




Overview
SITO DRIVE TA-40 is a compact rotary actuator designed for robot joint integration. The actuator is shown as a highly integrated joint module with internal elements labeled: harmonic reducer, frameless torque motor, drive, motor end/output end encoder, and an optional brake.
For integration support (drawings/3D files) or selection questions, contact customer service for assistance.
Key Features
- Communication mode: CAN 2.0B; baud rate: 1M bps
- Face mounting installation method
- Hollow bore diameter: 6 mm
- Environmental rating: IP54
Specifications
| Parameter | TA-40 (Transmission Ratio 50) | TA-40 (Transmission Ratio 100) |
|---|---|---|
| Model | TA-40 | TA-40 |
| Transmission Ratio | 50 | 100 |
| Rated Torque | 1.8 Nm | 2.4 Nm |
| Peak Torque allowed during start/stop | 3.3 Nm | 4.8 Nm |
| Maximum allowable average load torque | 2.3 Nm | 3.3 Nm |
| Instantaneous Maximum Torque | 6.6 Nm | 9 Nm |
| Diameter | 40 mm | 40 mm |
| Length | 55.55 mm | 55.55 mm |
| Hollow Bore Diameter | 6 mm | 6 mm |
| Weight without brake | 0.21 kg | 0.23 kg |
| Weight with brake | 0.23 kg | 0.23 kg |
| Maximum Operating Temperature | 80 °C | 80 °C |
| Minimum Operating Temperature | -40 °C | -40 °C |
| Life | 7000 h | 7000 h |
| Installation Methods | Face Mounting | Face Mounting |
| Repeat Positioning Accuracy | 35 arcsec | 18 arcsec |
| Absolute Positioning Accuracy | 100 arcsec | 100 arcsec |
| Communication Mode | CAN 2.0B | CAN 2.0B |
| Baud rate | 1M bps | 1M bps |
| Maximum Output Speed | 80 rpm | 40 rpm |
| Supply Voltage | 10-60 V (Recommended 24V) | 10-60 V (Recommended 24V) |
| Rated Power | 30 W | 25 W |
| Peak Power | 90 W | 80 W |
| Version model | V1 | V1 |
| IP grade | IP54 | IP54 |
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
Additional Notes from Product Graphics
- Promotional text includes: “MINIMAL SPACE MAXIMUM POWER” and “Highly integrated miniaturized joint actuator”.
- Promotional measurement statements shown: “Measured power under rated conditions <30 W”; temperature resistance shown as “-35°~80°”; working life shown as “7000 h”. (Refer to the Specifications table above for TA-40 operating limits and power ratings.)
- Promotional range values shown for the actuator family: outer diameter 40-80 mm; single machine weight 0.23-1.1 kg; instantaneous maximum torque 6.6-95 Nm.
- Support text shown: multiple control modes; rich video tutorials; easy-to-use host computer software; comprehensive documentation support; complete SDK for Windows and Linux environments.
Downloads
Details

