



Overview
The MANIFOLD TECH Odin 1 is a spatial memory module designed for spatial perception and mapping. It combines depth sensing, RGB imaging, and built-in MindSLAM3 (fusion SLAM algorithm) to output point cloud, images, and pose data for robotics and multi-platform deployment.
Key Features
- Spatial perception: designed to provide higher-precision, wider-coverage environmental sensing.
- Ultra-long-range detection: max 70 m (at 90% reflectivity) and 30 m (at 10% reflectivity) under <500 lux.
- Ultra-wide field of view: 1204 1 906 FOV.
- High-density point cloud: up to 700,000 pts/s.
- High-resolution data capture: 240 1 180 depth module; RGB resolution listed as 1600 1 1298 (spec table). (Some product materials state 1600 1 1296 RGB.)
- Adaptive environmental sensing: intended to maintain operation across diverse lighting conditions.
- Centimeter-level positioning accuracy: built-in SLAM positioning accuracy 75 cm + 1% [2].
- High-frequency pose update: pose output frequency up to 1000 Hz.
- Software interface: comprehensive SDK & ROS interfaces, supporting Linux platform deployment of custom SLAM algorithms.
- MindCloud platform capabilities: global optimization, dense deep fusion, neural rendering (3D Gaussian), efficient image annotation system, automatic monomerization, global coordinate system fusion (with RTK module), result cropping/stitching/correction, automatic registration and fusion of multi-session mapping results, mesh texture mapping file generation, 3D output formats (las, obj, e57, usd), integration with NVIDIA Omniverse.
Specifications
| Model | MANIFOLD TECH ODIN 1 |
| Depth resolution | 240 1 180 |
| Ranging range (Max) | 30 m @ 10% reflectivity (<500 lux); 70 m @ 90% reflectivity (<500 lux) |
| Ranging range (Min) | 0.2 m |
| Point frequency | Up to 700,000 pts/s |
| Ranging accuracy | 73 cm @ 11 [1] |
| Field of view (FOV, horizontal 1 vertical) | 1206 1 906 |
| Angular resolution | 0.56 1 0.56 |
| Laser wavelength | 940 nm |
| Laser safety class | Class 1 Eye-safe |
| Frame rate | Up to 15 FPS |
| Resolution | 1600 1 1298 |
| Exposure mode | Global Shutter |
| FOV (H 1 V) | Approx. 1206 1 906 |
| Built-in SLAM positioning accuracy | 75 cm + 1% [2] |
| Pose output frequency | Up to 1000 Hz |
| Weight | Approx. 300 g; 200 g (without housing) |
| Dimensions (L 1 W 1 D) | Approx. 100 1 62 1 43 (main body) / 46 (with aviation connector), unit: mm |
| Power consumption | Max. 15 W |
| Protection rating | IP67 |
| Operating voltage | 926 V |
| Operating temperature | 06C ~ 406C |
| Storage temperature | -106C ~ 456C |
| Point cloud | True Color / Intensity / Reflectivity / Elevation Mode raw point cloud |
| Photos | Raw RGB images & undistorted RGB images; image timestamp & pose quaternion |
| Software interface | Comprehensive SDK & ROS interfaces, supporting Linux platform deployment of custom SLAM algorithms |
| MindCloud platform capabilities | Global Optimization; Dense Deep Fusion; Neural Rendering (3D Gaussian); Efficient Image Annotation System; Automatic Monomerization; Global Coordinate System Fusion (with RTK Module); Result Cropping, Stitching, and Correction; Automatic Registration and Fusion of Multi-session Mapping Results; Generate Mesh Texture Mapping Files; Support mainstream 3D formats (las, obj, e57, usd) for 3D output; Seamless integration with NVIDIA Omniverse |
Applications
- Robot perception and mapping
- SLAM-based navigation and pose output
- 3D reconstruction and point cloud capture
- Multi-platform deployment on robots, drones, and related systems
Manuals
For integration and pre-sales questions, contact customer service through this store9s official support channels.
Details

The MANIFOLD TECH Odin 1 combines depth sensing, RGB imaging, and onboard spatial memory for robotics perception and mapping workflows.

