



Overview
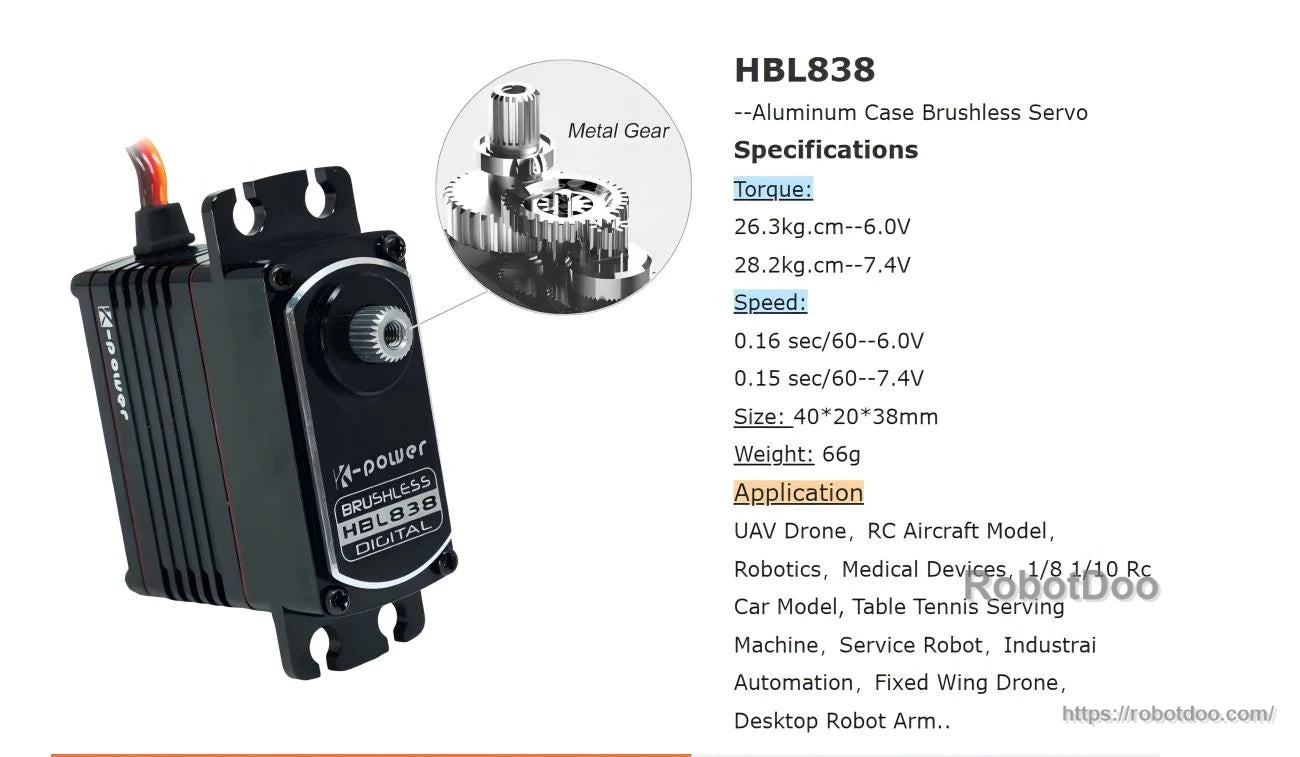
The Kpower HBL838 is a brushless, digital servo motor designed for multi-scenario motion control in robotics and RC/mechatronics. It uses a metal gear train and an aluminum alloy case, and supports PWM, TTL, and RS-485 control interfaces. Manufacturer artwork for the HBL Series also states a high-torque brushless motor, high-precision metal gear, and an up to million-cycle lifespan.
Logos shown on manufacturer artwork: ISO, CE, RoHS, EN71.
