Product Description
GIM3510-8 Compact Robot Joint Actuator
The GIM3510-8 is a high-performance integrated robot joint actuator designed for humanoid robots, robotic arms, and precision motion systems. It integrates a planetary gearbox, dual encoder system, and embedded driver, delivering high torque, precise control, and compact size.
With support for CAN and RS485 communication, this actuator is ideal for advanced robotics applications requiring high reliability and accuracy.
Key Features
-
High Torque Output
- Peak torque up to 6 Nm
-
Dual Encoder System
- High precision position feedback
- Improved motion accuracy and stability
-
Integrated Driver Design
- Compact all-in-one structure
- Reduced wiring complexity
-
Planetary Gear System
- Gear ratio: 8:1
- Low backlash: 15 arcmin
-
Industrial Communication
- Supports CAN and RS485
-
Compact and Lightweight
- Weight approx. 260g
- Ideal for space-constrained systems
Technical Specifications
| Parameter | Value |
|---|---|
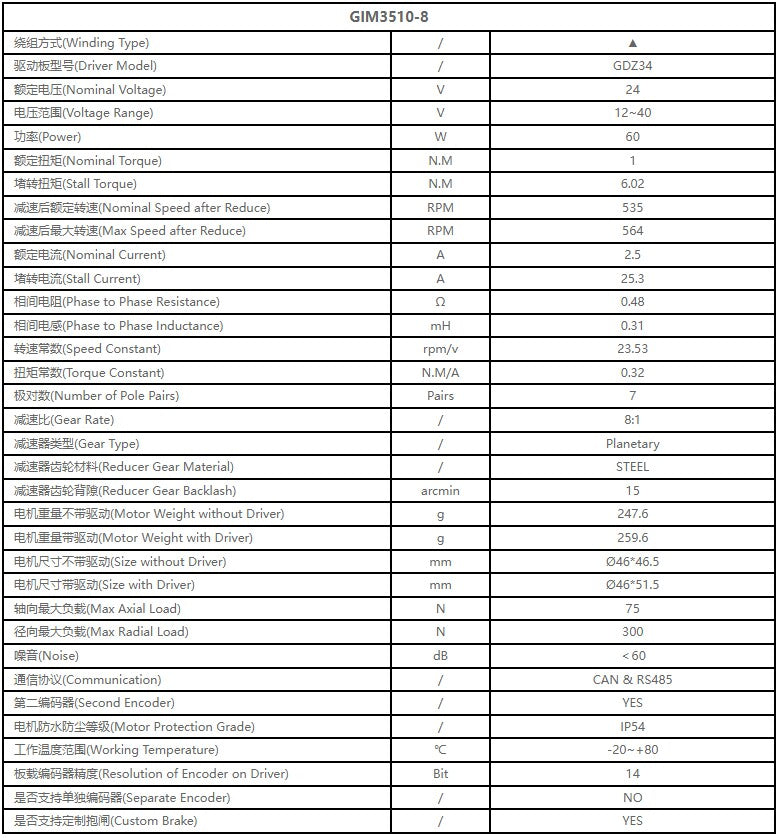
| Model | GIM3510-8 |
| Nominal Voltage | 24V |
| Voltage Range | 12–40V |
| Power | 60W |
| Nominal Torque | 1 Nm |
| Stall Torque | 6.02 Nm |
| Nominal Speed | 535 RPM |
| Max Speed | 564 RPM |
| Nominal Current | 2.5 A |
| Stall Current | 25.3 A |
| Gear Ratio | 8:1 |
| Gear Type | Planetary |
| Backlash | 15 arcmin |
| Encoder Resolution | 14-bit |
| Communication | CAN / RS485 |
| Protection Level | IP54 |
| Operating Temperature | -20°C to +80°C |
| Weight | 247.6g (motor) / 259.6g (with driver) |
| Size | Ø46 × 46.5 mm |
Driver Options
| Driver | Communication | Encoder | Voltage | Dual Encoder |
|---|---|---|---|---|
| GDS34 | CAN | MT6816 | 12–48V | No |
| GDZ34 | CAN / RS485 | MA7XX | 12–40V | Yes |
Structure Overview
- Planetary reducer system
- Stator and rotor assembly
- Integrated encoder system
- Optional brake and torque sensor
- Embedded driver board
Applications
- Humanoid robots
- Robotic arms
- Exoskeleton systems
- AGV and AMR robots
- Industrial automation