



Overview
RoboSense Airy is a LiDAR sensor described as “The World’s First 192-Beam Hemispherical Digital LiDAR”. It delivers an ultra-wide hemispherical field of view (360° horizontal and 90° vertical) with up to a 60 m maximum range, and provides UDP packet output over Ethernet for real-time point cloud processing in robotics perception and SLAM workflows.
Compact in size (φ60mm×H63mm) and with low power consumption (<8W), Airy is designed for flexible integration where space, weight, and power budgets are limited.
Key Features
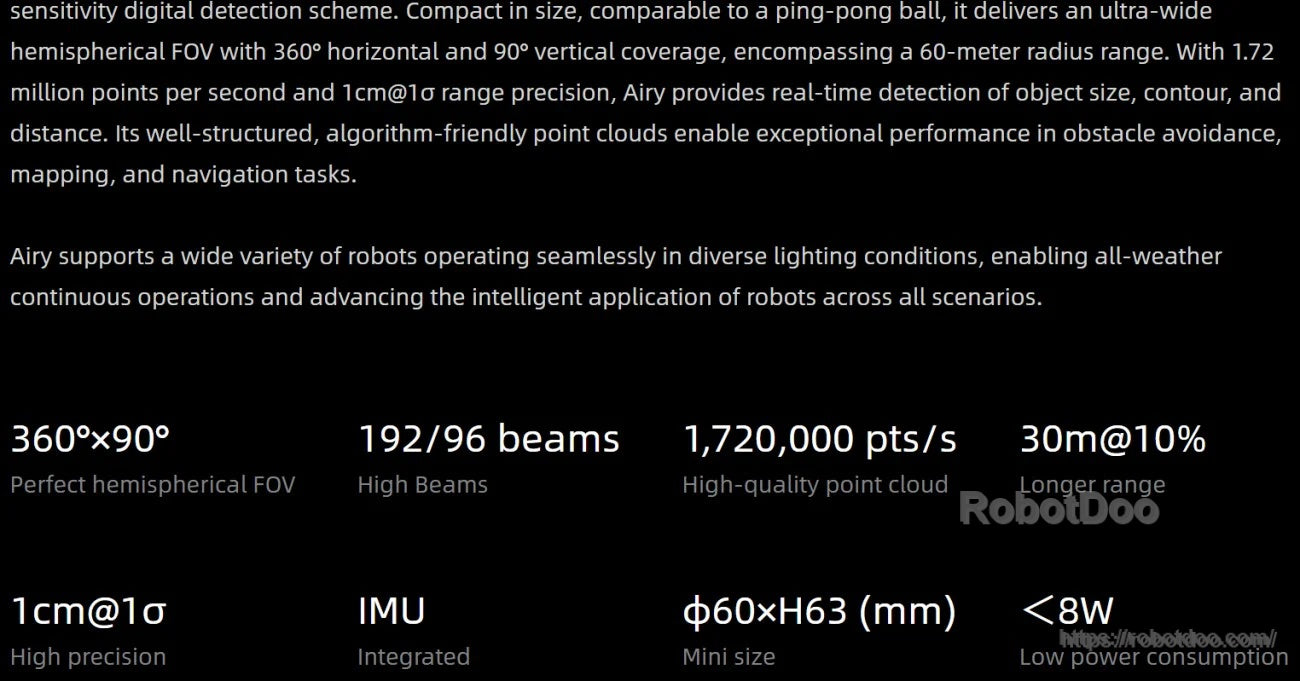
- Hemispherical FOV: 360°×90° (“Perfect hemispherical FOV”)
- Beam options: 192/96/48 lines (“192/96 beams” shown; lines listed as 192/96/48)
- High point rate: up to ~1,720,000 pts/s (single return, 192-beam) and ~3,440,000 pts/s (dual return, 192-beam)
- Range: 30m@10%; maximum range 60m (“Longer range”)
- High precision: accuracy ±1 cm; “1cm@1σ” is referenced in product materials
- Integrated IMU (stated as “IMU Integrated”)
- Mini size: φ60mm×H63mm; weight (without cabling) <240 g
- Digital architecture is described with VCSEL emitter chips and SPAD-SOC chips, using a digital transmission and reception architecture
- Ingress protection: IP67, IP6K9K
- Laser safety: Class 1 eye safety
Technical Highlights (from product materials)
- “Compact in size, comparable to a ping-pong ball, it delivers an ultra-wide hemispherical FOV with 360° horizontal and 90° vertical coverage, encompassing a 60-meter radius range.”
- “With 1.72 million points per second and 1cm@1σ range precision, Airy provides real-time detection of object size, contour, and distance.”
- “Its well-structured, algorithm-friendly point clouds enable exceptional performance in obstacle avoidance, mapping, and navigation tasks.”
- “Seamlessly performs SLAM in both large-scale outdoor environments and confined indoor spaces, delivering high-precision 3D digital models.”
- “Achieves a precision of up to 1cm@1σ, far surpassing similar LiDARs on the market.”
- “Ensures the safe operation of robots in environments such as lawns and concrete surfaces by accurately detecting small animals.”
Specifications
| Range | 30m@10% |
| Maximum Range | 60m |
| FOV (H×V) | 360°×90° |
| Angular Resolution (H×V) | Avg. 0.4°×0.47° |
| Frame Rate | 10Hz |
| Points per Second (Single Return Mode) |
~1,720,000pts/s (192-Beam) ~860,000pts/s (96-Beam) ~430,000pts/s (48-Beam) |
| Points per Second (Dual Return Mode) |
~3,440,000pts/s (192-Beam) ~1,720,000pts/s (96-Beam) ~860,000pts/s (48-Beam) |
| # of Lines | 192/96/48 |
| Accuracy | ±1cm |
| Blind Spot | <0.1m |
| Ethernet Connection | 100Base-TX |
| Output | UDP packets over Ethernet |
| UDP Packet Include | Spatial Coordinates; Intensity; Timestamp, etc. |
| Time Synchronization | GPRMC with 1PPS, PTP & gPTP |
| Operating Voltage | 9V ~ 32V |
| Power Consumption | <8W |
| Dimension | φ60mm×H63mm |
| Weight (Without Cabling) | <240g |
| Operating Temperature | ~40°C ~ +60°C |
| Storage Temperature | ~40°C ~ +85°C |
| Laser Safety | Class 1 eye safety |
| Ingress Protection | IP67, IP6K9K |
Applications
- Humanoid Robots
- Robotic Arms
- Exoskeletons
- Quadruped Robots
- AGV Vehicles
- ARU Robots
Manuals & Downloads
- MF-12025 Installation Drawing (PDF)
- Airy_3D_FOV.STEP
- Airy Product Introduction Book (PDF)
- Airy Product User Manual (PDF)
- Airy Shell Drawing (PDF)
- Airy Aircraft Plug Drawing (PDF)
- Airy 1.5-meter Aviation Connector Cable Drawing (PDF)
Videos
Details