Key Features
- Brushless motor
- Metal gear train
- Aluminum alloy / aluminum case
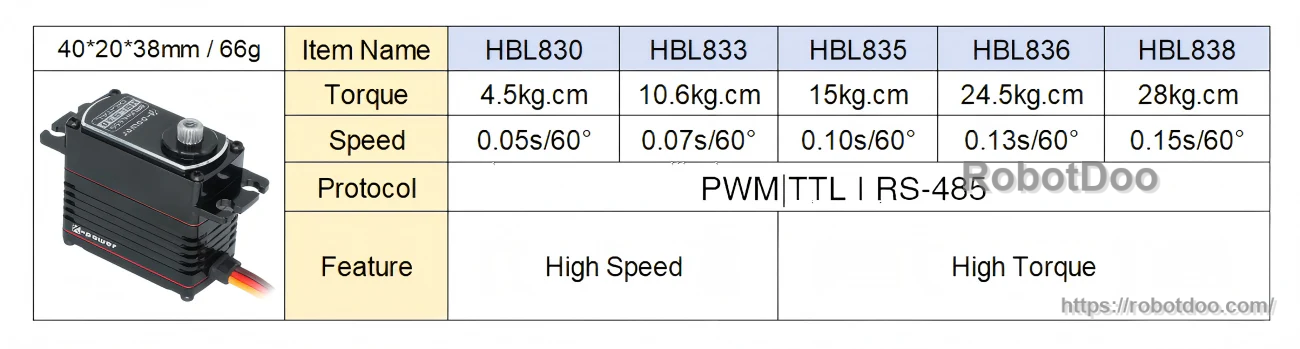
- Control protocols listed: PWM | TTL | RS-485
- Travel angle range listed: 120° (customizable); standard angles shown: 120°, 180°, 270°, 360°
- 3-wire servo lead pinout shown: Brown = GND, Red = Vcc, Orange = Signal
- Servo plug wire types shown: JR, FUTABA
- Servo horn styles shown: Flat, Cross, Round, Star, Single
Specifications
| Model | HBL838 |
| Motor | Brushless |
| Gear Material | Metal |
| Case Material | Aluminum Alloy |
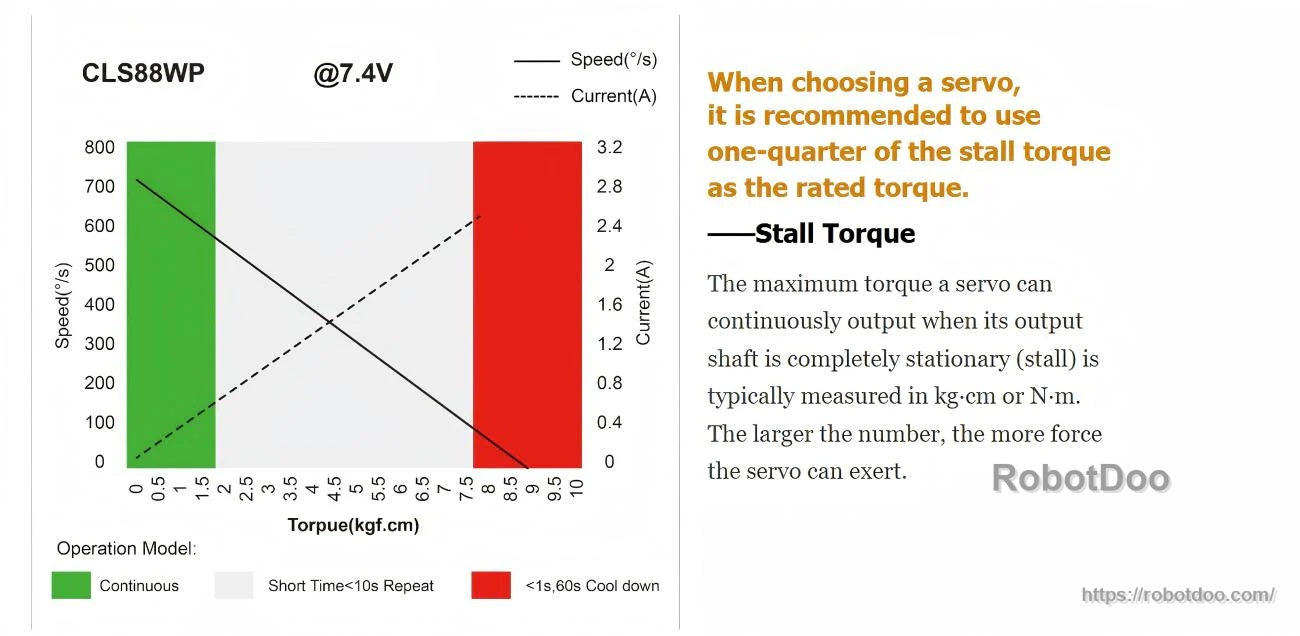
| Stall Torquee (as provided) | 28 kg |
| Torque (HBL Series table) | 28 kg.cm |
| Torque (manufacturer spec by voltage) | 26.3 kg.cm @ 6.0V; 28.2 kg.cm @ 7.4V |
| Rated Torquee (as provided) | 7 kg |
| No-load Speed (as provided) | 0.15 s/60° |
| Speed (manufacturer spec by voltage) | 0.16 sec/60° @ 6.0V; 0.15 sec/60° @ 7.4V |
| Operating Voltage (as provided) | 4.8 ~ 8.4 V |
| Working Frequency (as provided) | 50 ~ 333 Hz |
| Digital servo high-frequency signal compatibility (manufacturer note) | 50–300 Hz |
| Travel Angle Range (as provided) | 120° (Customizable) |
| Standard Angle (manufacturer note) | 120°, 180°, 270°, 360° |
| Horn Gear Spline (as provided) | 25T, phi 5.9 mm |
| Position Sensor (as provided) | Potentiometer |
| Ball Bearing (as provided) | 2BB |
| No-load Current (as provided) | 4500 mA |
| Dimensions (as provided) | 40 x 20 x 38 mm |
| Weight (as provided) | 66 g |
| Operating Temperature (as provided) | -10 ~ 50°C |
| IP Rating (as provided) | IP42 |
