


Overview
Xiaomi CyberGear Micro-motor is a compact servo motor designed for robotics actuation with CAN communication. It integrates a gear reducer (reduction ratio 7.75:1) and provides closed-loop speed and position control with a single-turn absolute encoder (14bit).
Feature highlights described for this micro-motor include: higher torque (torque density up to 37.85 N.m/kg), quick response via an optimized motor control algorithm, precision gears, quick-release outlet plug design for modular use and maintenance, temperature monitoring, and a self-developed motor protection algorithm for stable operation.
Key Features
- Rated voltage: 24VDC
- Torque output: 4 N.m continuous, 12 N.m peak
- Speed: 240 rpm ±10% at continuous torque; 296 rpm ±10% maximum
- Interface: CAN; communication baud rate 1 Mbps
- Single-turn absolute encoder, 14bit resolution
- Gear reduction ratio: 7.75:1
- Torque density up to 37.85 N.m/kg; power density up to 511.04 W/kg (data stated as from Xiaomi Lab)
- Temperature monitoring and protection algorithm (as described)
Specifications
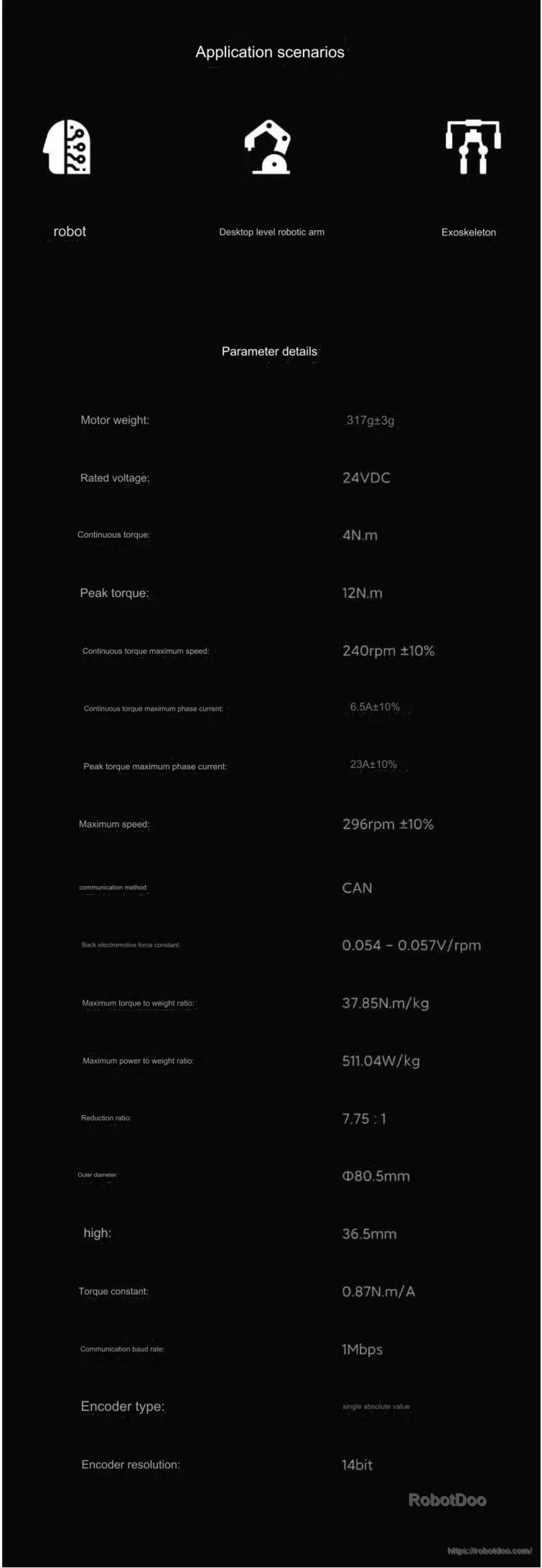
| Motor Weight | 317 g ±3 g |
| Rated Voltage | 24VDC |
| Continuous Torque | 4 N.m |
| Peak Torque | 12 N.m |
| Maximum Speed at Continuous Torque | 240 rpm ±10% |
| Maximum Phase Current at Continuous Torque | 6.5 A ±10% |
| Maximum Phase Current at Peak Torque | 23 A ±10% |
| Maximum Speed | 296 rpm ±10% |
| Communication | CAN |
| Communication Baud Rate | 1 Mbps |
| Back EMF Constant | 0.054-0.057 V/rpm |
| Torque Constant | 0.87 N.m/A |
| Maximum Torque to Weight Ratio | 37.85 N.m/kg |
| Maximum Power to Weight Ratio | 511.04 W/kg |
| Reduction Ratio | 7.75:1 |
| Outer Diameter | 80.5 mm |
| Height | 36.5 mm |
| Encoder Type | Single-turn Absolute |
| Encoder Resolution | 14bit |
Applications
- Humanoid robots
- Robotic arms (including desktop-level robotic arms)
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
Manuals & Downloads
Details

Built for robotics actuation, the CyberGear Micro-motor combines a compact body with a reducer for closed-loop speed and position control.

