


Overview
ZeroErr eRob90 Type I is a compact robot joint motor module for robotics joints. It is designed to reduce the labor and time costs of selecting, designing, purchasing, and assembling multiple mechanical and electronic components for robot joint integration.
Key Features
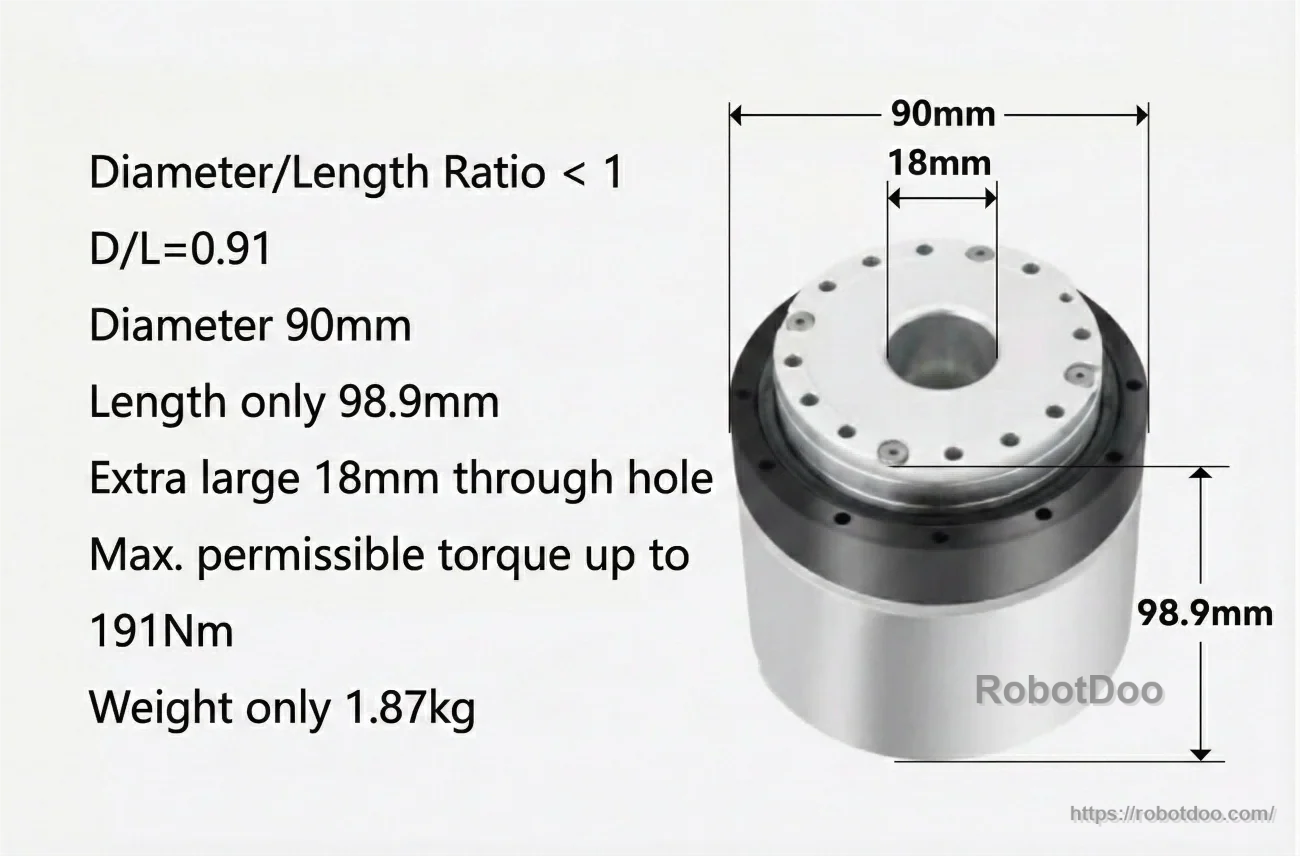
- Compact size: Diameter/Length Ratio < 1; D/L = 0.91; Diameter 90mm; Length only 98.9mm
- Hollow bore: Extra large 18mm through hole (Hollow Bore Diameter: 18mm)
- Torque capability (as stated): Max. permissible torque up to 191Nm; Weight only 1.87kg
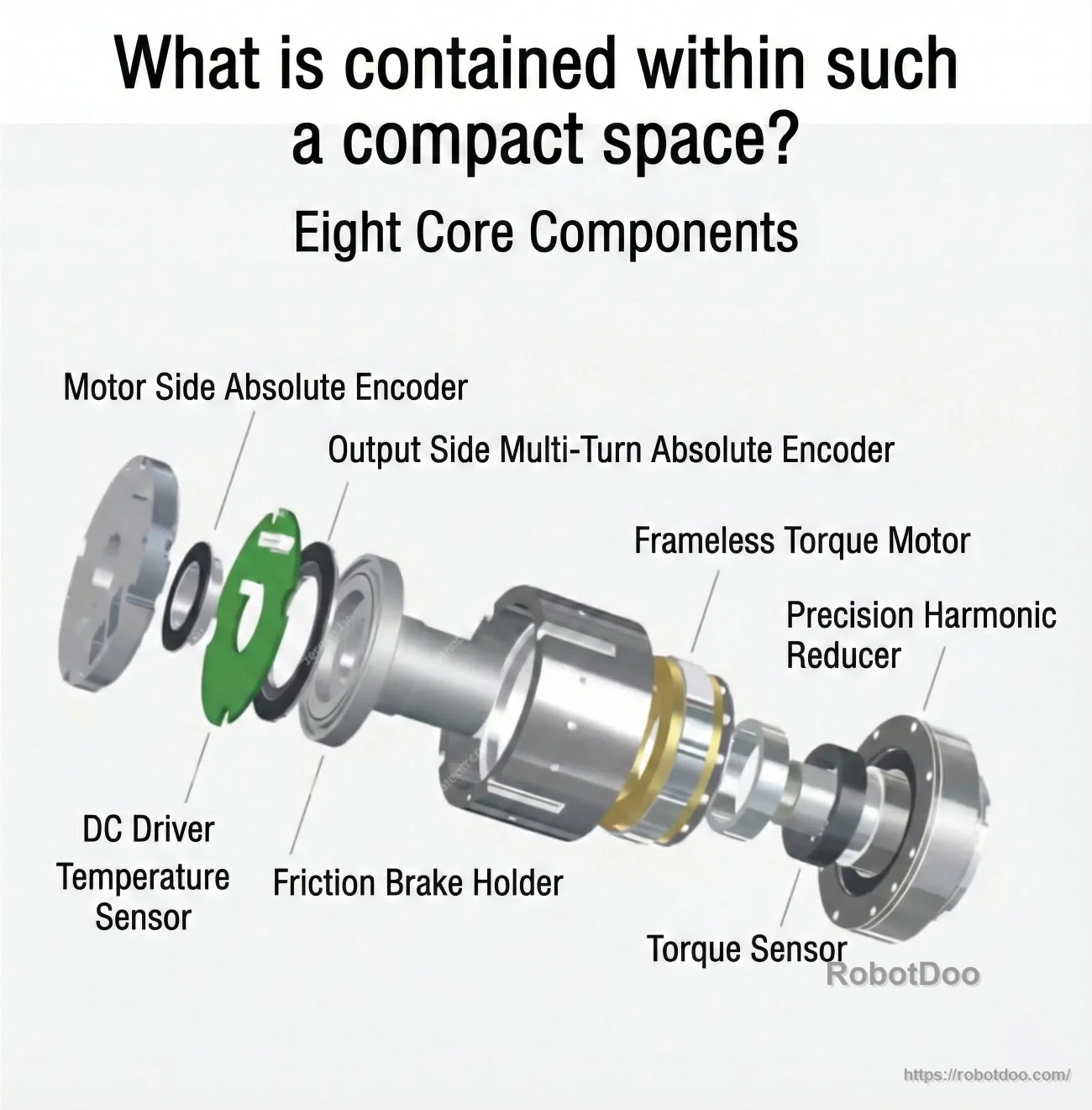
- Built-in components (Eight Core Components): Motor Side Absolute Encoder; Output Side Multi-Turn Absolute Encoder; Frameless Torque Motor; Precision Harmonic Reducer; Torque Sensor; Friction Brake Holder; DC Driver; Temperature Sensor
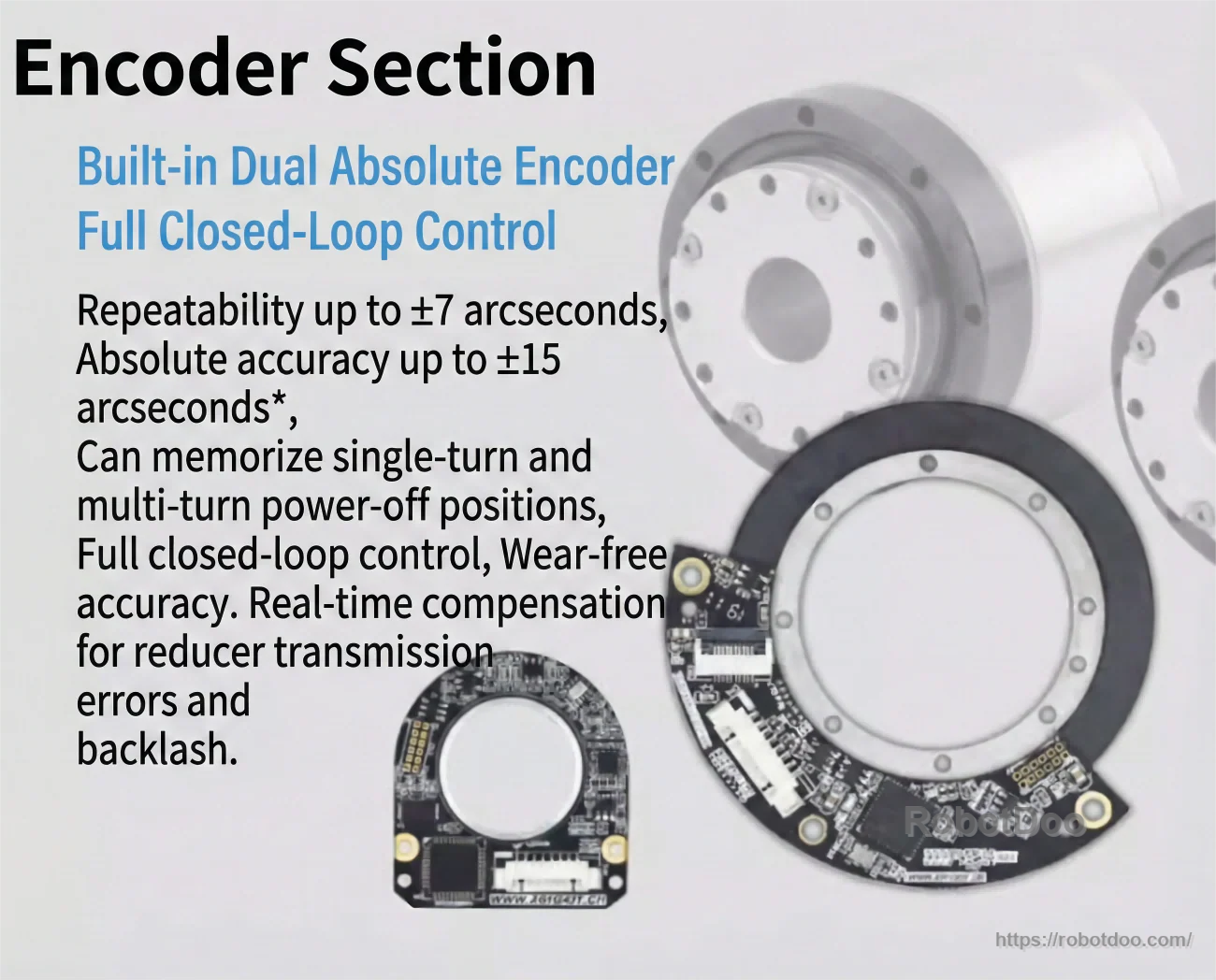