SITO DRIVE TA-40 is a compact rotary actuator built for highly integrated robot joint modules.
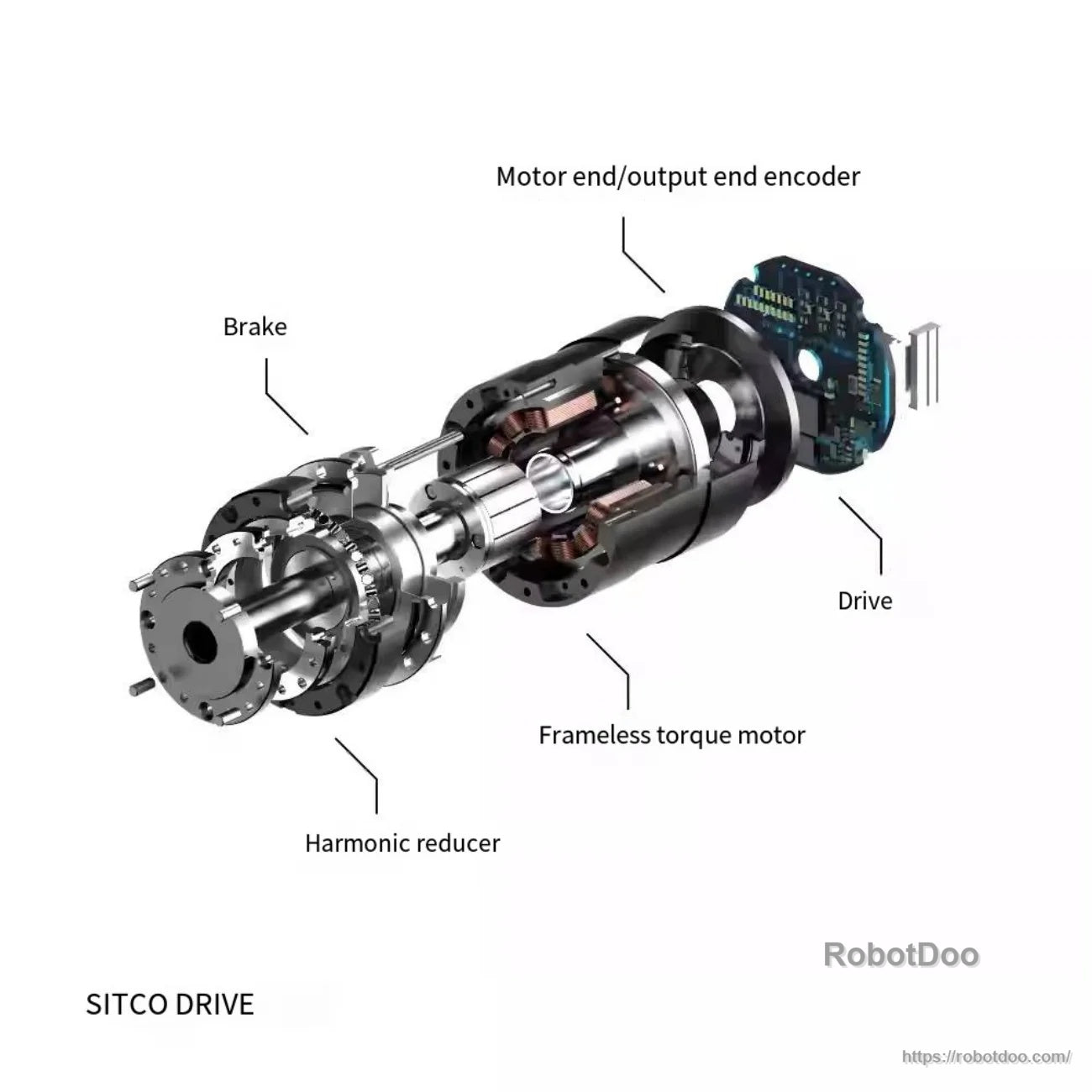
Integration combines a harmonic reducer, frameless torque motor, drive electronics, dual encoders, and an optional brake.
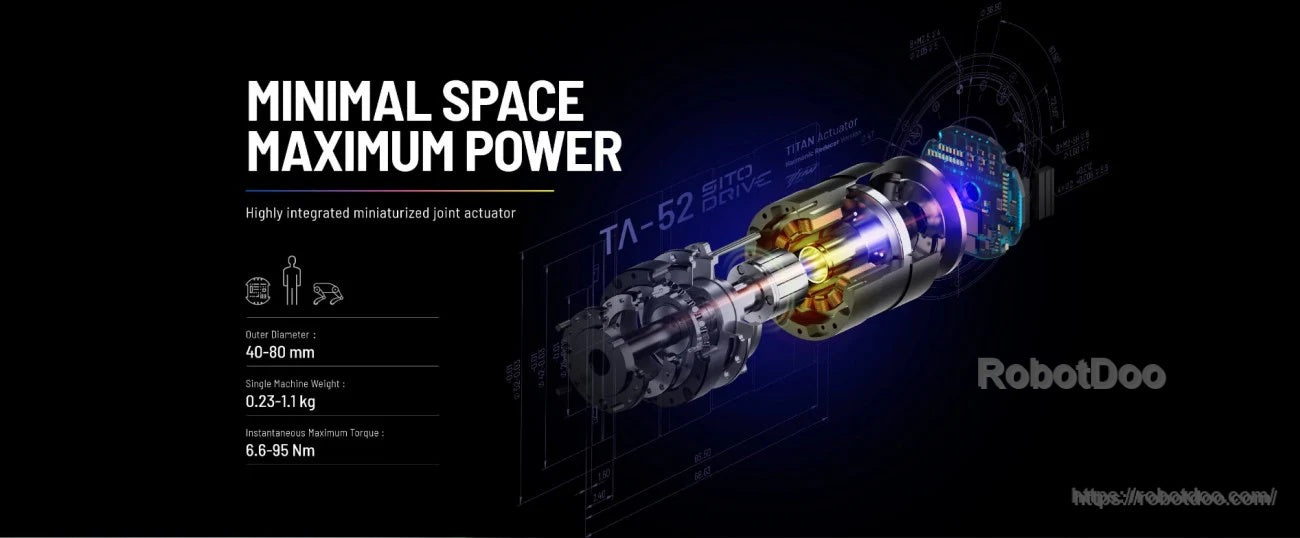
Compact form factor helps maximize torque density when space is limited in joint designs.