Performance-focused design elements include high torque density, fast control response, precision gearing, quick-release wiring, and temperature monitoring.
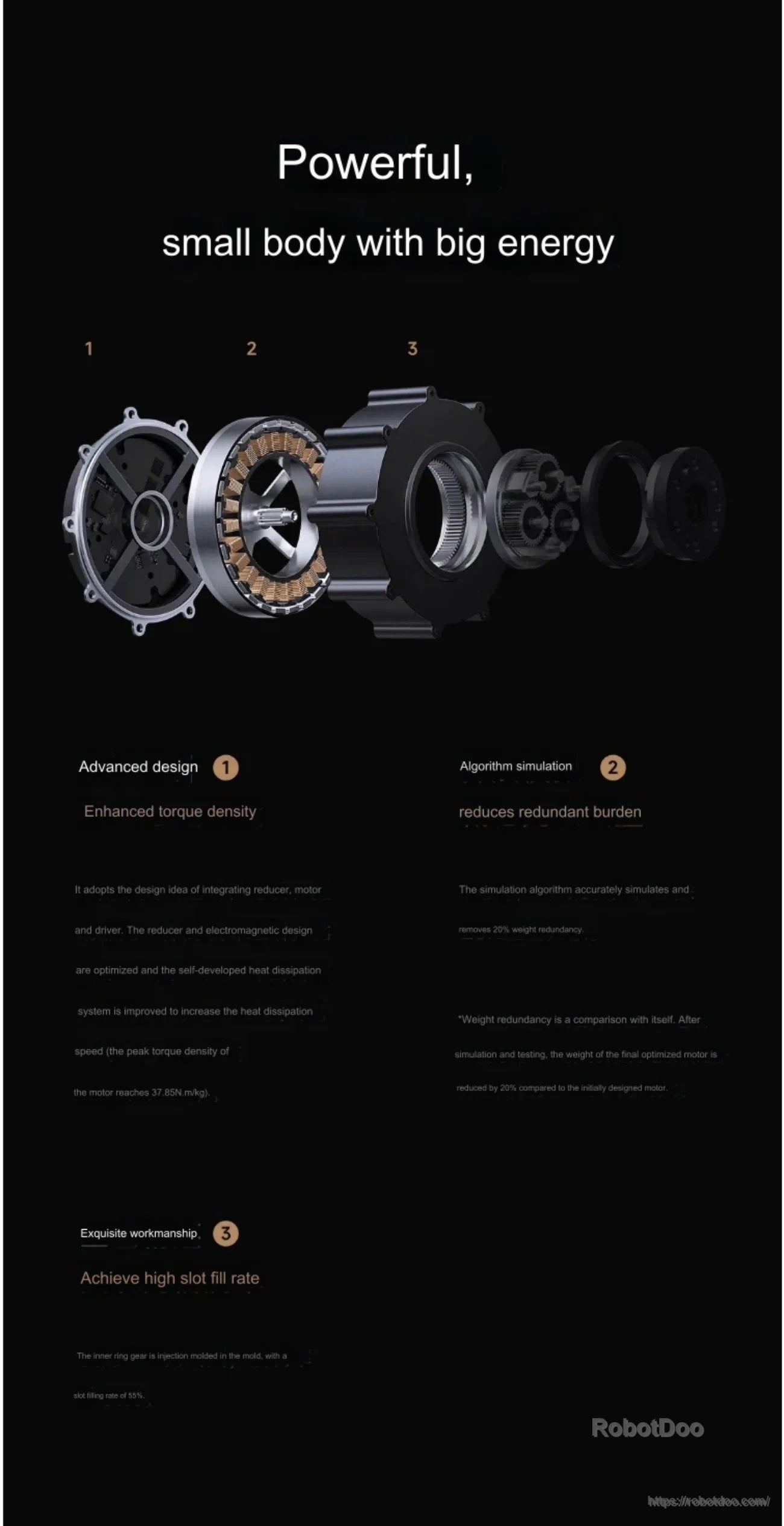
A tightly integrated internal layout supports high torque output in a small footprint for joints, arms, and other compact mechanisms.
