




Overview
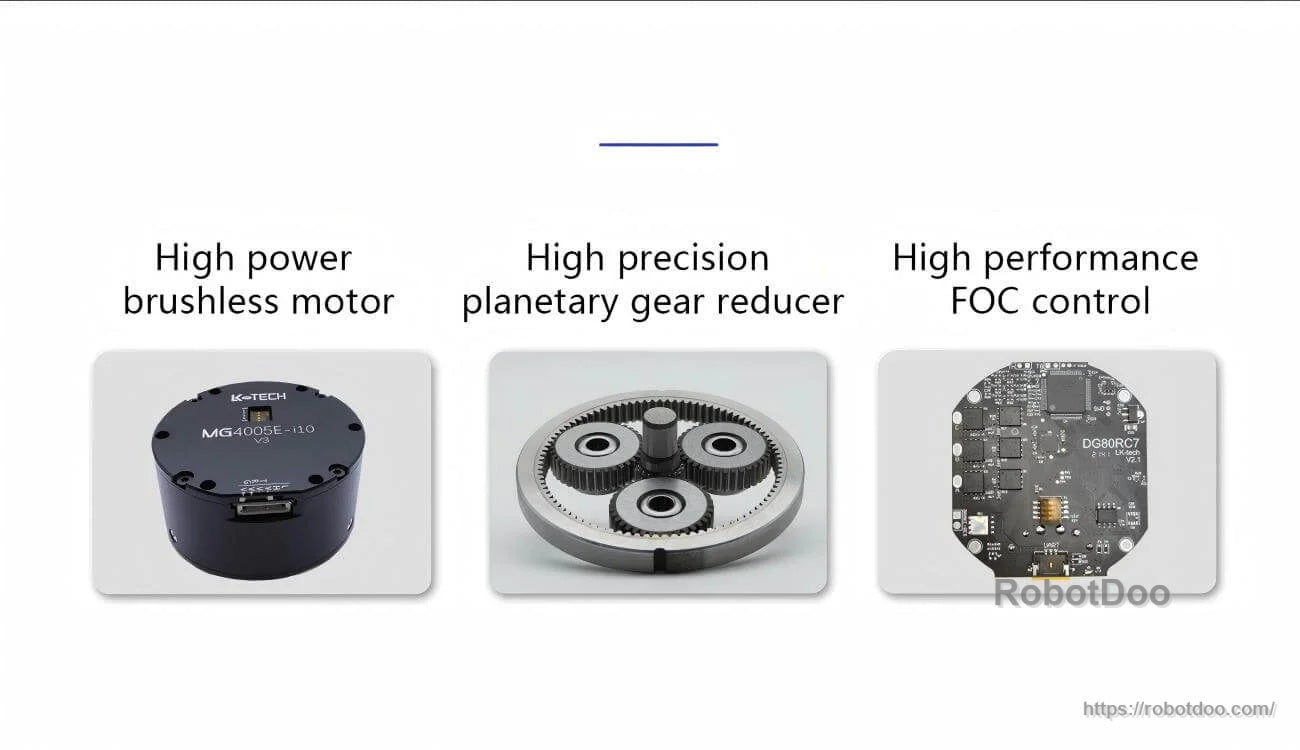
The LKMTECH MG4005E-i10-V3 is a planetary gear motor designed for robotics joints and compact drive assemblies. It combines a brushless motor, a PG4210 planetary reducer (1:10), and dual absolute magnetic encoders (18-bit motor side + 14-bit reducer side). Communication options include RS485 or CAN.
Key Features
- Planetary gear motor: “High power, large torque and high precision.”