| Protocol (as provided) | PWM | TTL | RS-485 |
Control Signal Notes (from manufacturer diagrams)
- Input signal pulse width: 20 ms per cycle
- Example mapping shown: 0.5 ms = -90°, 1 ms = -45°, 1.5 ms = 0°, 2 ms = 45°, 2.5 ms = 90°
- Rotation angle/speed notes shown: standard speed 0.10–0.15 s/60° (~65 RPM); attainable speed 0.3 s/60° (~33 RPM)
- Servo dead band note shown: Analog 1–5 us (our servo: 4 us); Digital 1–3 us (our servo: 2 us)
Applications
- Humanoid robots
- Robotic arms / desktop robot arm
- Exoskeletons
- Quadruped robots
- AGV vehicles
- ARU robots
- UAV drone / fixed wing drone
- RC aircraft model
- 1/8 and 1/10 RC car model
- Industrial automation
- Service robot
- Table tennis serving machine
- Medical devices (as listed by the manufacturer)
Manuals
Customization (ODM) Notes
- Customization items shown: appearance, torque, protocols, wiring sequences, and more
- Reliability design options shown: electronic protection, waterproofing, and low-temperature resistance
Details

The Kpower HBL838 Servo Motor is built for robotics and RC motion control with a durable metal gear train and alloy housing.

A brushless drive and precision metal gearing help deliver stable torque for repetitive, high-load actuation.
Key specs include up to 28.2 kg·cm torque at 7.4V, 0.15 s/60° speed, and a 40×20×38 mm footprint.


Choose from multiple horn styles to match linkages, wheels, or custom brackets in your build.
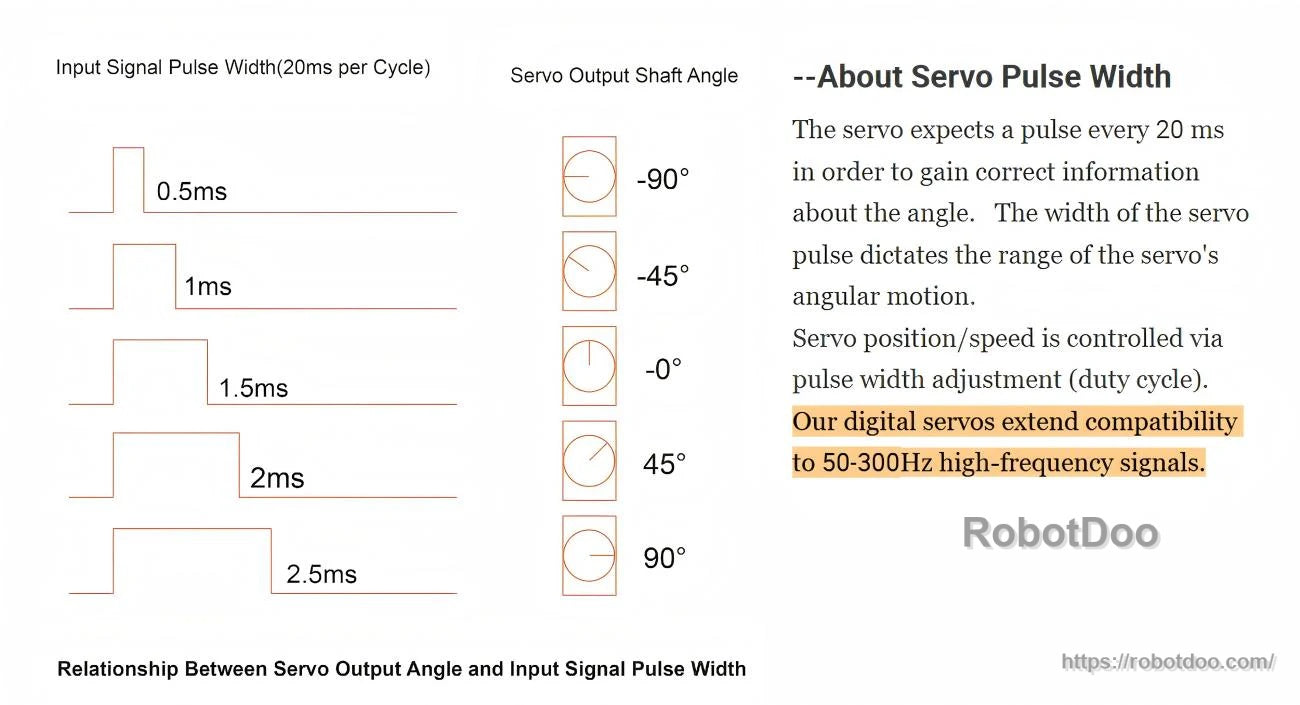
PWM control uses a 20 ms cycle with pulse width setting the target position; compatibility is noted for 50–300 Hz signals.

