Overview
MyActuator RH-17 Motor is an RH Series harmonic actuator motor designed for robotics joints and automation mechanisms. It supports CAN BUS and EtherCAT communication and uses a dual absolute encoder configuration (ABS-17BIT input and ABS-17BIT output). The RH series is described with features including high precision, low noise, hollow design, high efficiency, and dual encoder feedback.
Key Features
- RH Series harmonic actuator motor
- Communication: CAN BUS / EtherCAT
- Dual encoder feedback: ABS-17BIT (Input) + ABS-17BIT (Output)
- Backlash: <40 Arcsec
- Repeat position accuracy: <0.01 Degree
- Series feature labels: High Precision, Low Noise, Hollow Design, High Efficiency
Specifications
| Gear Ratio | 100 |
| Input Voltage | 48V |
| No Load Speed | 30RPM |
| No-Load Input Current | 0.6A |
| Rated Speed | 25RPM |
| Rated Torque | 35N.m |
| Rated Output Power | 91W |
| Rated Phase Current | 4.7A(rms) |
| Peak Torque | 54N.m |
| Peak Phase Current | 7.4A(rms) |
| Motor Back-EMF Constant | 19.2Vdc/Krpm |
| Module Torque Constant | 7.4N.m/A |
| Motor Phase Resistance | 0.7Ω |
| Motor Phase Inductance | 0.47mH |
| Pole Pair | 10 |
| 3 Phase Connection | Y |
| Backlash | <40 Arcsec |
| Radial Load Static load | 16.3KN |
| Radial Load Dynamic load | 10.4KN |
| Axial Load Static load | 78.2KN |
| Axial Load Dynamic load | 20.8KN |
| Inertia N | 0.52Kg.cm² |
| Inertia B | 0.56Kg.cm² |
| Encoder Type | Dual Encoder ABS-17BIT(Input) | ABS-17BIT(Output) |
| Repeat Position Accuracy | <0.01Degree |
| Communication | CAN BUS/EtherCAT |
| Weight N | 1.11Kg |
| Weight B | 1.28Kg |
| Insulation Grade | F |
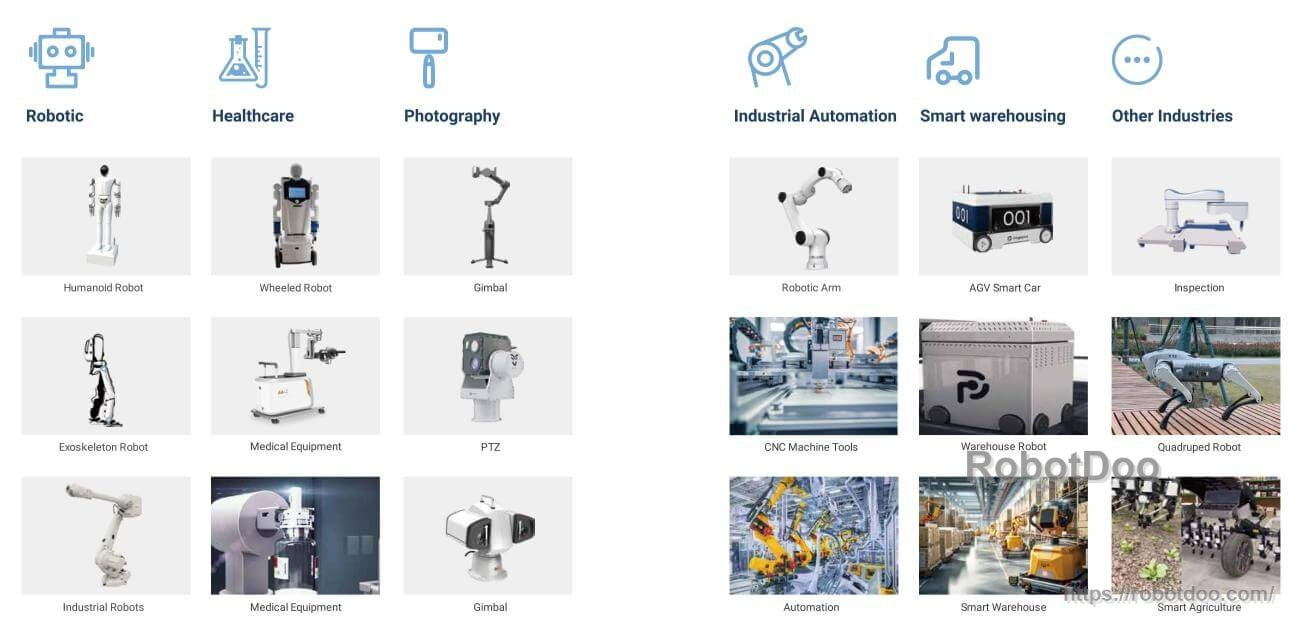
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
- Industrial automation
- Smart warehousing
- Gimbal systems
- Inspection equipment
For selection help and integration guidance, contact the store customer service team.