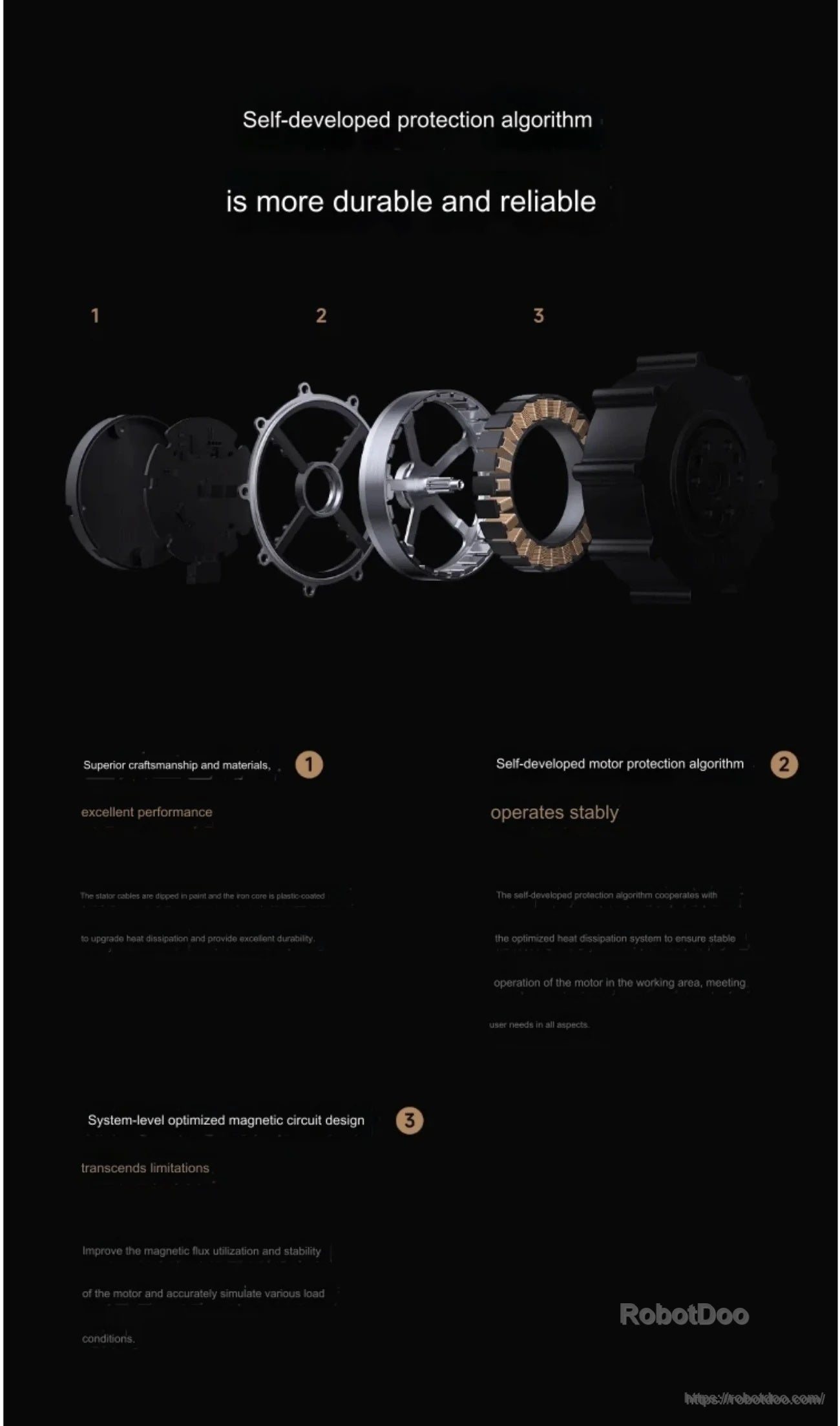
Protection logic and system-level optimization are intended to improve stability under load and help extend service life in demanding builds.