Measured power under rated conditions is kept below 30 W, supporting efficient joint actuation.

Wide temperature tolerance supports deployment from low-temperature environments through high-heat operation.

Long working life is rated up to 7000 hours for sustained robotics duty cycles.

Control modes and development support include host software, documentation, and an SDK for Windows and Linux.
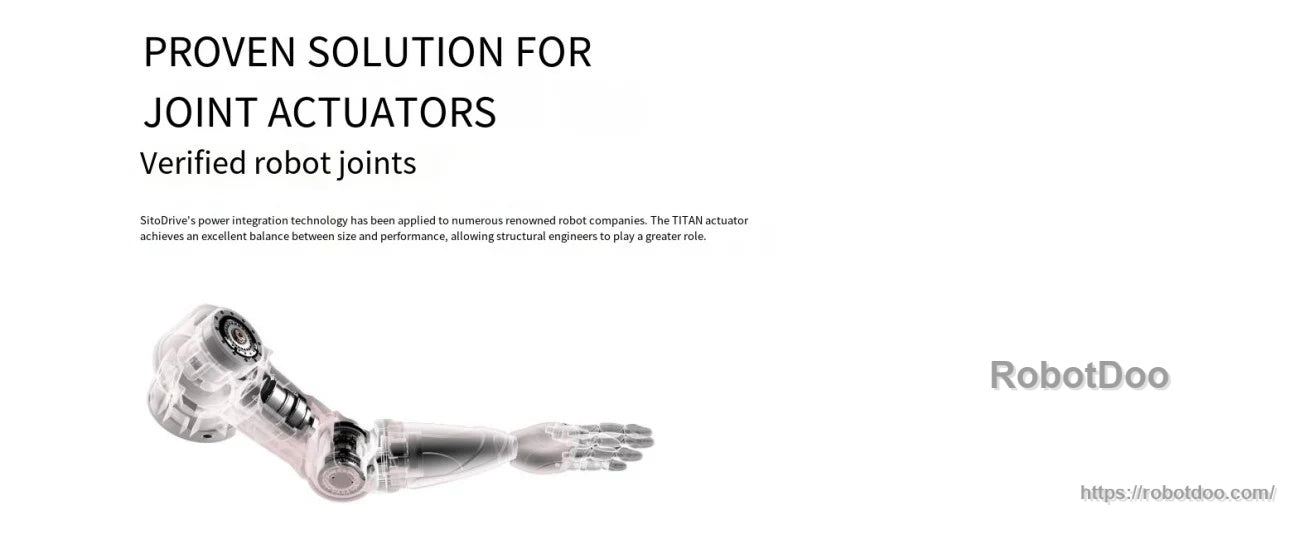
Designed for joint actuation in humanoid robots, robotic arms, exoskeletons, quadrupeds, and mobile robots.
AI-ready underlying hardware platform concept for a range of robotics applications.