- Dual absolute magnetic encoders: 18-bit single-turn (motor side) + 14-bit single-turn (reducer side)
- Reducer-side encoder provides single-turn output absolute value and remembers zero point after power off
- ID switch
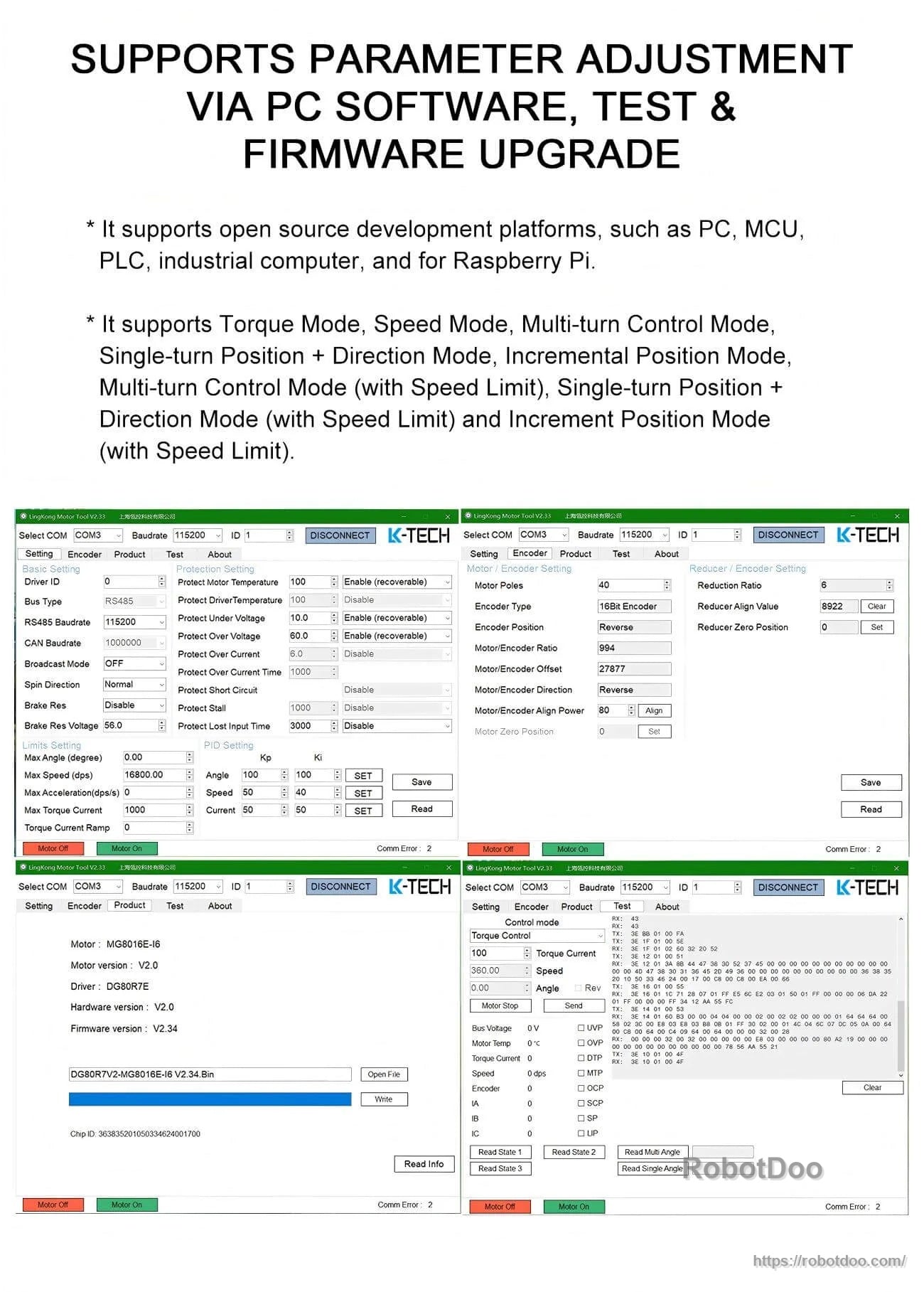
- Supports parameter adjustment via PC software, test & firmware upgrade
- Supports open source development platforms: PC, MCU, PLC, industrial computer, Raspberry Pi
- Control modes shown: Torque Control, Speed Control, Multi Loop Angle Control1/2, Single Loop Angle Control1/2, Increment Angle Control1/2
- Multi protection items shown: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP
- Reserved brake function (Brake / Brake Release)
- Dual temperature sensor interfaces monitor motor and drive temperatures in real time
- High performance FOC control (drive feature text)
Specifications
| Item Name | MG4005E-i10-V3 |
| Rated Voltage | 24V |
| Max Speed | 320RPM |
| Rated Speed | 255RPM |
| Rated Torque | 1 N.m |
| Max Torque | 2.5 N.m |
| Rated Current | 1.8A |
| Max Power | 65W |
| Speed constant | 106.3 rpm/V |
| Torque Constant | 0.06 N.m/A |
| Turns | 28 |
| Winding Type | Y |
| Phase Resistance | 1.4 ohm |
| Phase Inductance | 0.5 mH |
| Motor Poles | 28 |
| Rotor inertia | 140 gcm^2 |
| Motor Temperature | YES |
| Reducer Type | PG4210 |
| Reduction Ratio | 1:10 |
| Backlash | <= 10 arcmin |
| Bearing Rated Load | 1000N |
| Motor Weight | 183g |
| Recommend Drive | DG40E |
| Drive input Voltage | 7.4-32V |
| Communication | RS485 OR CAN |
| Communication Frequency | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | 18-bit (motor) + 14-bit (reducer) magnetic encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Control Mode | Torque Loop (24KHz) / Speed Loop (8KHz) / Position Loop (4KHz) |
| Acceleration curve | Trapezoid acceleration |
Interface Definition
| Interface | Note |
|---|---|
| A/H | RS485-A or CAN-H |
| B/L | RS485-B or CAN-L |
| V- | Negative Power Supply |
| V+ | Positive Power Supply |
| T | UART Transmitter |
| R | UART Receiver |
| G | Signal GND |
Applications
- Humanoid robots
- Robotic arms / robot arm
- Exoskeletons / wearable robot
- Quadruped robots / robot dog
- AGV vehicles / AGV car
- ARU robots
Manuals
Details

The MG4005E-i10-V3 integrates a brushless motor and planetary reducer for compact, high-torque robotic joints.