Airy combines a compact form factor with a hemispherical field of view for robotics perception and SLAM.
Core performance at a glance: 360°×90° coverage, up to 192 beams, integrated IMU, and low power draw.
Designed for tight SWaP budgets, with a 60 mm diameter body and low power consumption for easier integration.

A ping-pong-ball size comparison highlights how easily Airy fits on mobile robots and sensor rigs.

Wide hemispherical coverage helps reduce blind spots for mapping, navigation, and obstacle avoidance.
High beam count and point rate support detailed, algorithm-friendly point clouds for real-time perception.
Consistent point cloud output supports SLAM across both indoor and outdoor environments.
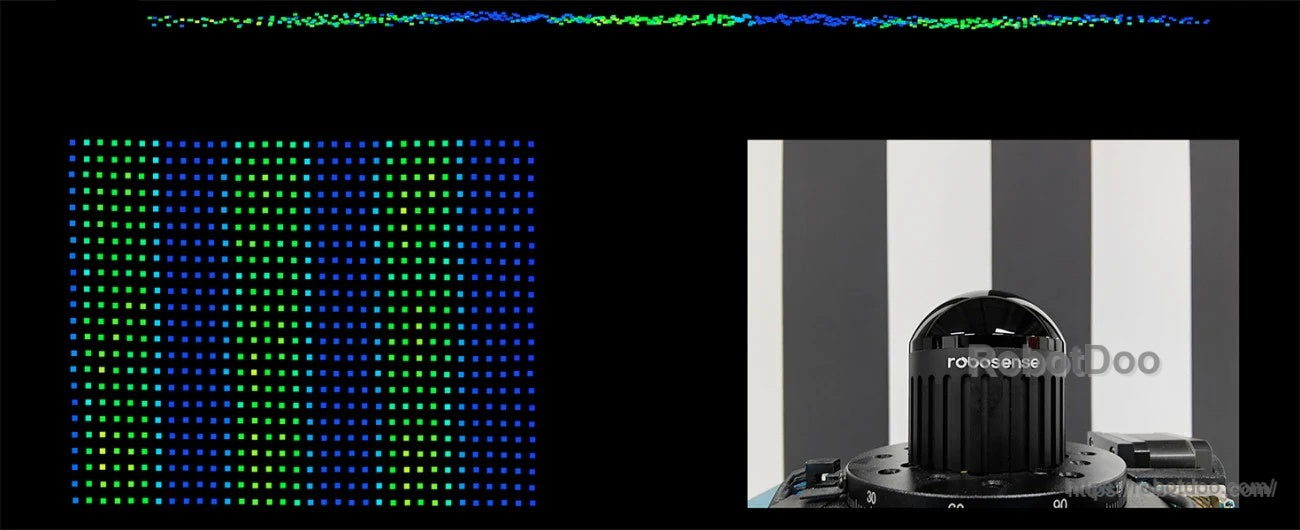
Example point cloud density for recognizing object contours and structure in robotics applications.
Digital architecture with VCSEL emitters and SPAD-based reception helps streamline signal processing and integration.

Typical application scenarios include autonomous robots that need wide-FOV sensing for navigation and mapping.