Manuals / Files
- MyActuator_RH_17_stp.zip
- Motor_Motion_Protocol.pdf
- EtherCAT_control_protocol.pdf
- RH-17_Accessories.pdf
- 1MT.055.024_RH-17-100-E-B.pdf
- 1MT.055.020_RH-17-100-E-N.pdf
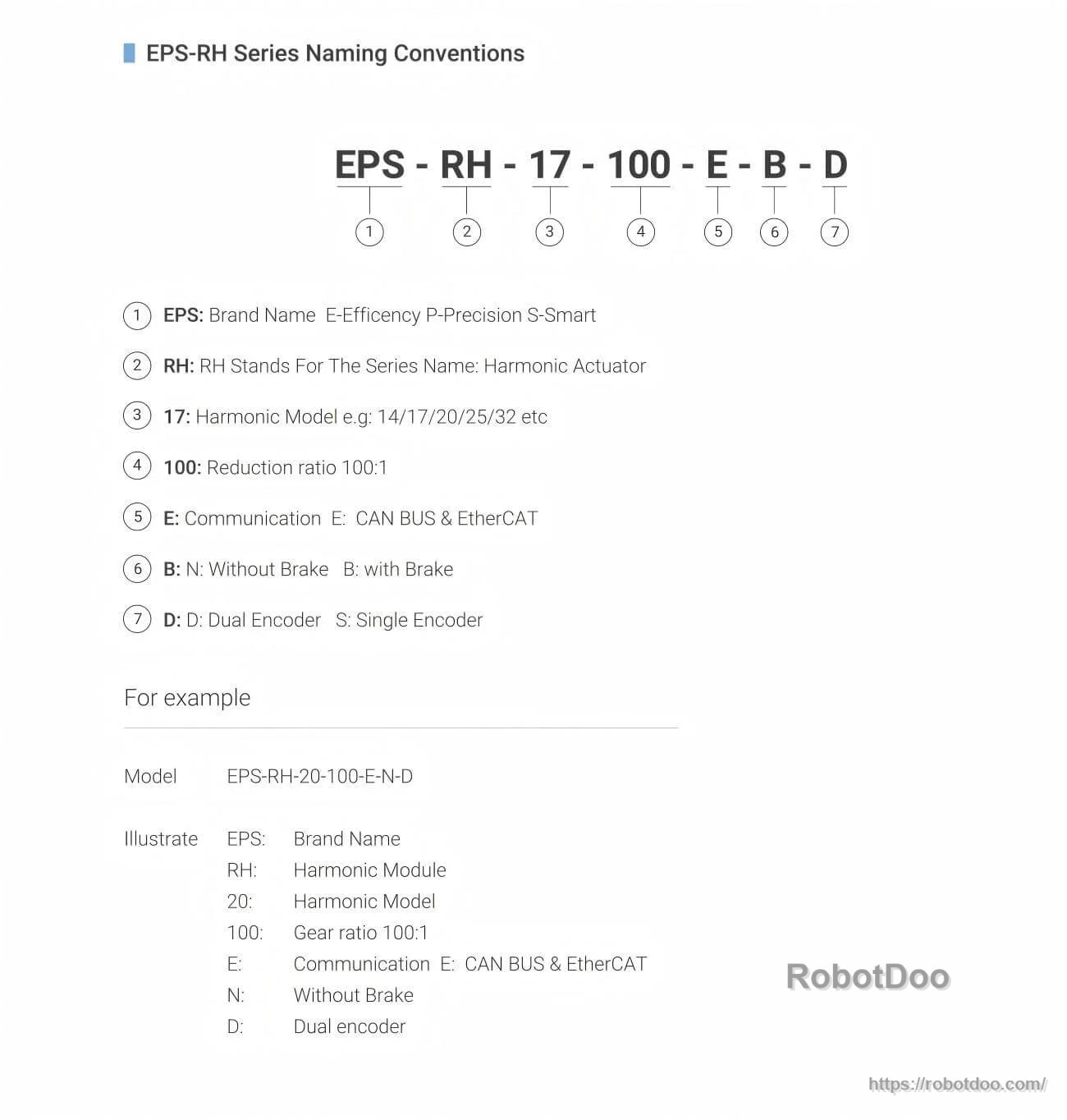
RH Series Model Naming (as provided)
- Format example: EPS-RH-17-100-E-B-D
- EPS: Brand name (E-Efficency, P-Precision, S-Smart)
- RH: Series name (Harmonic Actuator)
- 17: Harmonic model (e.g., 14/17/20/25/32 etc.)
- 100: Reduction ratio 100:1
- E: Communication (CAN BUS & EtherCAT)
- B: Brake option (N: Without Brake, B: With Brake)
- D: Encoder option (D: Dual Encoder, S: Single Encoder)
Details

Use the EPS-RH naming format to confirm gear ratio, CAN BUS/EtherCAT communication, brake option, and single or dual encoder configuration.
Built for joint-driven motion in robotics and automation, including humanoid robots, robotic arms, AGVs, gimbals, and inspection systems.