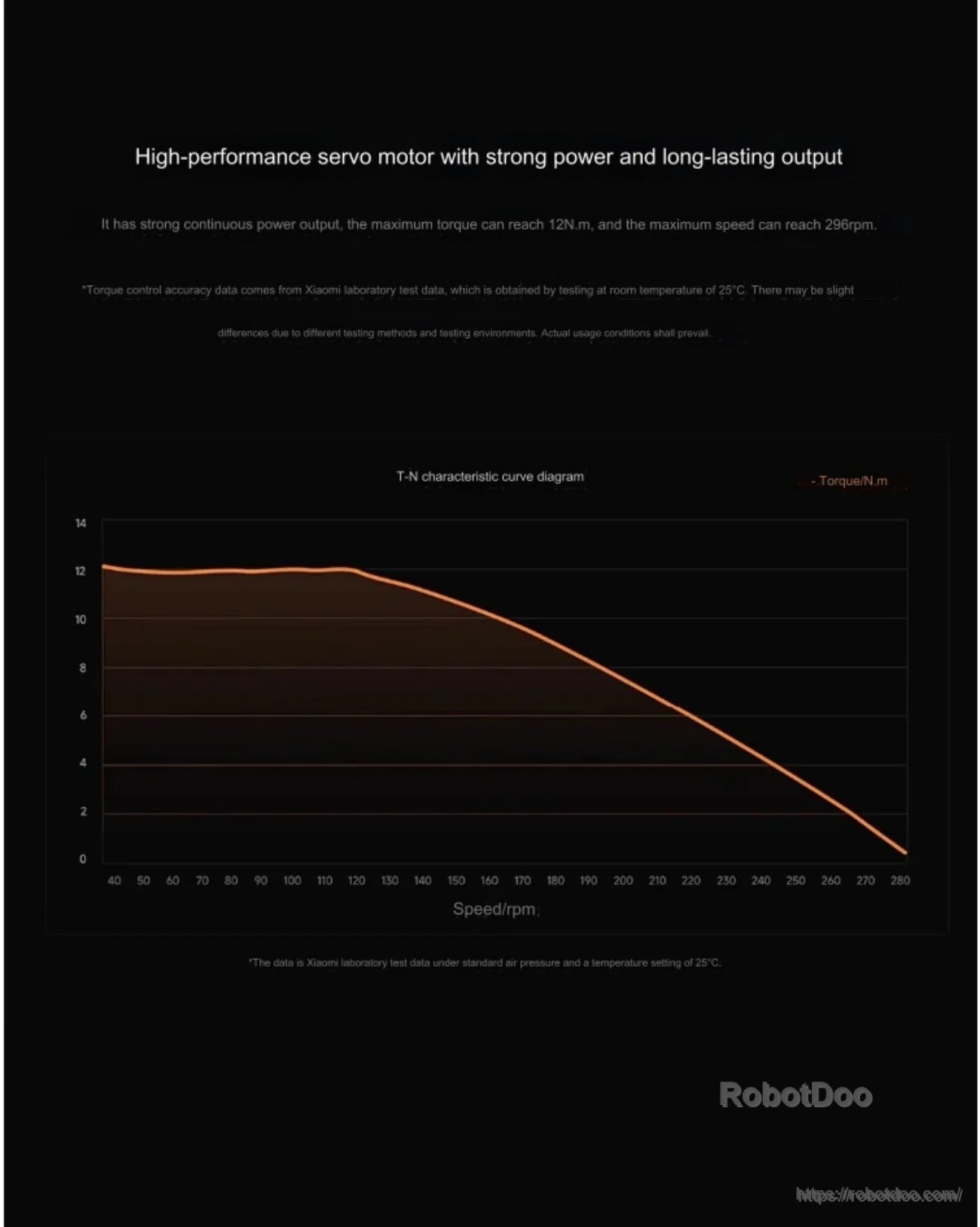
Torque–speed characteristics help with sizing the motor for joint torque requirements and target operating speed.
