



Overview
The LKMTECH MF5010-V2 motor is designed for robotics actuation where integrated design, lightweight design, high control accuracy, and high torque output are required. It supports PWM input and provides CAN or RS485 communication with multiple baud rate options. The MF5010-V2 update includes encoder resolution upgraded from 14-bit to 18-bit and cogging torque optimization.
Key Features
- Integrated design: mechanical-electrical integration
- Lightweight design: flattening design of aerospace aluminium alloys
- High control accuracy: magnetic encoder (update notes 14-bit upgraded to 18-bit; specifications list 18-bit magnetic encoder)
- High torque output: high performance RbFeB permanent magnet
- Supports PWM input
- CAN and RS485 communication support a variety of baud rates
- Control modes: Torque Loop (24KHz) / Speed Loop (8KHz) / Position Loop (8KHz)
- Acceleration curve: Trapeziod acceleration
Specifications
| Parameter | MF5010-V2 (Turns: 10) | MF5010-V2 (Turns: 35) |
|---|---|---|
| Item Name | MF5010-V2 | MF5010-V2 |
| Turns | 10 | 35 |
| Rated Voltage | 16V | 16V |
| Max Speed | 3050RPM | 870RPM |
| Rated Torque | 0.26N.m | 0.24N.m |
| Rated Speed | 2400RPM | 440RPM |
| Rated Current | 5.06A | 1.35A |
| Max Power | 128W | 12W |
| Max Torque | 0.4N.m | 0.53N.m |
| Speed constant | 150rpm/V | 27.5rpm/V |
| Torque Constant | 0.05N.m/A | 0.18N.m/A |
| Winding Type | Y | Y |
| Phase Resistance | 0.33 Ohm | 3.2 Ohm |
| Phase Inductance | 0.13mH | 1.2mH |
| Motor Poles | 28 | 28 |
| Rotor inertia | 202gcm^2 | 202gcm^2 |
| Motor Temperature | YES | YES |
| Bearing Rated Load | 153N | 153N |
| Motor Weight | 137g | 137g |
| Recommend Drive | DF40V2 | DF40V2 |
| Drive input Voltage | 7.4-32V | 7.4-32V |
| Communication | RS485 OR CAN | RS485 OR CAN |
| Communication Frequency | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | 18bit Magnetic Encoder | 18bit Magnetic Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Control Mode | Torque Loop (24KHz) / Speed Loop (8KHz) / Position Loop (8KHz) | Torque Loop (24KHz) / Speed Loop (8KHz) / Position Loop (8KHz) |
| Acceleration curve | Trapeziod acceleration | Trapeziod acceleration |
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
- Camera PTZ
- Laser LiDAR
- Power station inspection robot
- Industrial inspection
Manuals / Files
Details

The MF5010‑V2 update improves encoder resolution to 18‑bit and optimizes cogging torque while keeping PWM, CAN, and RS485 support.
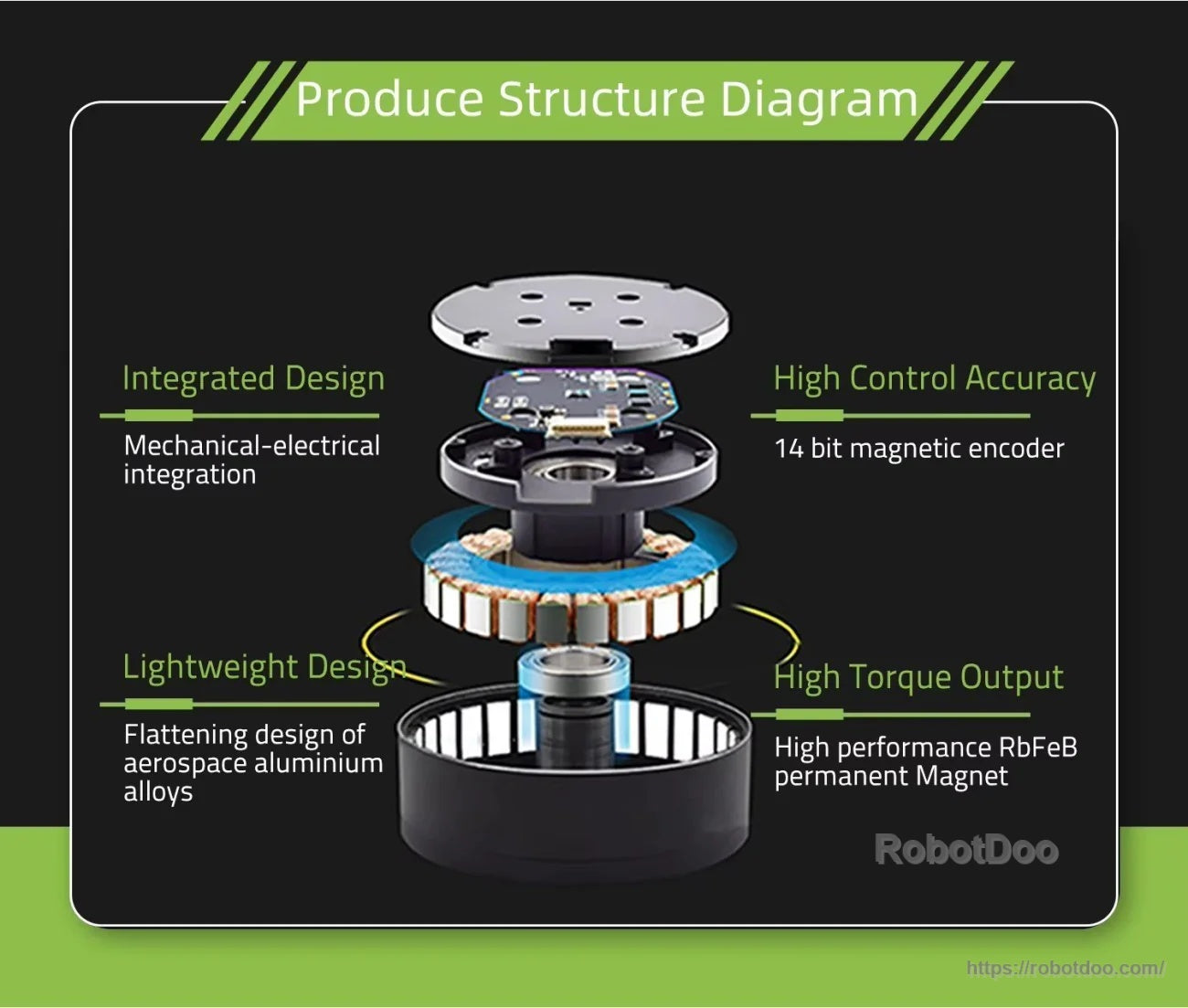
An integrated mechanical‑electrical layout combines a magnetic encoder with a high‑performance permanent magnet rotor for precise, high‑torque actuation.

Performance curves and the installation drawing help match the right winding option and confirm fit for your actuator design.