A compact multi-sensor front end supports environmental perception while keeping the module suitable for mobile platforms.
Spatial perception is designed to give robotic systems wider environmental awareness for navigation and mapping tasks.
Long-range detection supports larger operating areas, with stated ranges of 70 m at 90% reflectivity and 30 m at 10% reflectivity under <500 lux.
A 120° × 90° field of view helps capture more of the surrounding scene in a single frame.
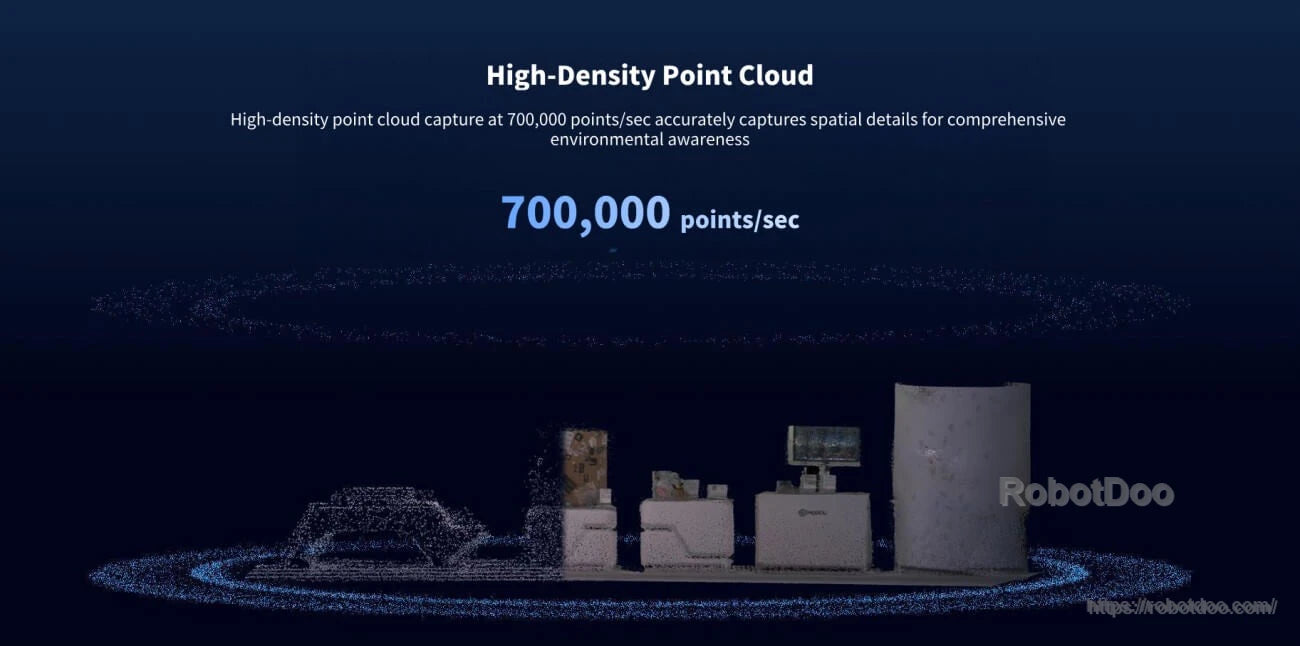
Point cloud output reaches up to 700,000 points per second for detailed environmental capture.

Depth and RGB data combine to support true-color point clouds, reconstruction, and downstream perception processing.
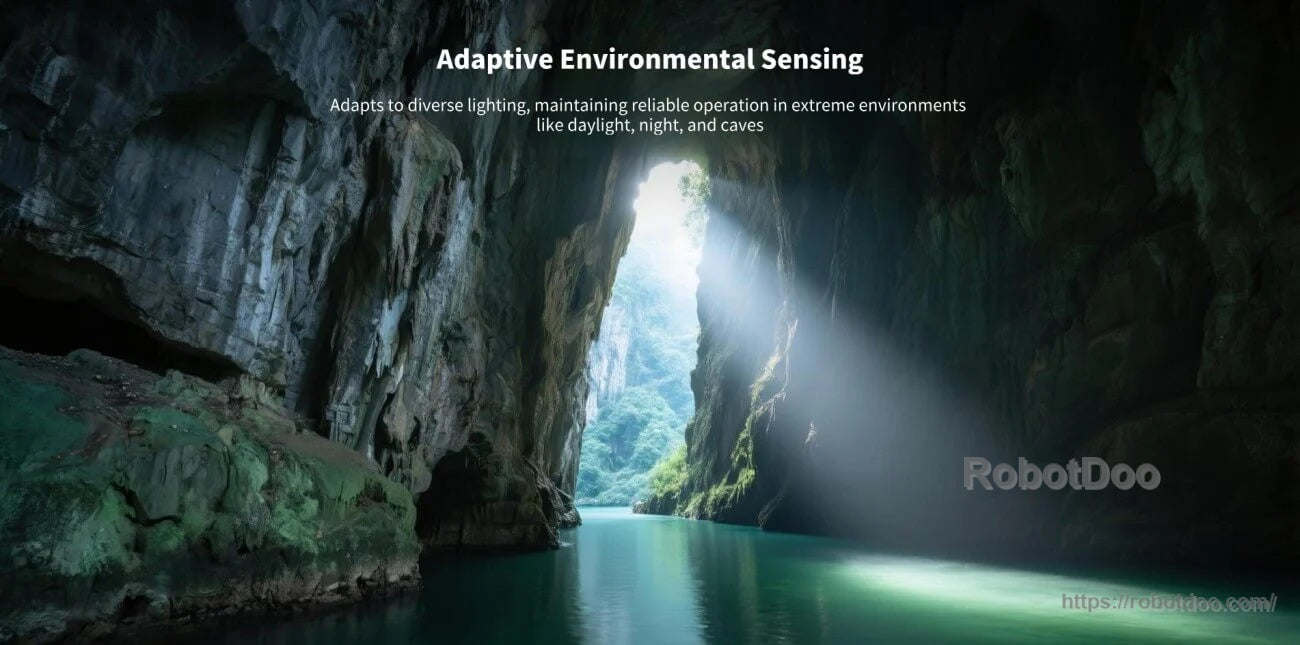
Adaptive environmental sensing is intended to maintain reliable operation across challenging light conditions such as daylight, dim areas, and caves.
Built-in MindSLAM3 enables the module to output pose data alongside point clouds and images for integrated SLAM applications.


