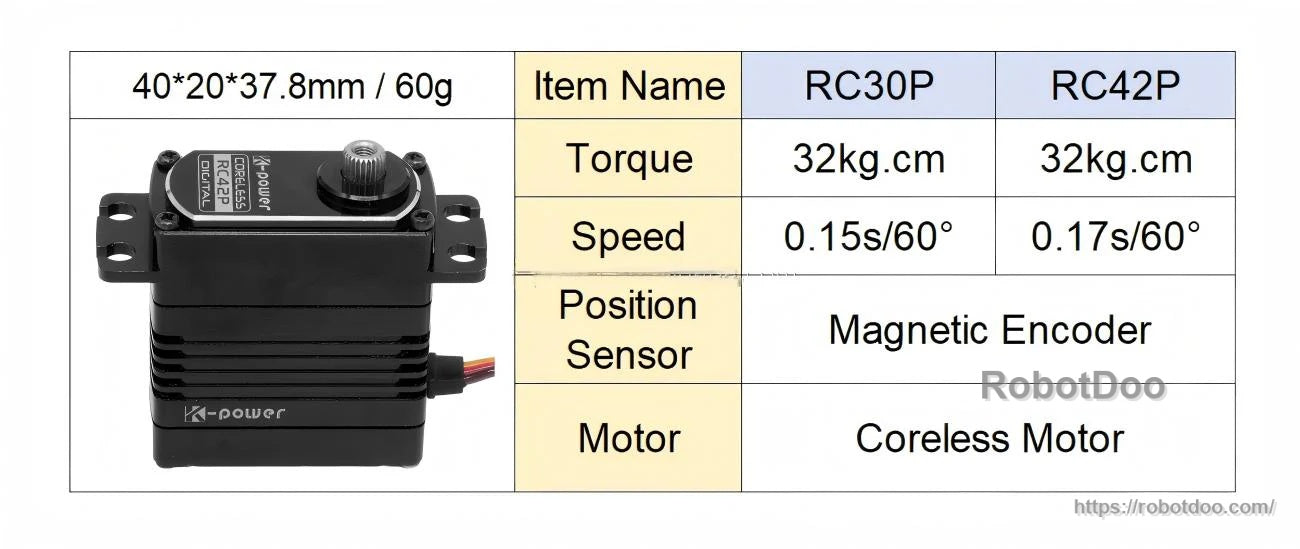
| Model | RC30P |
| Stall Torque | 32 kg (also shown as 32 kg.cm at 7.4 V) |
| Rated Torque | 8 kg |
| No-load Speed | 0.15 s/60 degrees (also shown as 0.15 sec/60 degrees at 6.0 V) |
| Weight | 60 g |
| Dimensions | 40 x 20 x 37.8 mm |
| Travel Angle Range | 120 degrees (customizable); standard angles referenced: 120/180/270/360 degrees |
| Operating Voltage | 4.8 ~ 8.4 V (also referenced: standard 4.8 ~ 7.4 V; high voltage > 7.4 V) |
| Horn Gear Spline | 25T, phi6 mm |
| Gear Material | Metal |
| Motor Type | Coreless |
| Protocol | PWM | TTL | RS-485 (some materials also mention CAN) |
| No-load Current | 4000 mA |
| Position Sensor | Magnetic encoder (some provided specs list potentiometer) |
| Case Material | Aluminum alloy |
| Ball Bearing | 2BB |
| Working Frequency | 50 ~ 333 Hz |
| Operating Temperature | -10 ~ 50 C |
| IP Rating | IP42 |
| Servo Plug Wire | JR, FUTABA |
| Horn Types Referenced | Flat, Cross, Round, Star, Single |
Applications
- Humanoid robots, quadruped robots, exoskeletons
- Robotic arms, desktop robots, education robots
- AGV vehicles, industrial automation, service robots
- Scale remote control cars; fixed-wing drones
- Table tennis serving machines
Manuals
Details

Designed for compact, high-torque robotics builds, the RC30P combines a coreless motor, metal gears, and an aluminum-alloy case.

