Overview
MyActuator RMD-X12-320 Motor is an integrated planetary actuator motor designed for robotics and automation joints, featuring CAN BUS/EtherCAT communication and a dual encoder (ABS-17BIT input / 17BIT output) for precise control.
Key Features
- CAN BUS & EtherCAT communication
- Dual encoder
- Crossed roller bearings
- Hollow design
- High torque density
- High precision
Specifications
| Gear Ratio | 20 |
| Input Voltage | 48V |
| No Load Speed | 125RPM |
| No-Load Input Current | 2.7A |
| Rated Speed | 100RPM |
| Rated Torque | 85N.m |
| Rated Output Power | 900W |
| Rated Phase Current | 30A(rms) |
| Peak Torque | 320N.m |
| Peak Phase Current | 100A(rms) |
| Efficiency | 75% |
| Motor Back-EMF Constant | 17.9Vdc/Krpm |
| Module Torque Constant | 3.3N.m/A |
| Motor Phase Resistance | 0.12Ω |
| Motor Phase Inductance | 0.05mH |
| Pole Pair | 20 |
| 3 Phase Connection | Y |
| Back Drive Torque | 3.8N.m |
| Backlash | 10Arcmin |
| Output Bearing Type | Crossed Roller Bearings |
| Axial Load Suffer | 4.5KN |
| Axial Load Stress | 4.5KN |
| Radial Load | 5KN |
| Inertia | 12.9Kg.cm² |
| Encoder Type & Interface | Dual Encoder ABS-17BIT(Input)/17BIT (Output) |
| Control Accuracy | <0.01Degree |
| Communication | CAN BUS/EtherCAT |
| Weight | 2.37Kg |
| Insulation Grade | F |
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles / smart warehousing robots
- Industrial automation (including CNC machine tools and automation equipment)
- Gimbals and PTZ systems
- Inspection systems
- Smart agriculture equipment
- ARU robots
Manuals & Files
- MyActuator_RMD_X12_320.stp
- Motor_Motion_Protocol.pdf
- EtherCAT_control_protocol.pdf
- User_Manual_for_X_Series_Products.pdf
- X12-320_Interface_Description.pdf
- X12-320_Structure_diagram.pdf
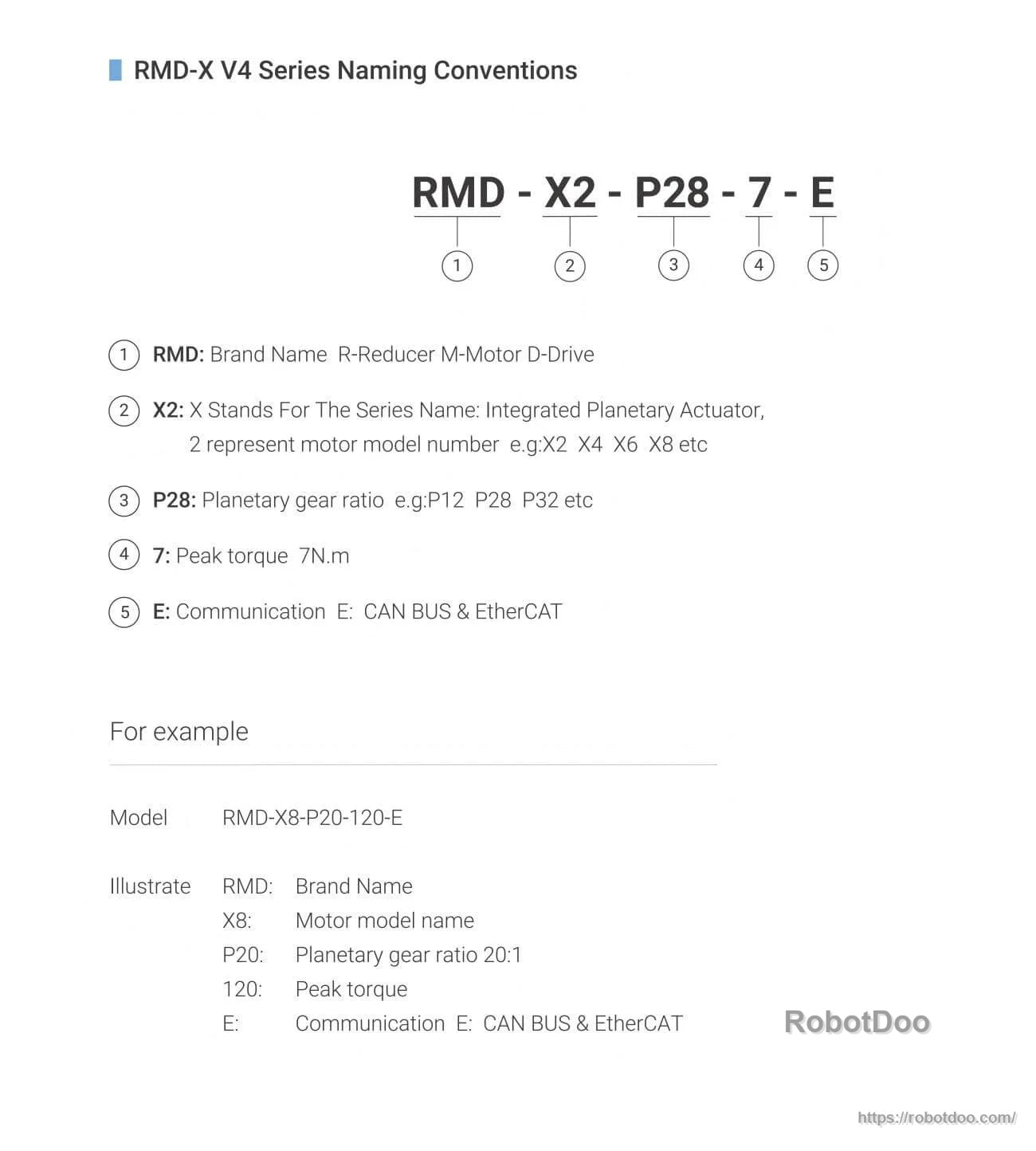
RMD-X V4 Series Naming Convention (Reference)
Format: RMD - X2 - P28 - 7 - E
- RMD: Brand name (R-Reducer, M-Motor, D-Drive)
- X2: Series name: Integrated Planetary Actuator; “2” represents motor model number (e.g., X2, X4, X6, X8)
- P28: Planetary gear ratio (e.g., P12, P28, P32)
- 7: Peak torque 7 N.m
- E: Communication: CAN BUS & EtherCAT
Example model: RMD-X8-P20-120-E (P20: planetary gear ratio 20:1; 120: peak torque; E: CAN BUS & EtherCAT)
Details