Pose output up to 1000 Hz supports fast-moving platforms and dynamic indoor navigation scenarios.


The lightweight, compact design is intended for integration on robots, drones, robotic arms, and custom development platforms.

At about 300 g and approximately 100 × 62 × 43 mm, the module is sized for flexible hardware integration.
SDK and ROS interfaces support Linux-based development and access to processed point cloud, image, pose, and IMU data.

Odin 1 integrates with the MindCloud Platform for annotating and reconstructing 3D data to build and share spatial memories.
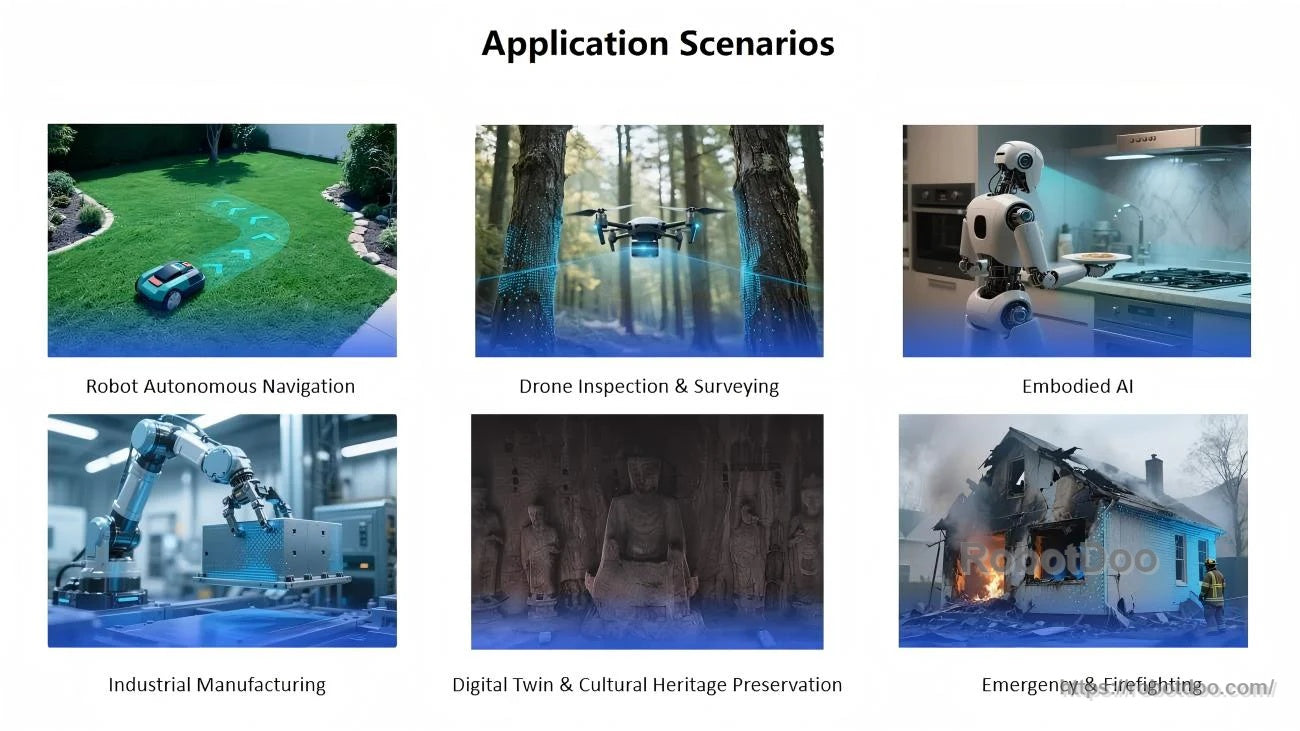
Odin 1 spatial mapping and SLAM support use cases from autonomous robot navigation and drone surveying to industrial automation, digital twin capture, and emergency response.