Communication and protection options support multi-servo systems, including TTL serial bus control and an overload clutch mechanism.
Key dimensions and performance at a glance: 40×20×37.8 mm body, 60 g weight, and fast 0.15 s/60° response.

A magnetic encoder position sensor and metal geartrain help deliver stable, repeatable motion for arms, joints, and mobile robots.

Rotation angle options and voltage ranges help match the servo to your control system and duty cycle.

Multiple horn styles make it easier to fit different linkages, brackets, and output geometries.
Standard PWM timing is supported, with compatibility for higher-frequency control signals for faster update rates.

OEM/ODM customization options can cover protocols, wiring, and protective design choices when a standard configuration isn’t enough.
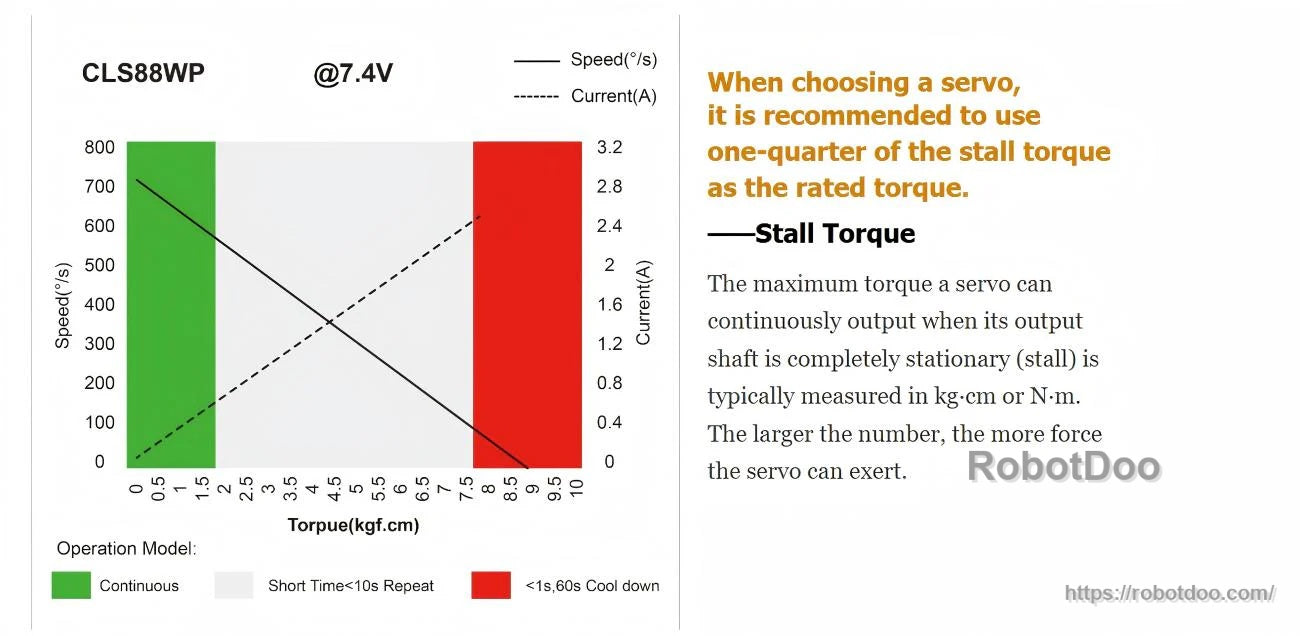
For continuous operation, selecting around one-quarter of stall torque as the rated load helps improve reliability.
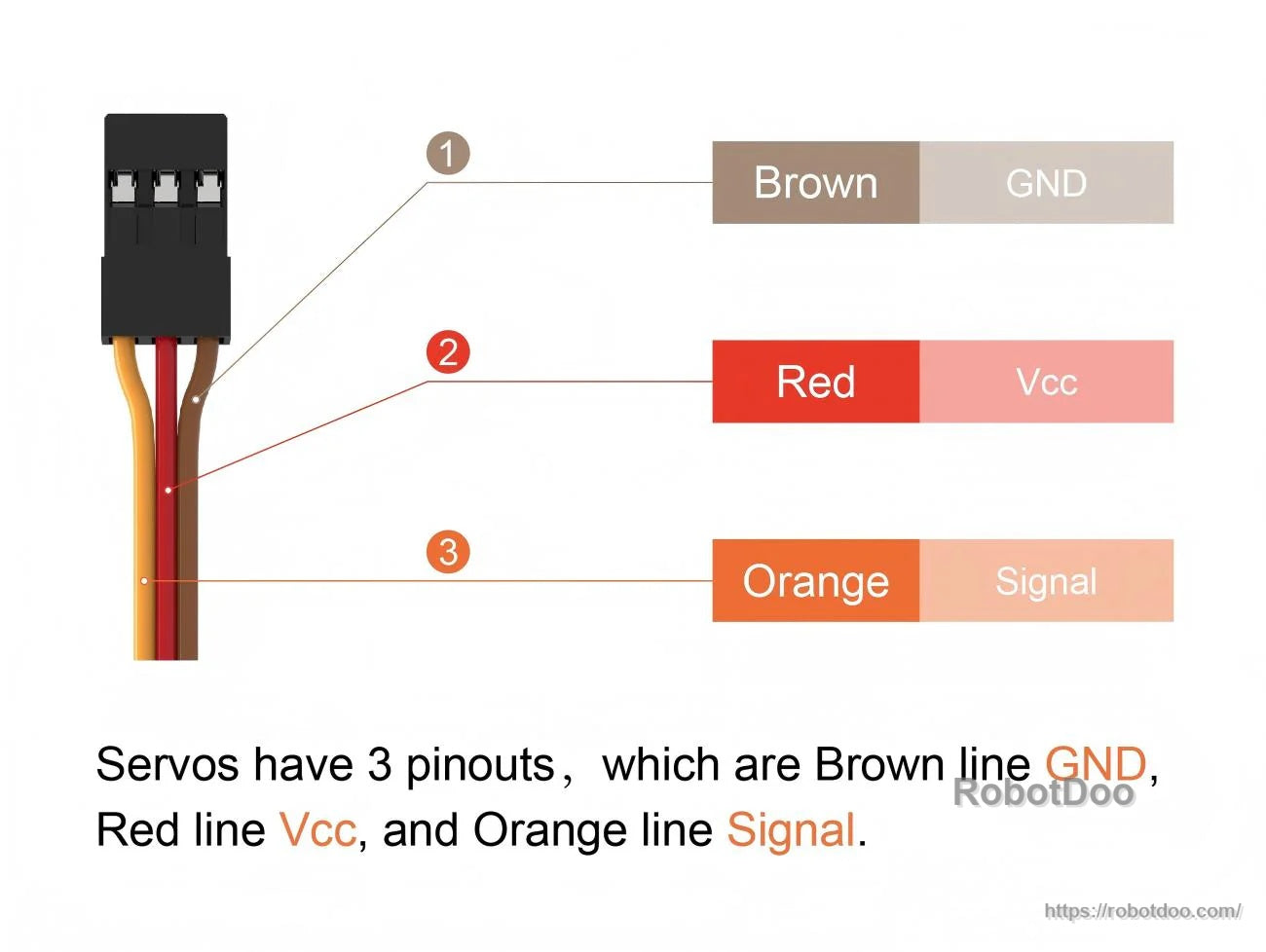
JR/FUTABA-style wiring keeps installation straightforward: brown GND, red Vcc, orange signal.