- Encoder section: Built-in Dual Absolute Encoder; Full Closed-Loop Control; Repeatability up to ±7 arcseconds; Absolute accuracy up to ±15 arcseconds*; memorizes single-turn and multi-turn power-off positions; real-time compensation for reducer transmission errors and backlash
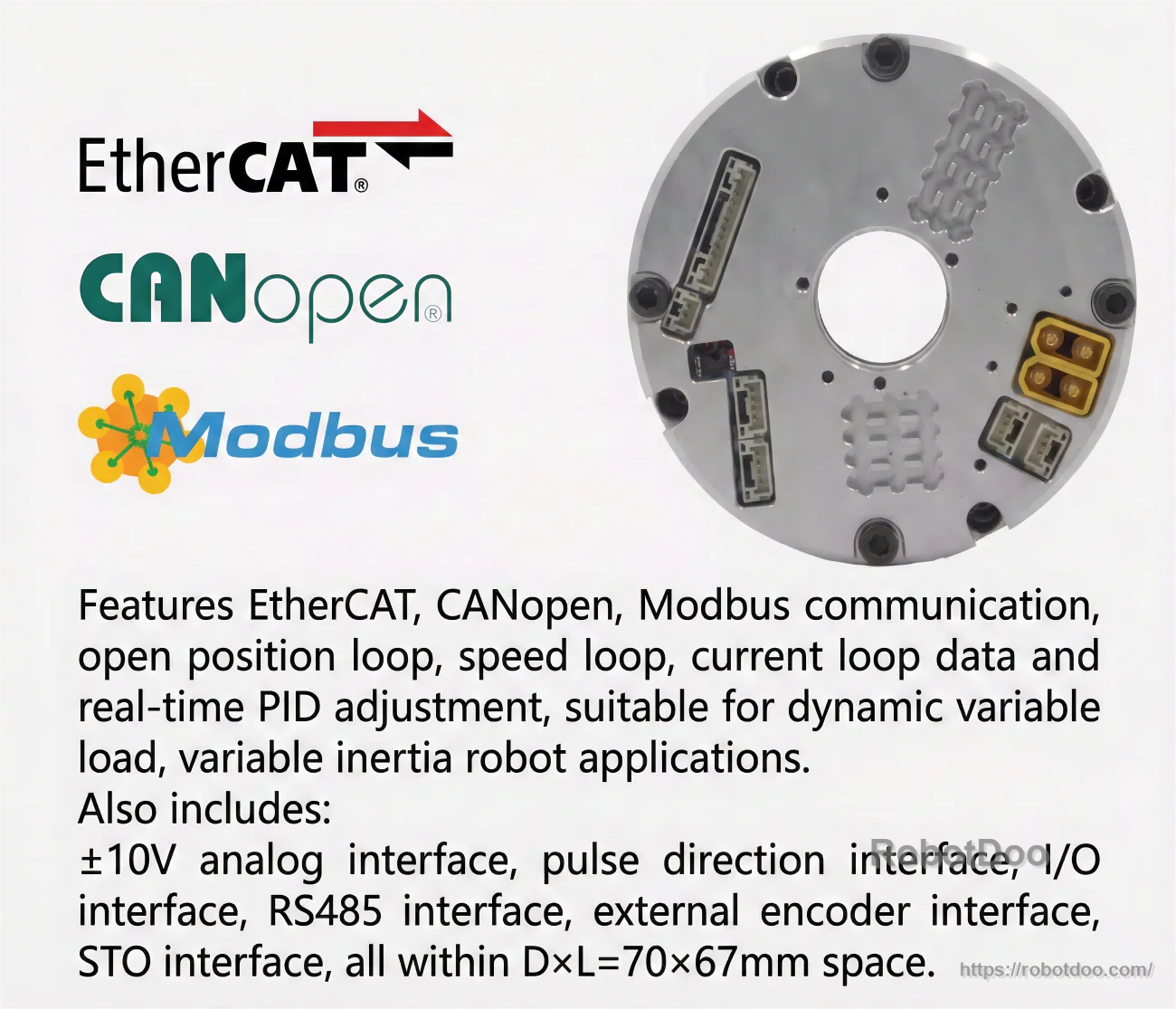
- Communications and control: EtherCAT, CANopen, Modbus communication; open position loop, speed loop, current loop data; real-time PID adjustment; suitable for dynamic variable load, variable inertia robot applications
- Additional interfaces (as stated): ±10V analog interface; pulse direction interface; I/O interface; RS485 interface; external encoder interface; STO interface; within D×L = 70×67mm space
- Brake section: High Reliability Friction Brake; uses friction-type brake holder; no wobble on stop; no shaking on start; full load zero-speed start; no wear powder during operation; no noise during rotation; withstands 100% full speed heavy load emergency stop
