Overview
The MyActuator RMD-X8-120 Motor is an integrated planetary actuator (RMD-X V4 Series) designed for robotics motion systems requiring high torque density and high precision. It supports 48V input and provides CAN BUS / EtherCAT communication with a dual encoder (ABS-17BIT input / 17BIT output) for closed-loop control.
Key Features
- Communication: CAN BUS / EtherCAT
- Dual encoder: ABS-17BIT (Input) / 17BIT (Output)
- Output bearing type: Crossed roller bearings
- Hollow design
- High torque density, high precision
Specifications
| Gear Ratio | 19.612 |
| Input Voltage | 48V |
| No Load Speed | 158RPM |
| No-Load Input Current | 1.6A |
| Rated Speed | 127RPM |
| Rated Torque | 43N.m |
| Rated Output Power | 574W |
| Rated Phase Current | 17.6A(rms) |
| Peak Torque | 120N.m |
| Peak Phase Current | 43.8A(rms) |
| Efficiency | 79% |
| Motor Back-EMF Constant | 19.2Vdc/Krpm |
| Module Torque Constant | 2.4N.m/A |
| Motor Phase Resistance | 0.18Ω |
| Motor Phase Inductance | 0.31mH |
| Pole Pair | 10 |
| 3 Phase Connection | Y |
| Back Drive Torque | 3.21N.m |
| Backlash | 10Arcmin |
| Output Bearing Type | Crossed Roller Bearings |
| Axial Load Suffer | 4KN |
| Axial Load Stress | 1KN |
| Radial Load | 4.5KN |
| Inertia | 1.5Kg.cm^2 |
| Encoder Type & Interface | Dual Encoder ABS-17BIT(Input)/17BIT (Output) |
| Control Accuracy | <0.01Degree |
| Communication | CAN BUS/EtherCAT |
| Weight | 1.4Kg |
| Insulation Grade | F |
Applications
- Humanoid robots
- Robotic arms
- Exoskeletons
- Quadruped robots
- AGV vehicles / smart warehousing robots
- ARU robots
Manuals
- MyActuator_RMD_X8_120.stp
- Motor_Motion_Protocol.pdf
- EtherCAT_control_protocol.pdf
- User_Manual_for_X_Series_Products.pdf
- X8-120_Accessories.pdf
- X8-120_Motor_Assembly_Drawing.pdf
Details

High‑torque, high‑precision integrated planetary actuators in the MyActuator RMD‑X V4 series for robotics motion systems.
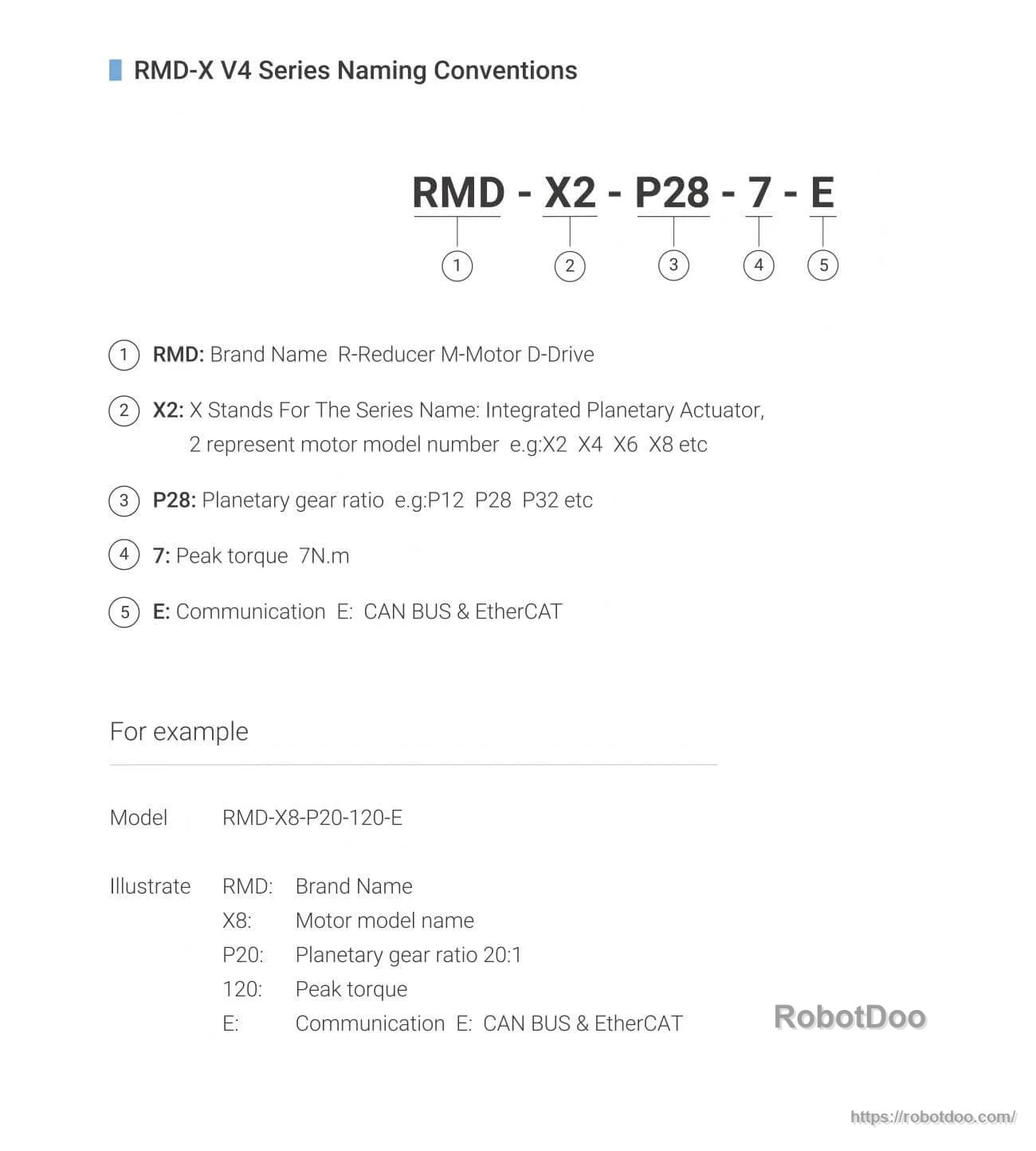
Model naming breaks out the actuator series, planetary gear ratio, peak torque rating, and CAN BUS/EtherCAT communication.
Designed for humanoid robots, robotic arms, exoskeletons, quadrupeds, AGVs, smart warehousing, and industrial automation.