





Overview
The MyActuator RMD-X6-8 Motor is part of the RMD-X V3 Series, designed for robotics joints where small size, light weight, and high integration are required. It supports installing a second encoder for higher control accuracy and provides encoder multi-turn angle recording with data reserved after power off, helping reduce angle change concerns after power loss.
Key Features
- RMD-X V3 Series: small size / light weight / high integration
- Supports installing a second encoder (higher control accuracy)
- Encoder multi-turn angle recording function; reserves data after power off
- New V3.0 debugging software with real-time data waveform display
- Double bearing construction; compression resistance and shock resistance (manufacturer states 20% performance increased)
- Manufacturer-listed advantages: multiple protections, low noise, high precision, long service life
Specifications
| Gear Ratio | 8 |
| Input Voltage | 48V |
| Rated Speed | 310RPM |
| Rated Torque | 4.5N.m |
| Rated Output Power | 135W |
| Rated Phase Current | 3.6A(rms) |
| Peak Torque | 8N.m |
| Peak Phase Current | 7.2A(rms) |
| Efficiency | 78% |
| Pole Pair | 14 |
| Anti-Force Torque | 0.1N.m |
| Backlash | 10Arcmin |
| Axial Payload | 775N |
| Radial Payload | 1040N |
| Inertia | 6.8Kg.cm^2 |
| Encoder Type | 14/14 |
| Communication | CAN:1M/RS485:115200/500K/1M/2.5M |
| Weight | 0.49Kg |
Applications
- Humanoid robots
- Robotic arms / mechanical arms
- Exoskeleton robots
- Quadruped robots
- AGV smart truck / AGV vehicles
- ARU robots
Manuals
Details

Built for robotics joints, the RMD‑X V3 series focuses on compact size, low weight, and high integration for easy system design.

Optional second‑encoder support helps improve control accuracy and reduces concerns about angle changes after a power loss.
Multi‑turn angle recording with data retained after power‑off helps maintain reliable position tracking between restarts.
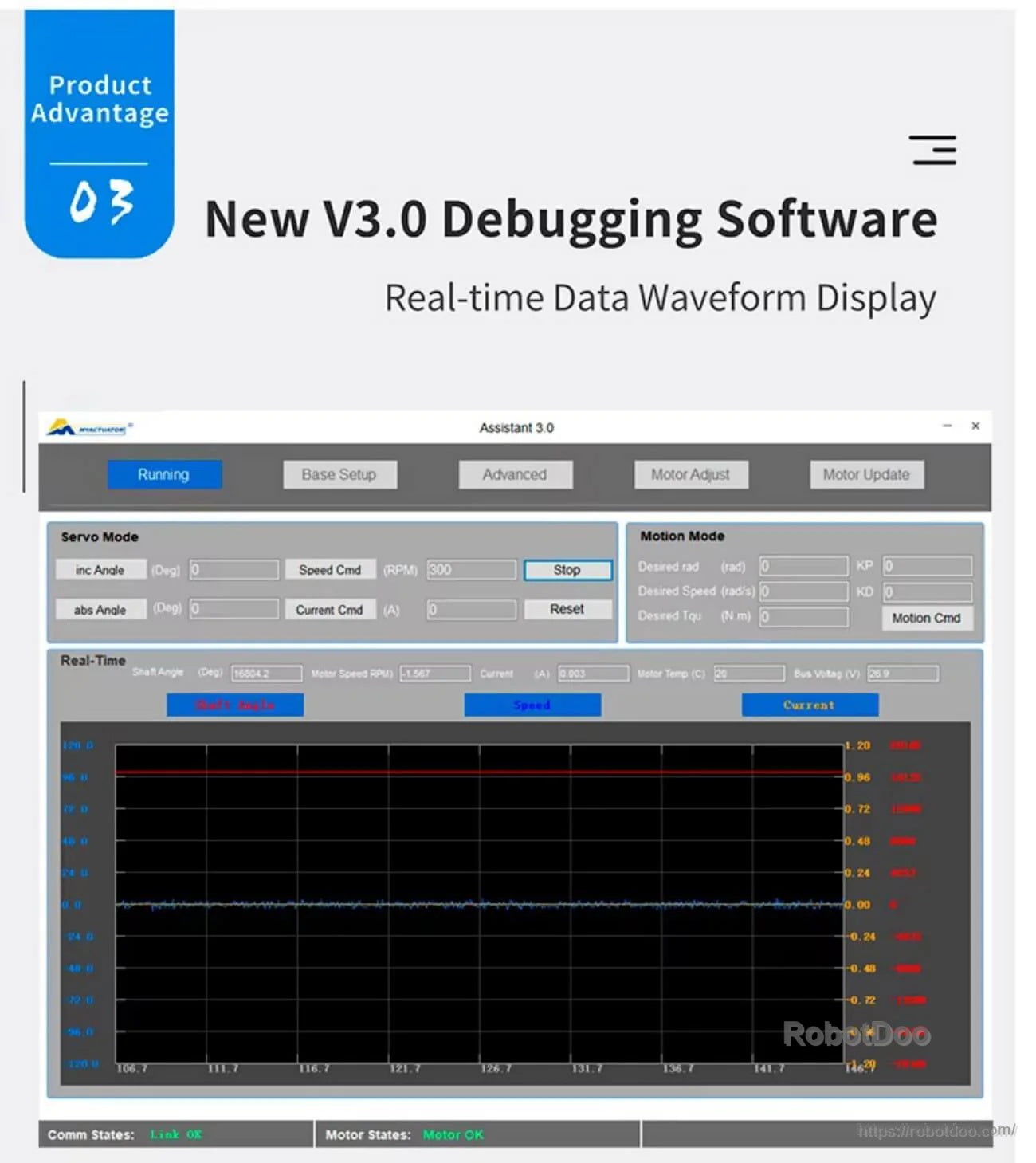
The V3.0 debugging software provides real‑time waveform monitoring to streamline tuning and diagnostics.