Dual absolute magnetic encoders provide motor-side (18-bit) and reducer-side (14-bit) position feedback, with an ID switch for setup.
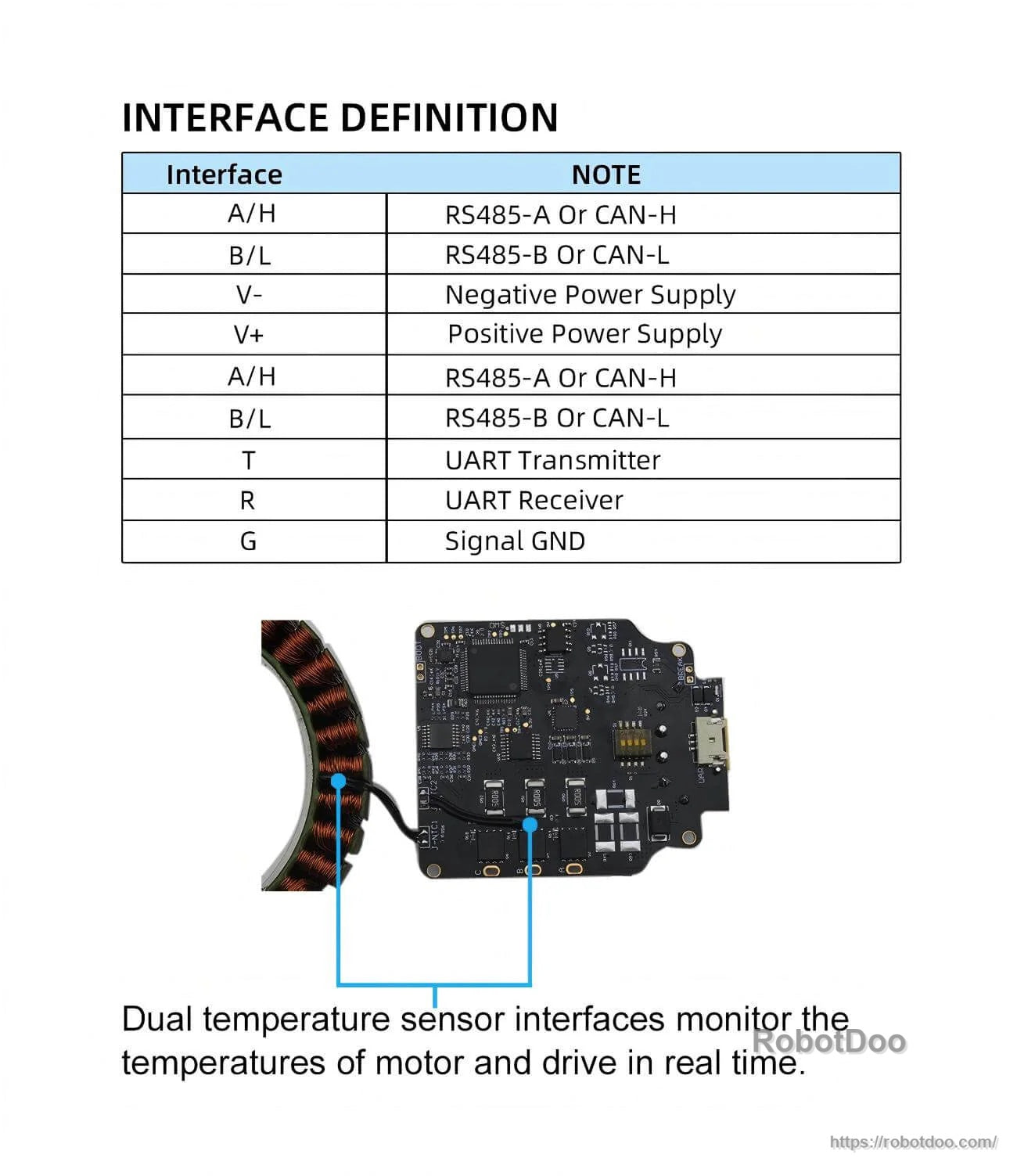
Clear pin definitions support RS485 or CAN communication alongside power and UART connections for integration and testing.