Internal component layout highlights the typical elements that affect accuracy and durability, including bearings, gears, and sensor.
Suitable for a wide range of automation and robotics use cases, from desktop robots to industrial and logistics projects.
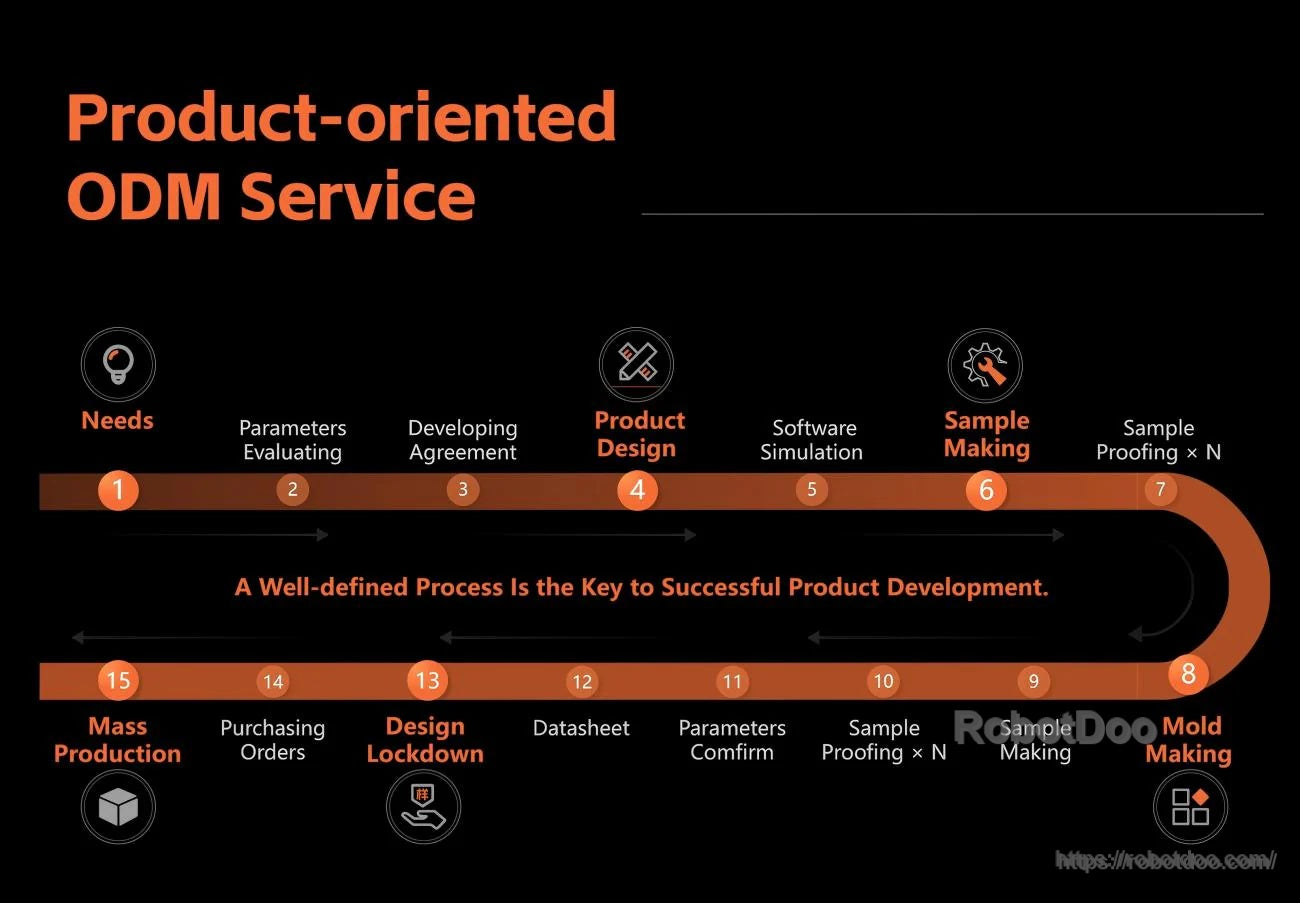
A structured development workflow supports prototyping through production for teams building custom motion-control solutions.