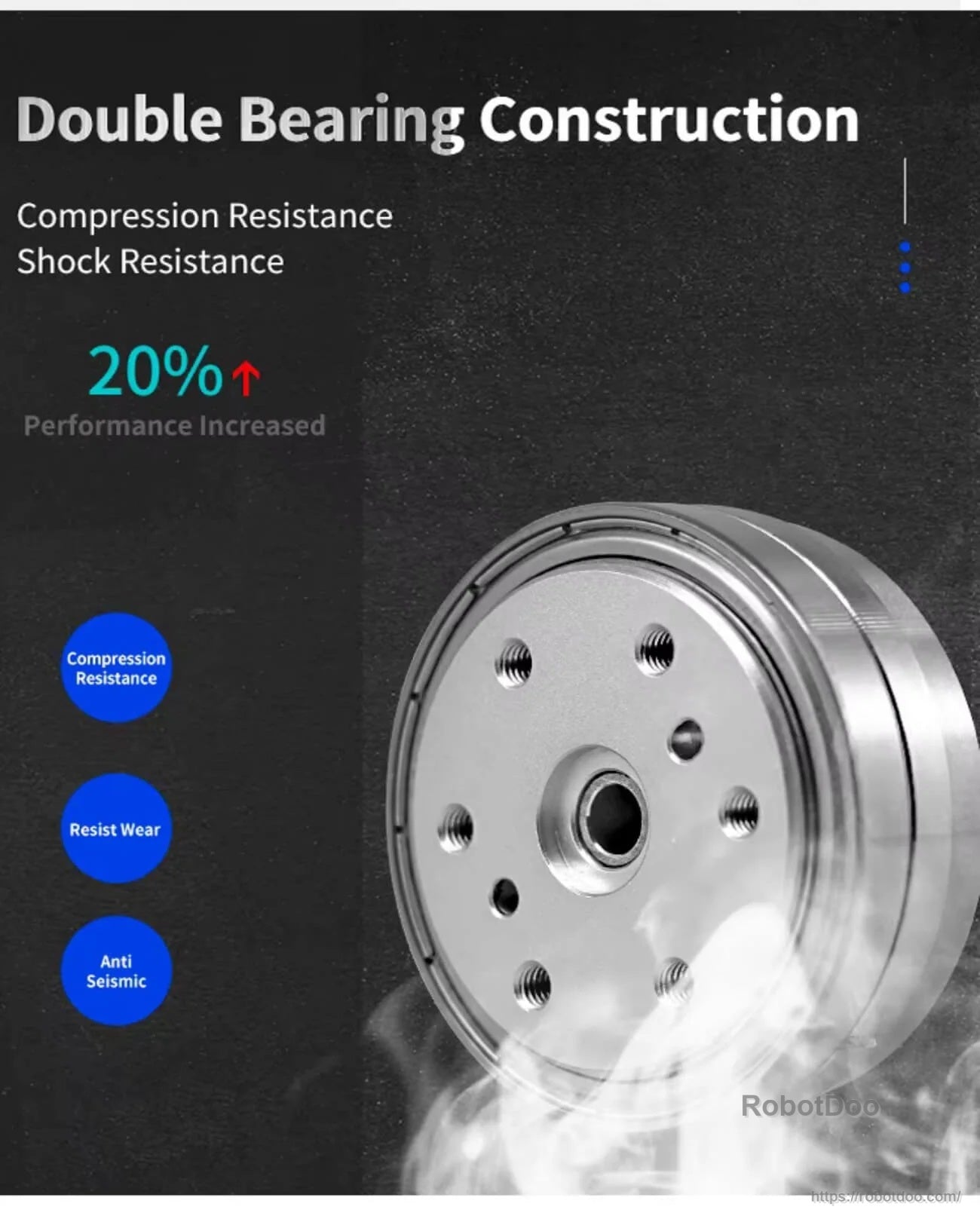
Double‑bearing construction is designed to improve compression and shock resistance in demanding robotic applications.