Specifications
Performance by strain wave gear-ratio
| Strain wave gear-ratio | 20-50 | 20-80 | 20-100 | 20-120 |
|---|---|---|---|---|
| Peak torque for start and stop (Nm) | 73 | 96 | 107 | 113 |
| Permissible max. value at average load torque (Nm) | 44 | 61 | 64 | 64 |
| Rated torque (Nm) | 33 | 44 | 52 | 52 |
| Permissible maximum momentary torque (Nm) | 127 | 165 | 191 | 191 |
| Max. output rotational speed (RPM) | 60 | 37.5 | 30 | 25 |
Electrical / mechanical
| Power Input Voltage (V) | 48V (±10%) |
| Hollow Bore Diameter | 18mm |
| Precision | Repeatability/Absolute Accuracy: ±7/±15 arc sec or ±10/±25 arc sec* |
| Electrical Interface | Communication Protocol: EtherCAT/CANopen/Modbus; Output-side Encoder Resolution: 19/20Bit |
| Installation Methods | Same, Compatible |
| Common parameters | ID: 18mm; IP grating: IP54*; Brake model: friction brake |
| Optional device | Communication type: EtherCAT/CANopen/Modbus; Output encoder resolution: 19Bit; Repeatability/Accuracy: ±7/±15 arc seconds or ±10/±25 arc seconds. |
Version-specific parameters
| Parameter | V3 | V6 |
|---|---|---|
| Motor power (W) | 300 | 314 |
| SWG Output Side Inertia (g-mm2) | 297466 | 273391 |
| SWG Output Side Mass (kg) | 0.36 | 0.321 |
| SWG Input Side Inertia (g·mm²) (Without Brake) | 139067 | 95791 |
| SWG Input Side Mass (kg) (Without Brake) | 0.41 | 0.257 |
| OD × Length (mm) (Without Brake) | Φ90x98.9 | Φ90x75.9 |
| Total Mass (kg) (Without Brake) | 1.75 | 1.506 |
| SWG Input Side Inertia (g·mm²) (With Brake) | 147025 | 110213 |
| SWG Input Side Mass (kg) (With Brake) | 0.43 | 0.292 |
| OD × Length (mm) (With Brake) | Φ90x98.9 | Φ90x75.9 |
| Total Mass (kg) (With Brake) | 1.87 | 1.639 |
Applications
- Humanoid Robots
- Robotic Arms
- Exoskeletons
- Quadruped Robots
- AGV Vehicles
- ARU Robots
- Collaborative Robot
- Medical Robot
- Automation Equipment
For integration and document selection support, contact the store customer service team.
Manuals
Details

The ZeroErr eRob90 Type I integrates drive, sensing, and gearing into a compact robot joint module to simplify joint design and assembly.
Compact 90 mm × 98.9 mm form factor with an 18 mm through-hole supports clean cable routing and lightweight joint integration.
Eight core components are built in, including dual absolute encoders, frameless torque motor, precision harmonic reducer, torque sensor, and driver.
Communication and control options include EtherCAT, CANopen, and Modbus, along with analog, pulse-direction, RS485, encoder, and STO interfaces.