The recommended drive supports a wide input range and RS485/CAN bus control for responsive closed-loop motion.
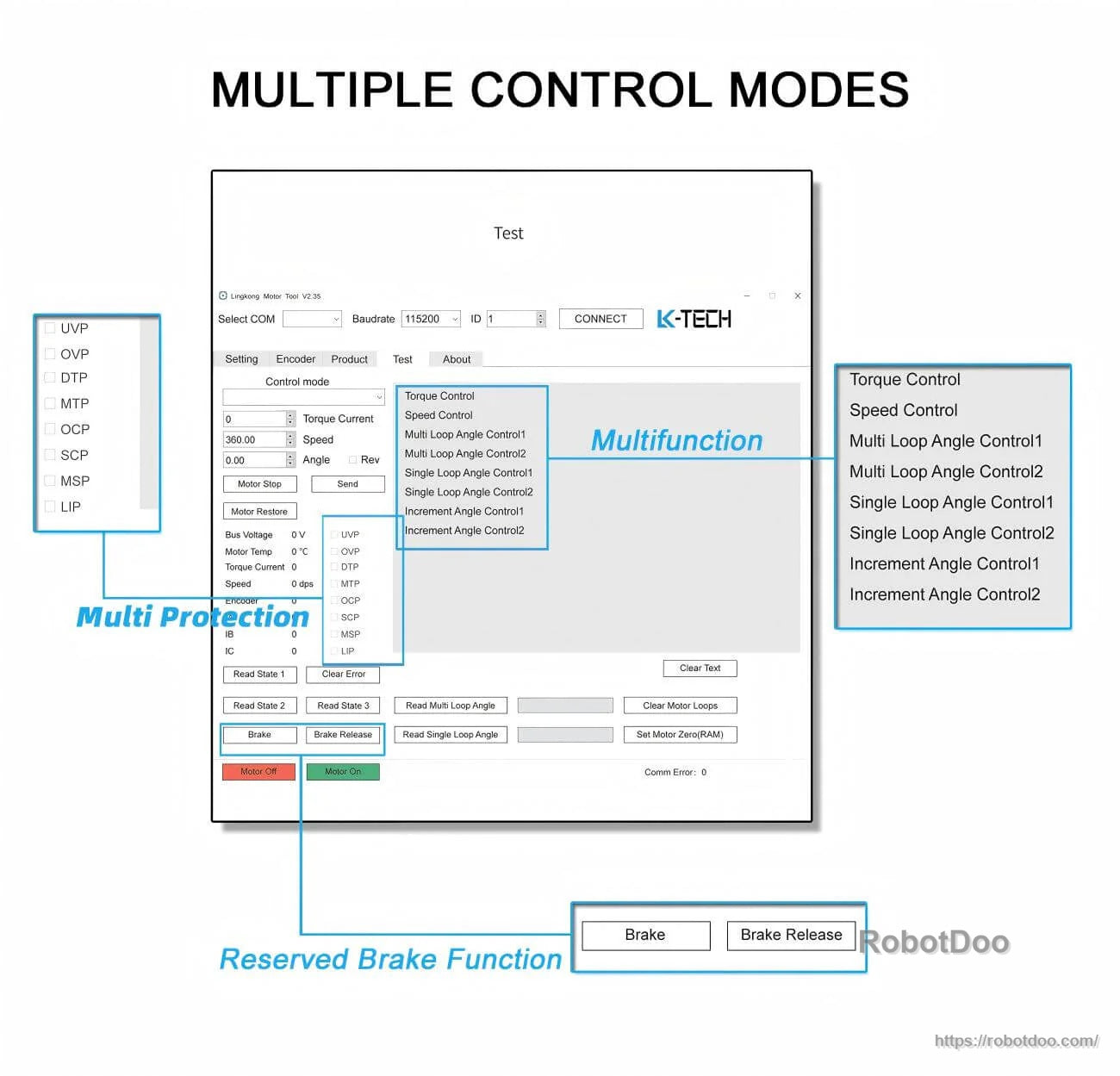
Multiple control modes and built-in protection options help tune torque, speed, and position behavior for demanding motion tasks.
Common applications include AGVs, robot arms, quadruped robots, and wearable robotics where compact torque density matters.