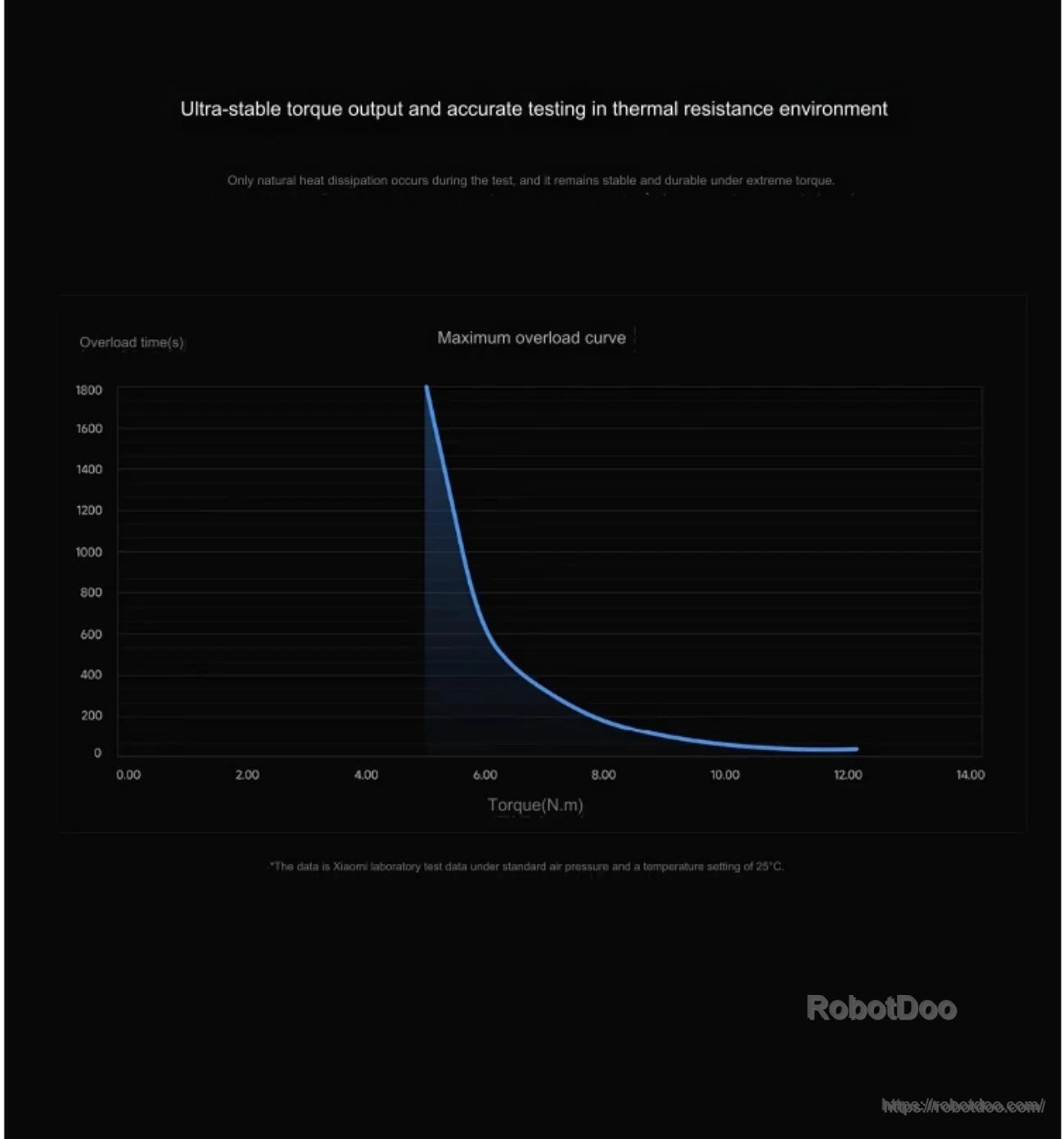
Overload-time behavior provides a quick reference for short-duration peak torque planning and thermal headroom.