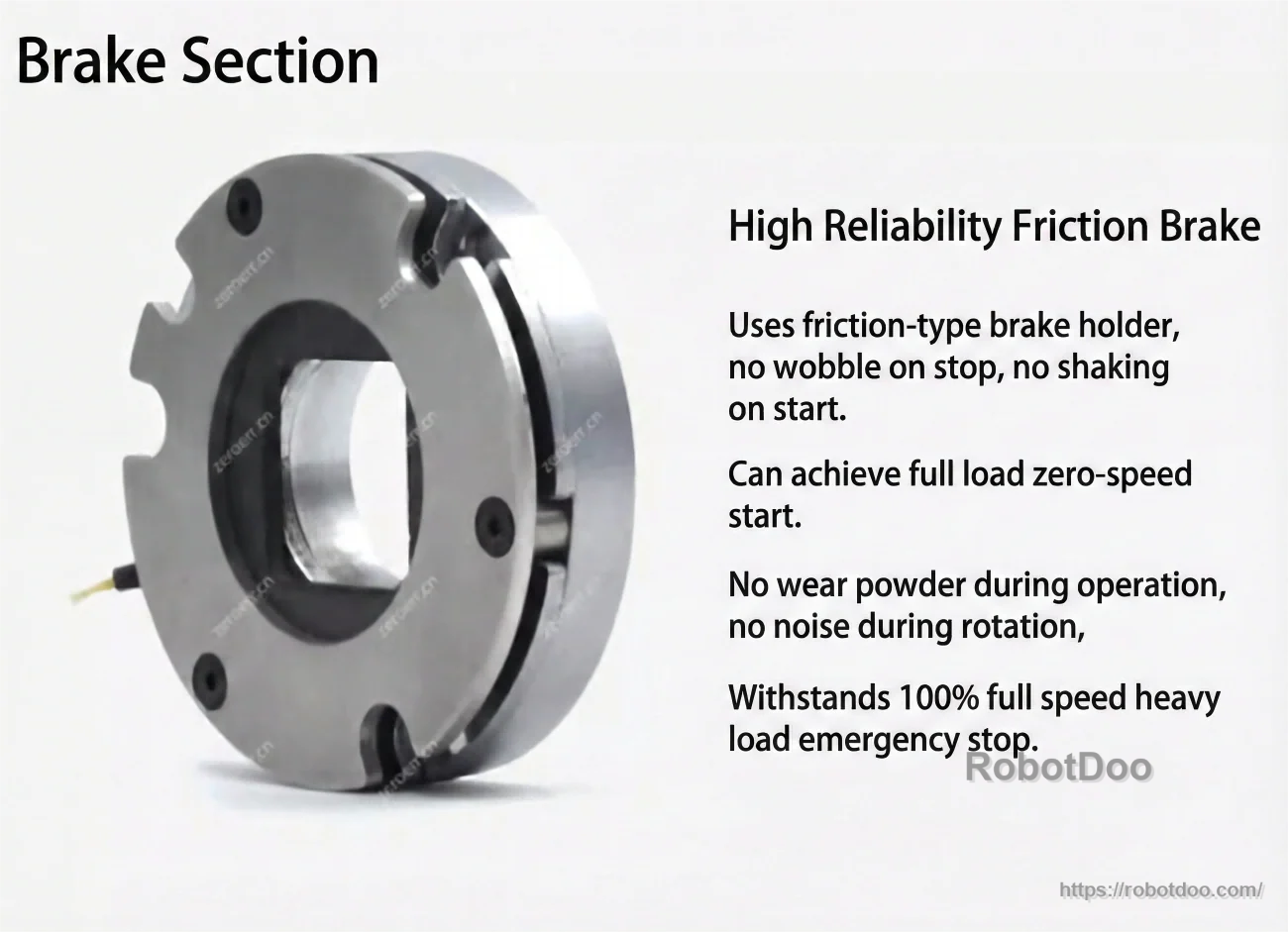
A friction brake holder is designed to reduce wobble at stop and support full-load zero-speed starts for safer joint control.



