



Overview
The Unitree YS-342026 series brushless digital servo motor is a compact, highly integrated actuator for robotics motion joints and embodied intelligence applications. It combines a gear reducer, a brushless high-speed motor, and a control board package, and supports high-speed communication over a TTL-level multi-point bus.
Key Features
- Highly integrated modular design: gear reducer + brushless high-speed motor + control board package
- Hybrid control algorithm; hybrid mode supports rotor torque/angle/velocity plus rotor stiffness and damping
- High-speed communication: 6,000,000 bps, half-duplex asynchronous serial (8bit, 1 stop, no parity)
- TTL level multi-point bus connection; ID range 0–14
- Precision reducer; gear ratio 288.35:1
- Temperature and position sensing with motor feedback including rotor torque, rotor angle, output end angle, rotor angular velocity, temperature, voltage, and error status
- Model options with different mechanical materials:
- YS-342026-S288: high-strength engineering plastic gear and housing
- YS-342026-J288: steel gear and aluminum alloy housing
- Installation supports front fixing and back fixing
Applications
- Humanoid robots
- Quadruped robots
- Robotic arms
- Dexterous hands and motion joints
- Exoskeletons
- AGV vehicles
- ARU robots
- DIY creation
- Robot competitions
- Scientific research and education
Specifications
| Parameter | YS-342026-S288 | YS-342026-J288 |
|---|---|---|
| Model | YS-342026-S288 | YS-342026-J288 |
| Input Voltage Min. | 6.4V | 6.4V |
| Input Voltage Recommended | 12.6V | 25.2V |
| Input Voltage Max. | 12.6V | 25.2V |
| Voltage | 12.6V | 25.2V |
| No-load Current | 0.27A@12V | 0.45A@25.2V 0.27A@12V |
| Maximum Line Current | 0.32A | 1.92A |
| Maximum (No-load) Speed | 16.5rad/s (157rpm)@12V | 35rad/s (334rpm)@25.2V 16.5rad/s (157rpm)@12V |
| Torque Constant | 0.554Nm/A | 0.554Nm/A |
| Maximum (Stall) Torque | Torque same direction as speed: 0.07Nm Torque opposite direction as speed: 0.2Nm |
Torque same direction as speed: 0.5Nm Torque opposite direction as speed: 1.5Nm |
| Operating Temperature Min. | -20°C | -20°C |
| Operating Temperature Max. | Drive board over 90°C shutdown with overheating error Winding over 120°C shutdown with overheating error Rotor, output end, dual absolute encoder |
Drive board over 120°C shutdown with overheating error Winding over 120°C Rotor, output end |
| Position Sensor | Brushless motor | Brushless motor |
| Baud Rate | 6,000,000bps | 6,000,000bps |
| Control Algorithm | Hybrid control | Hybrid control |
| Gear Material | High-strength engineering plastic | Steel |
| Housing Material | High-strength engineering plastic | Aluminum alloy |
| Dimensions (W×H×D) | 20×34×26mm | 20×34×26mm |
| Weight | 19.5g | 35g |
| Gear Ratio | 288.35:1 | 288.35:1 |
| Command Signal | Digital data packet | Digital data packet |
| Rotor End Encoder Resolution | 15bit | 15bit |
| Protocol Type | Half-duplex asynchronous serial communication (8bit, 1stop, No Parity) | Half-duplex asynchronous serial communication (8bit, 1stop, No Parity) |
| Connection (Physical) | TTL level multi-point bus | TTL level multi-point bus |
| ID | 0–14 | 0–14 |
| Motor Sensing Feedback | Rotor torque, Rotor angle, Output end angle, Rotor angular velocity, Temperature, Voltage, Error status | Rotor torque, Rotor angle, Output end angle, Rotor angular velocity, Temperature, Voltage, Error status |
| Protocol Version | Unitree Custom Protocol | Unitree Custom Protocol |
| Operating Mode / Angle | Hybrid mode: Rotor torque, Rotor angle, Rotor angular velocity, Rotor stiffness, Rotor damping | Hybrid mode: Rotor torque, Rotor angle, Rotor angular velocity, Rotor stiffness, Rotor damping |
| Standby Current | 0.05A@12V | 0.026A@25.2V 0.05A@12V |
Documents
Details

The Unitree YS-342026 brushless digital servo motor integrates a reducer, motor, and control board for compact robotic joints.

A modular actuator design supports temperature/position feedback and TTL multi-point bus communication for coordinated motion control.

Built for embodied intelligence projects ranging from classroom prototypes to competition robots and motion-joint assemblies.
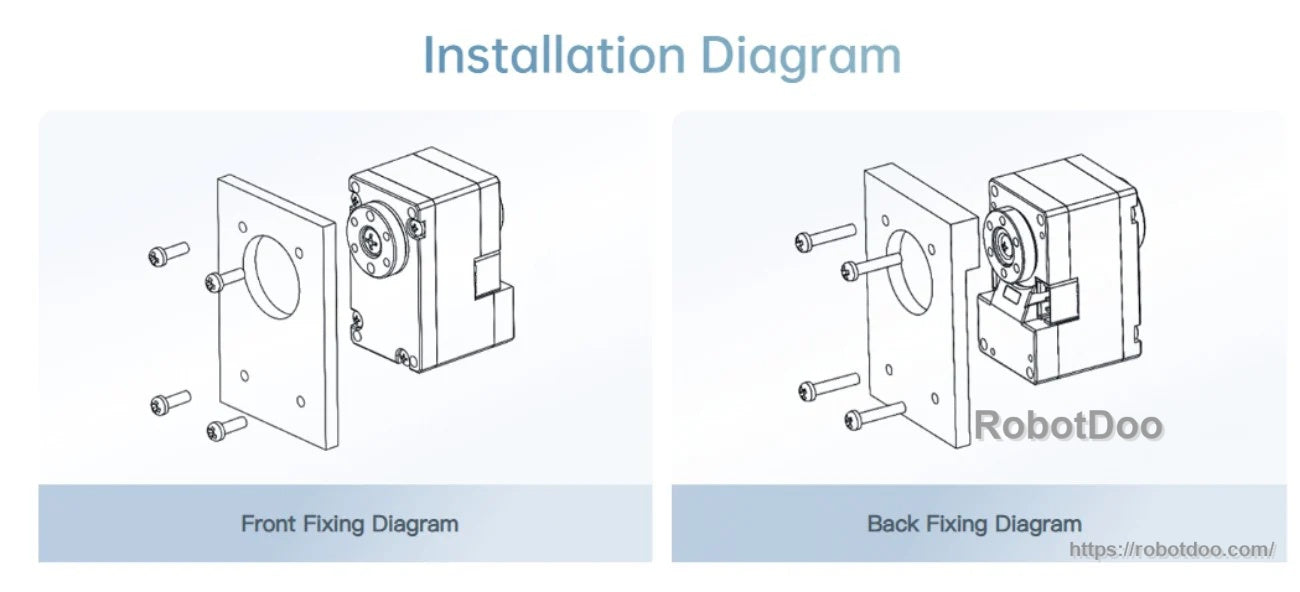
Front- and back-fixing mounting options make it easier to fit the actuator into different joint and bracket designs.