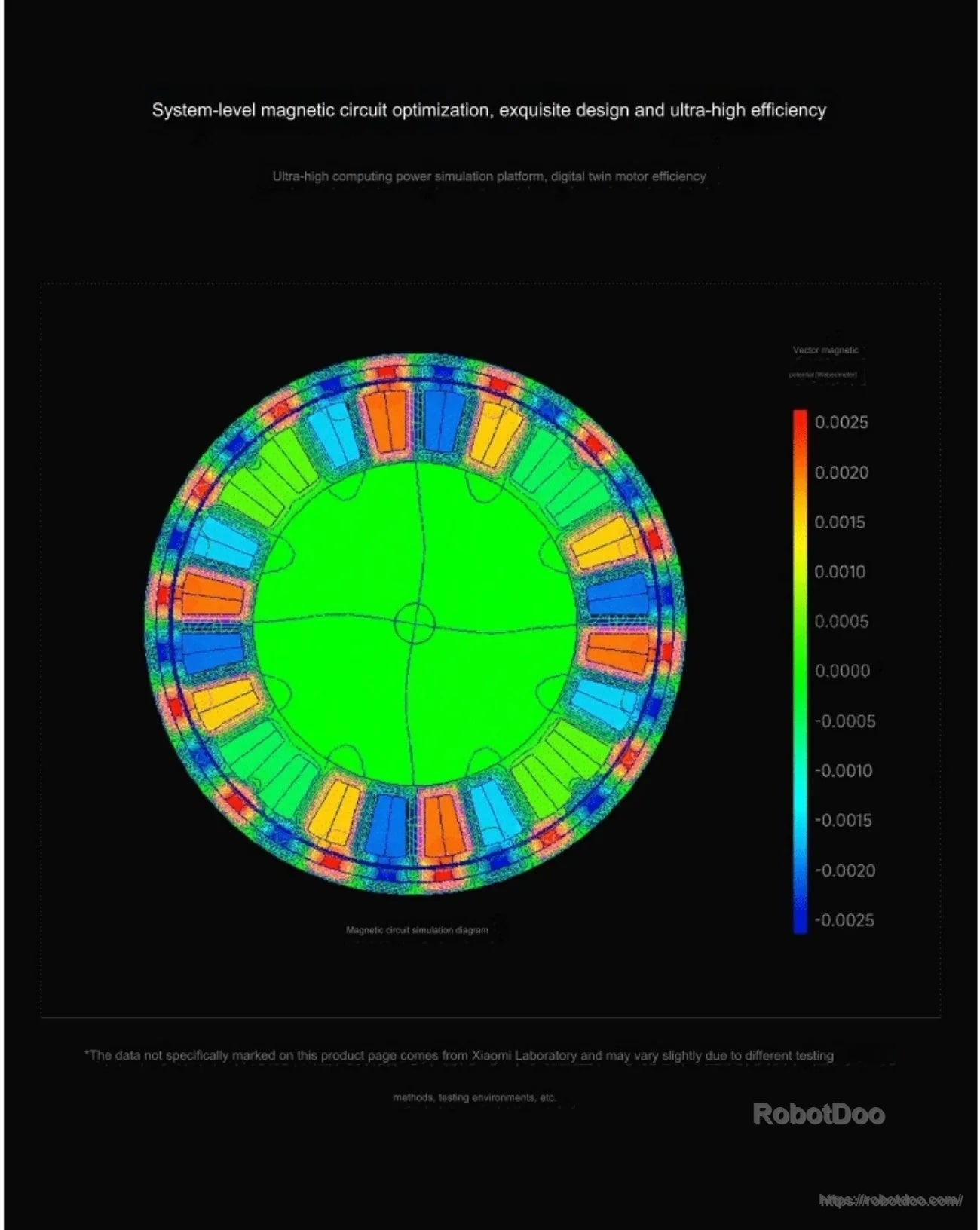
Motor design uses magnetic circuit optimization to balance efficiency and output in a compact actuator.
Common application targets include humanoid robots, robotic arms, exoskeletons, quadrupeds, and AGV platforms, with key parameters summarized for integration.