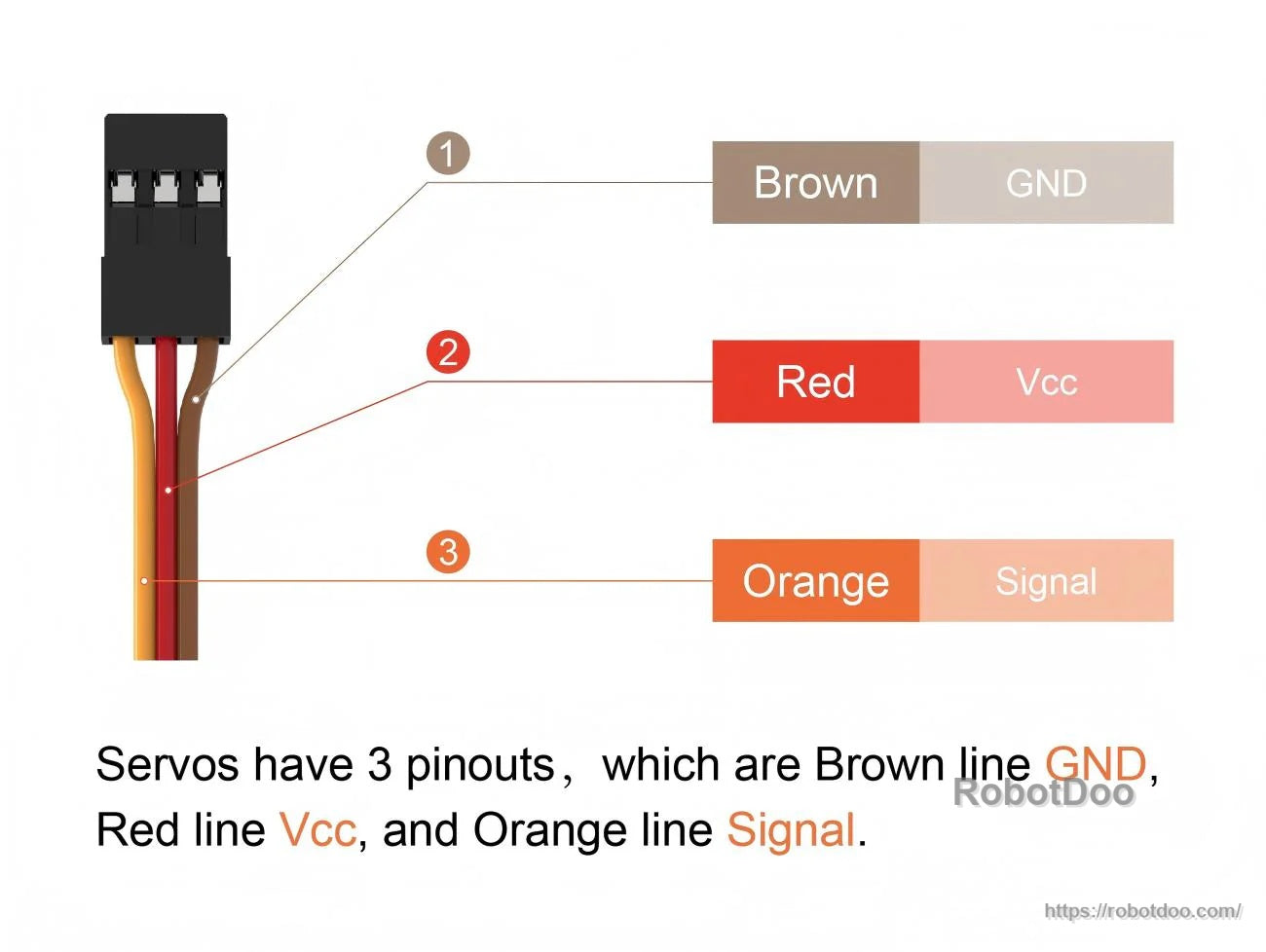
Wiring is straightforward with brown for ground, red for power, and orange for the control signal line.