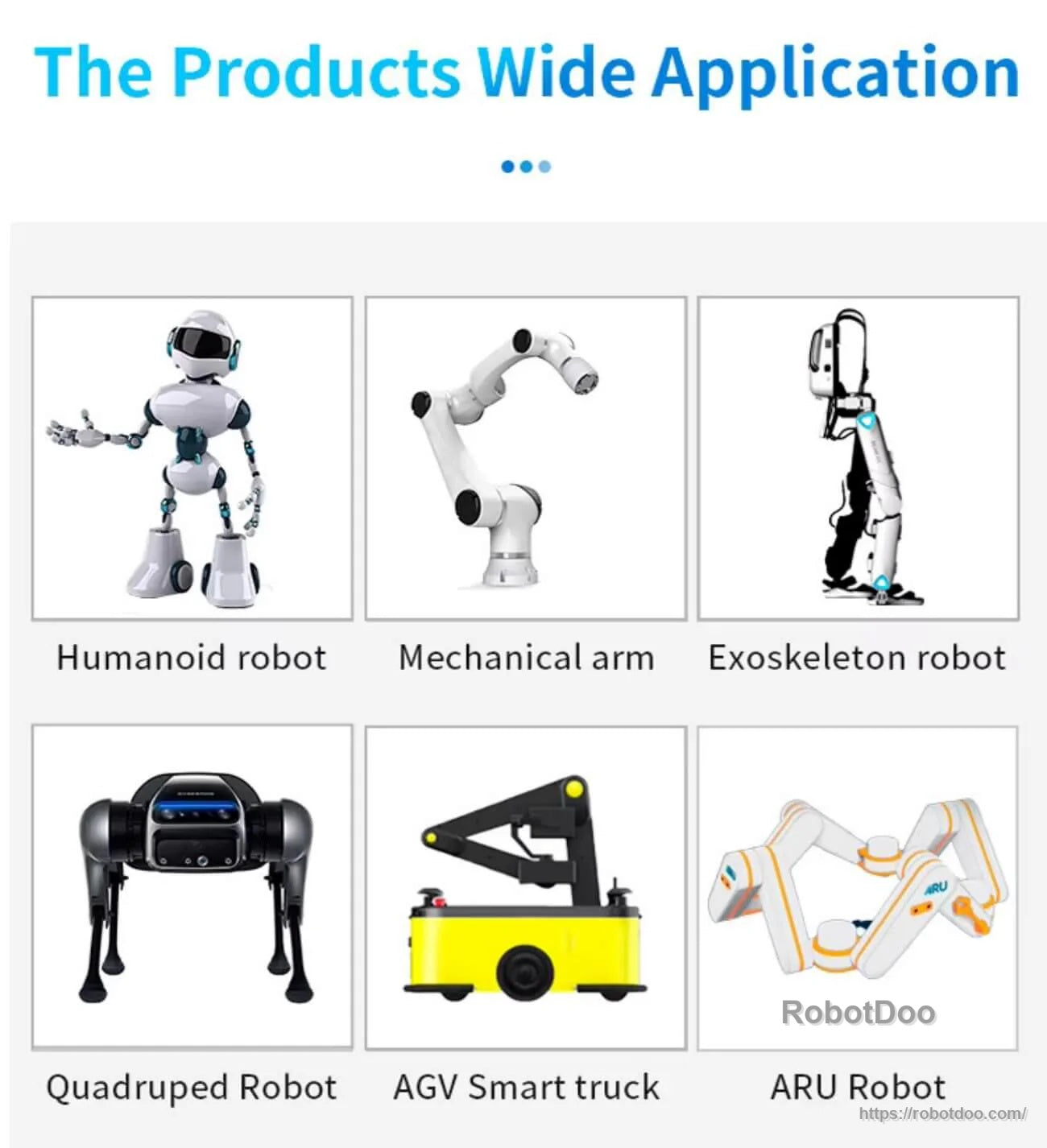
Suitable for a wide range of robots, including humanoids, robotic arms, exoskeletons, quadrupeds, and AGV platforms.





