Product Description
This large hollow shaft BLDC motor is designed for robot joint applications, delivering high torque at low speed. The outrunner structure provides higher torque density, while the hollow shaft enables flexible integration for wiring and mechanical assemblies.
Key Features
- Hollow shaft design for easy integration
- High torque output at low speed
- Outrunner BLDC structure
- Suitable for robot joints and actuators
- Multiple sizes for different load requirements
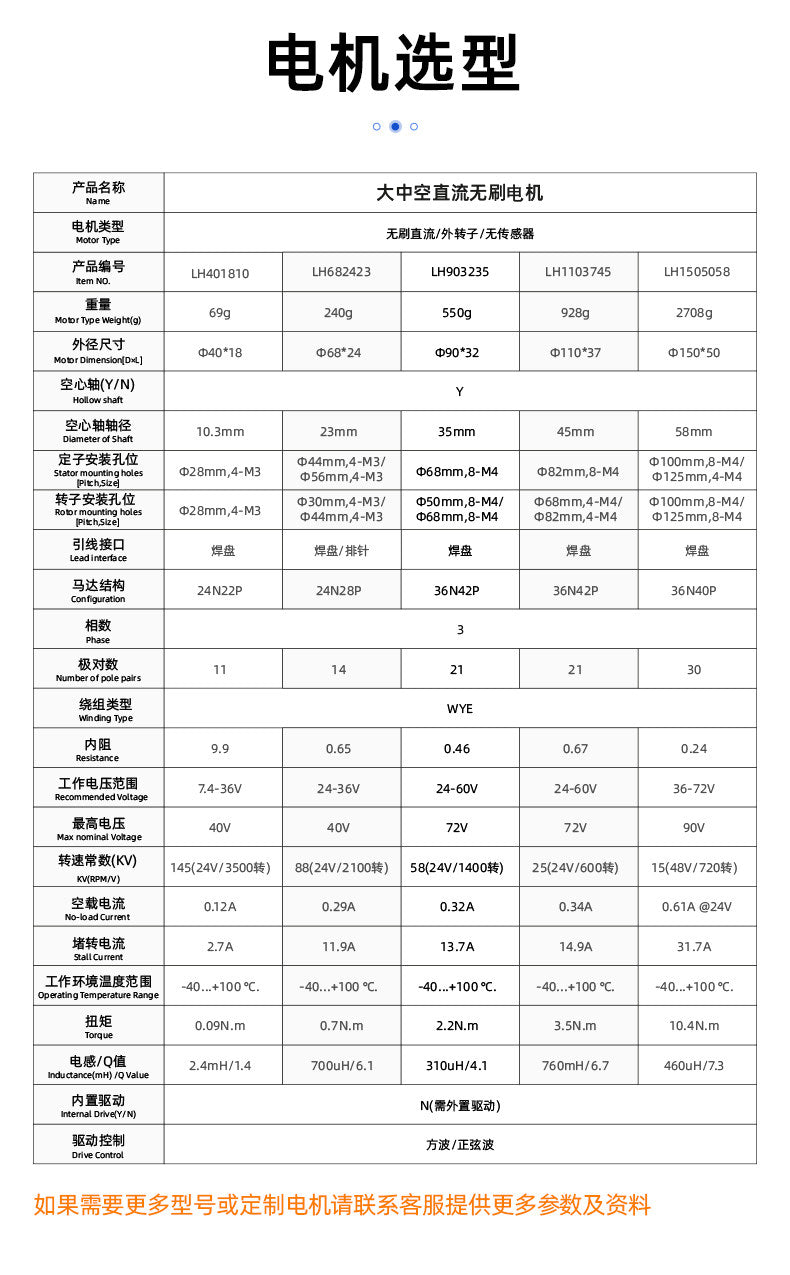
Variants (All from Images)
LH401810
- Size: Ø40 × 18 mm
- Hollow Shaft: 10.3 mm
- Torque: 0.09 N·m
- Voltage: DC 7.4–36V
- KV: 145 (24V / 3500 rpm)
LH462115 (NEW)
- Size: Ø46 × 21 mm
- Hollow Shaft: 15 mm
- Torque: 0.15 N·m
- Voltage: DC 7.4–24V
- KV: 108 (24V / 2600 rpm)
LH682423
- Size: Ø68 × 24 mm
- Hollow Shaft: 23 mm
- Torque: 0.7 N·m
- Voltage: DC 24–36V
- KV: 88 (24V / 2100 rpm)
LH803520 (NEW)
- Size: Ø80 × 35 mm
- Hollow Shaft: 20 mm
- Torque: 1.3 N·m
- Voltage: DC 24–48V
- KV: 77 (24V / 1850 rpm)
LH903235
- Size: Ø90 × 32 mm
- Hollow Shaft: 35 mm
- Torque: 2.2 N·m
- Voltage: DC 24–60V
- KV: 58 (24V / 1400 rpm)
LH1103745
- Size: Ø110 × 37 mm
- Hollow Shaft: 45 mm
- Torque: 3.5 N·m
- Voltage: DC 24–60V
- KV: 25 (24V / 600 rpm)
LH1505058
- Size: Ø150 × 50 mm
- Hollow Shaft: 58 mm
- Torque: 10.4 N·m
- Voltage: DC 36–72V
- KV: 15 (48V / 720 rpm)

General Specifications
- Motor Type: Brushless DC Outrunner
- Phase: 3 Phase
- Winding Type: WYE
- Drive: External Driver Required
- Control: Square Wave / Sine Wave
- Operating Temperature: -40°C to +100°C
Applications
- Humanoid robot joints
- Robotic arms
- Exoskeleton systems
- Industrial automation
- Precision motion systems
Notes
- External motor driver required
- Select KV and voltage based on speed/torque needs
- Ensure proper screw length to avoid internal damage