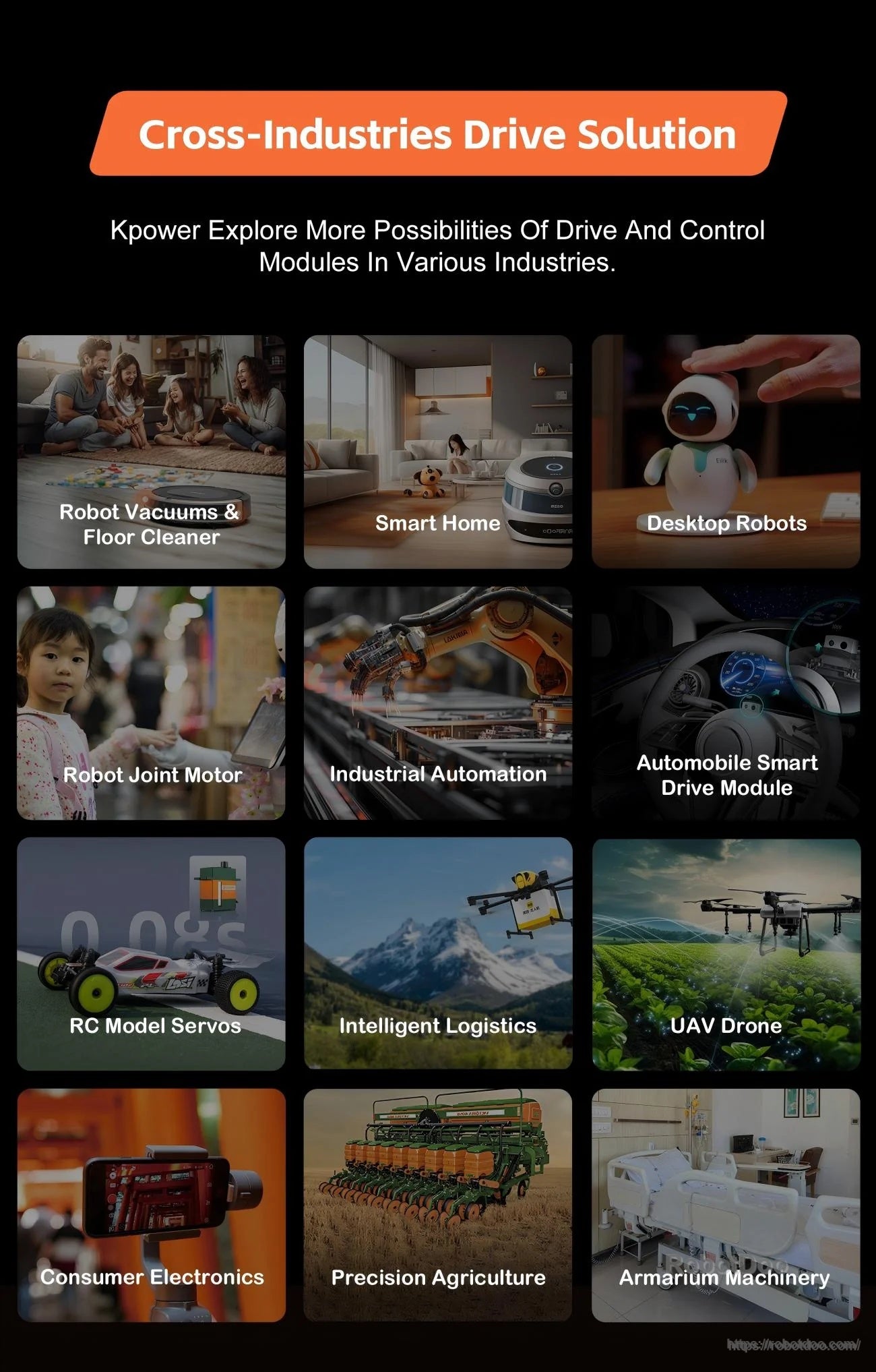
A solid fit for humanoid robots, robotic arms, quadrupeds, AGV platforms, and UAV or RC aircraft projects.




